本文主要是介绍基于matlab点云工具箱对点云进行处理二:对点云进行欧式聚类,获得聚类后点云簇的外接矩形,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
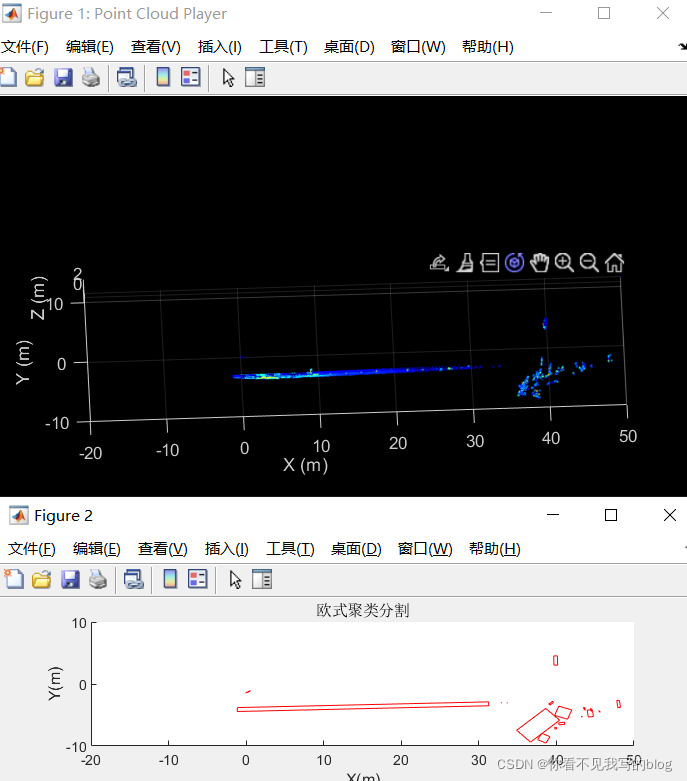
基于matlab点云工具箱对点云进行处理二:对点云进行欧式聚类,获得聚类后点云簇的外接矩形
步骤:
- 读取velodyne数据包pcap文件内的点云数据
- 使用pcdownsample函数对点云数据进行体素化采样,减少点云数量
- 使用find函数对点云进行筛选
- 使用pcdnoise去除点云内的噪声
- 使用pcsegdist进行欧式聚类
- 使用自定义函数getBoundary获得外接矩形,函数具体定义见附件
相关程序点这里https://download.csdn.net/download/rmrgjxeivt/59555459
存在的问题:
大型物体(例如花坛、弯曲的道路护栏等)容易被识别成为一个巨型矩形框。属于严重的错误识别。
基于matlab点云工具箱对点云进行处理一:去除地面,保留剩下的点https://blog.csdn.net/rmrgjxeivt/article/details/121830344
基于matlab点云工具箱对点云进行处理二:对点云进行欧式聚类,获得聚类后点云簇的外接矩形https://blog.csdn.net/rmrgjxeivt/article/details/121830919
基于matlab点云工具箱对点云进行处理三:对点云进行欧式聚类,使用三角剖分处理后获取点云簇的外接凸多边形https://blog.csdn.net/rmrgjxeivt/article/details/121831507
基于matlab点云工具箱对点云进行处理四:对点云进行欧式聚类,并获得包围点云簇的外接凹多边形https://blog.csdn.net/rmrgjxeivt/article/details/121831934

% 读取激光的PCAP文件
% 筛选感兴趣区域
% 播放筛选后的点云veloReader = velodyneFileReader('2021-11-23-12-49-43_Velodyne-HDL-32-Data.pcap','VLP32c');%% 设置感兴趣区域vehPara.length = 5.5;
vehPara.width = 2.2;
vehPara.d = 2.3; % 轴距
vehPara.rearOverhang = 1; % 前悬
vehPara.rearOverhang = 1; % 后悬
vehPara.CG2Rear = 1.45; % 质心到后轴insRegion = [-20 50 -10 10 0 2]; % 感兴趣区域[minX maxX minY maxY]
groundRegion = [-1, 0.2]; % 地面区域,z轴方向xLimits = [insRegion(1), insRegion(2)];
yLimits = [insRegion(3), insRegion(4)];
zLimits = [insRegion(5), insRegion(6)]; % 原点在后轴中心,因此此处相对于轮芯高度player = pcplayer(xLimits,yLimits,zLimits);xlabel(player.Axes,'X (m)');
ylabel(player.Axes,'Y (m)');
zlabel(player.Axes,'Z (m)');veloReader.CurrentTime = veloReader.StartTime + seconds(0.3);disp(['frame数量',num2str(veloReader.NumberOfFrames)])pause(2)frameID = 1000;while(hasFrame(veloReader) && player.isOpen() && (veloReader.CurrentTime < veloReader.EndTime))ptCloudObj = readFrame(veloReader,frameID);frameIDticlidarLo = [3.5 0 1.1 0 0 0];% 取出XYZxTemp = ptCloudObj.Location(:,:,2)+lidarLo(1);yTemp = -ptCloudObj.Location(:,:,1)+lidarLo(2);zTemp = ptCloudObj.Location(:,:,3)+lidarLo(3);pc = [xTemp(:) yTemp(:) zTemp(:) single(ptCloudObj.Intensity(:))];% max(pc(:,1))% min(pc(:,1))% max(pc(:,2))% 