本文主要是介绍机器学习之利用k-means算法对点云数据进行目标分割,提取其中的建筑物、房屋等,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
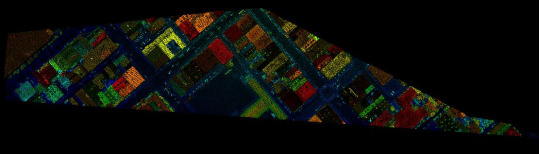
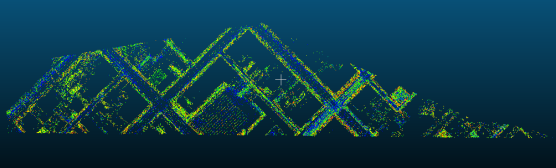
原始点云数据在CloudCompare的显示如下:
利用k-means算法提取出其中的建筑物、房屋等,我这里的代码是根据k-means算法的原理编写的代码,这样有助于大家对k-means算法的运行原理有一个深层次的了解,当然也可以直接调用sklearn里的算法,但是那样的话对于将来发展是不利的,毕竟知道算法的原理并根据原理编写代码学到的知识还是更多一些的。
代码如下:
#Author ZTY
import csv
import numpy as np
def kmean(x,k,maxtimes):m,n = np.shape(x)# 建立一个比数据集多一列的零矩阵,多的一列用来存放标签dataset = np.zeros([m,n+1])dataset[:,:-1] = x#根据要聚类的数量,初始化相应数量的中心点,可以随机选择n个,也可以选前n个作为初始点#middle = dataset[np.random.randint(m,size=k),:]middle = dataset[0:3,:]#为选定的中心点赋予标签middle[:,-1] = range(1,k+1)times = 0oldmiddle = None#迭代更新中心点时,判断何时停止while not shouldstop(oldmiddle,middle,times,maxtimes):print('times:',times)print('dataset:',dataset)print('middle:',middle)oldmiddle = np.copy(middle)times = times + 1#根据中心点,更新其他各个点的标签update(dataset,middle)#获取新的中心点middle = getmiddles(dataset,k)return datasetdef shouldstop(oldmiddle,middle,times,maxtimes):if times > maxtimes:return Truereturn np.array_equal(oldmiddle,middle)def update(dataset,middle):m,n =dataset.shapefor i in range(0,m):dataset[i,-1] = getLabelFromCloestCentroid(dataset[i,:-1],middle)#找出各个点距离最近的中心点,将中心点的标签赋予当前点
def getLabelFromCloestCentroid(datasetRow,middle):label = middle[0,-1]minDist = np.linalg.norm(datasetRow - middle[0,:-1])#np.linalg.norm(a-b)用来计算a,b两点之间的距离,a.b如果是list,必须要np.array(a)进行格式转换for i in range(1,middle.shape[0]):dist = np.linalg.norm(datasetRow - middle[i,:-1])if dist < minDist:minDist = distlabel = middle[i,-1]print('minDist',minDist)print('label',label)return labeldef getmiddles(datatset,k):result = np.zeros((k,datatset.shape[1]))for i in range(1,k+1):oneCluster = datatset[datatset[:,-1]==i,:-1]result[i-1,:-1] = np.mean(oneCluster,axis=0)result[i-1,-1] = ireturn resultfile = open(r'全部点云数据.csv','r')
reader = csv.reader(file)
reader = list(reader)
m,n = np.shape(reader)
for i in range(0,m):for j in range(0,3):#转换数据类型reader[i][j] = float(reader[i][j])
m,n = np.shape(reader)
list1 = np.zeros([m,2])
for i in range(0,m):for j in range(2,4):#获取数据的z指与强度值list1[i][j-2] = reader[i][j]# x = np.vstack((a,b,c,d))
result = kmean(list1,3,10)
print('result:',result[0])
print(reader[0])
reader0 = np.zeros([m,5])
for i in range(0,m):for j in range(0,4):reader0[i][j] = reader[i][j]
for i in range(0,m):reader0[i][-1] = int(result[i][-1])
print(reader0)w1=open("1.txt","w")
w2=open("2.txt","w")
w3=open("3.txt","w")
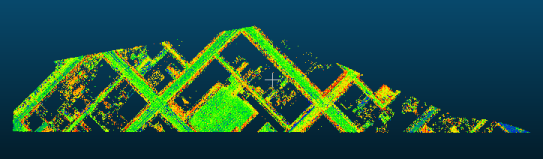
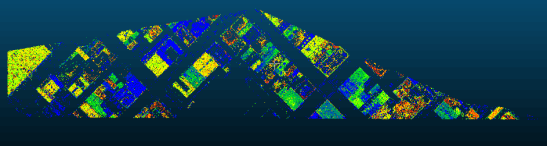
w4=open("4.txt","w")for i in range(m):if(reader0[i][-1]==1):w1.write("%s %s %s %s\n"%(reader0[i][0],reader0[i][1],reader0[i][2],reader0[i][3]))if(reader0[i][-1]==2):w2.write("%s %s %s %s\n" % (reader0[i][0], reader0[i][1], reader0[i][2],reader0[i][3]))if (reader0[i][-1] ==3):w3.write("%s %s %s %s\n" % (reader0[i][0], reader0[i][1], reader0[i][2],reader0[i][3]))if (reader0[i][-1] == 4):w4.write("%s %s %s %s\n" % (reader0[i][0], reader0[i][1], reader0[i][2],reader0[i][3]))以上代码将k值设置为4,也就是将点云聚成4类。输出为4个txt数据,加载进软件,效果图如下,分别是提取的道路,建筑物:
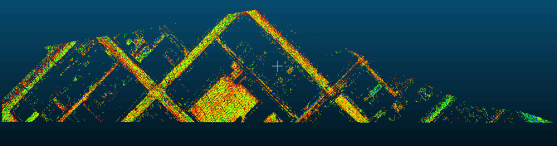
还是利用上述代码,将道路数据放进代码,将K设置为2,可以将道路数据聚类为两类,提取出道路的主干和边界:
PS:附上数据链接 https://download.csdn.net/download/qq_39343904/10863193
这篇关于机器学习之利用k-means算法对点云数据进行目标分割,提取其中的建筑物、房屋等的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!