对地面的点进行范围筛选zMin = groundRegion(1);zMax = groundRegion(2);pcObj = pointCloud(pc(:,1:3));pcObj.Intensity = pc(:,4);pcOutNum = 30000; % 输出的点云数量objPointVeh = zeros(pcOutNum,4,'single');objPointVeh(:,1) = single(insRegion(2));objPointVeh(:,2) = single(insRegion(4));objPointVeh(:,3) = single(insRegion(6));objPointVeh(:,4) = single(0);% tic%% 降低点云密度 coder会报错gridStep = 0.03;pcObj_downSample = pcdownsample(pcObj,'gridAverage',gridStep); % 降低点云密度% maxNumPoints = 6;% pcObj_downSample = pcdownsample(pcObj,'nonuniformGridSample',maxNumPoints);% percentage = 0.3;% pcObj_downSample = pcdownsample(pcObj,'random',percentage);%% 筛选感兴趣区域(单位米),并排除车身内部的点云xLimits = [insRegion(1), insRegion(2)];yLimits = [insRegion(3), insRegion(4)];zLimits = [insRegion(5), insRegion(6)]; % 原点在后轴中心,因此此处相对于轮芯高度indices = find((pcObj_downSample.Location(:, 2) >= yLimits(1) ...& pcObj_downSample.Location(:,2) <= yLimits(2) ...& pcObj_downSample.Location(:,1) >= xLimits(1) ...& pcObj_downSample.Location(:,1) <= xLimits(2) ...& pcObj_downSample.Location(:,3) <= zLimits(2) ...& pcObj_downSample.Location(:,3) >= zLimits(1) ...& ~(pcObj_downSample.Location(:,1)<(vehPara.length-vehPara.rearOverhang) ...& pcObj_downSample.Location(:,1)>(-vehPara.rearOverhang) ...& pcObj_downSample.Location(:,2)<vehPara.width/2 ...& pcObj_downSample.Location(:,2)>-vehPara.width/2)));% 设置感兴趣的点云区域if ~isempty(indices)pcObj_downSample = select(pcObj_downSample,indices);%% 去除噪声[pcObj_downSample,inlierIndices,~] = pcdenoise(pcObj_downSample);pcID_noNoise = 1:1:pcObj_downSample.Count;if ~isempty(inlierIndices)outlierIndices = [];if ~isempty(outlierIndices) % 非空才输出pcRemainObj = select(pcObj_downSample,pcID_out);elsepcRemainObj = pcObj_downSample;endelsepcRemainObj = pcObj_downSample;endcowPCRemain = size(pcRemainObj.Location)*[1;0];if cowPCRemain>pcOutNumcowPCRemain = pcOutNum;endobjPointVeh(1:cowPCRemain,:) = [pcRemainObj.Location pcRemainObj.Intensity];% pcRemainObj = pcObj;% cowPCRemain = size(pcRemainObj.Location)*[1;0];% objPointVeh(1:cowPCRemain,:) = pcRemainObj.Location;end% end%% 欧式聚类% 最小聚类欧式距离minDist = 0.7;% 执行欧式聚类分割[labels,numClusters] = pcsegdist(pcRemainObj,minDist);% 显示分割结果hsvColorMap = hsv(numClusters);hsvColorMap_H = hsvColorMap(:,1);hsvColorMap_S = hsvColorMap(:,2);hsvColorMap_V = hsvColorMap(:,3);
% view(player,pcRemainObj.Location,[hsvColorMap_H(labels) hsvColorMap_S(labels) hsvColorMap_V(labels)]);% pcshow(pcRemainObj.Location,labels);% colormap(hsv(numClusters));% 遍历所有聚类结果figure(2);% subplot(2,1,2)clfaxis([insRegion(1) insRegion(2) insRegion(3) insRegion(4)])title('欧式聚类分割');xlabel('X(m)');ylabel('Y(m)');zlabel('Z(m)');hold on;for i = 1:1:numClusterspcClusterObjTemp = select(pcRemainObj,find(labels == i));pbar = getBoundary(pcClusterObjTemp.Location);plot([pbar(:,1); pbar(1,1)],[pbar(:,2); pbar(1,2)],'r')endhold offobjVehPoint = objPointVeh;%%pcObjOut = pointCloud(objVehPoint(:,1:3));pcObjOut.Intensity = objVehPoint(:,4);frameID = frameID+1;tocview(player,pcObjOut);pause(0.02);end
% end
function [pbar] = getBoundary(pcCluster)if length(pcCluster(:,1))>=3ind = convhull(double(pcCluster(:,1)),double(pcCluster(:,2)));pcNum = length(ind);hull = pcCluster(ind,1:2); %随机点凸包area = inf;for i = 2:pcNump1 = hull(i-1,:); %凸包上两个点p2 = hull(i,:);k1 = (p1(2)-p2(2))/(p1(1)-p2(1)); %连接两点的直线,作为矩形的一条边b1 = p1(2)-k1*p1(1);d = abs(hull(:,1)*k1-hull(:,2)+b1)/sqrt(k1^2+1); %所有凸包上的点到k1,b1直线的距离[h, ind] = max(d); %得到距离最大的点距离,即为高,同时得到该点坐标b2 = hull(ind,2)-k1*hull(ind,1); %相对k1,b1直线相对的另一条平行边k1,b2;k2 = -1/k1; %以求得的直线的垂线斜率b = hull(:,2)-k2*hull(:,1); %过凸包所有点构成的k2,b直线系x1 = -(b1-b)/(k1-k2); %凸包上所有点在已求得的第一条边的投影y1 = -(-b*k1+b1*k2)/(k1-k2);x2 = -(b2-b)/(k1-k2); %凸包上所有点在已求得的第二条边的投影y2 = -(-b*k1+b2*k2)/(k1-k2);[~, indmax1] = max(x1); %投影在第一条边上x方向最大与最小值[~, indmin1] = min(x1);[~, indmax2] = max(x2); %投影在第二条边上x方向最大与最小值[~, indmin2] = min(x2);w = sqrt((x1(indmax1)-x1(indmin1))^2+(y1(indmax1)-y1(indmin1))^2); %矩形的宽if area >= h*w %使面积最小area = h*w;pbar = [x1(indmax1) y1(indmax1); %矩形四个角点x2(indmax2) y2(indmax2);x2(indmin2) y2(indmin2);x1(indmin1) y1(indmin1)];endend% pbar(5,:) = pbar(1,:);
endif length(pcCluster(:,1))==2 % 只含两个点的情况hull = pcCluster(:,1:2);pbar = [pcCluster(1,1) pcCluster(1,2);pcCluster(2,1) pcCluster(2,2);pcCluster(2,1)+0.05 pcCluster(2,2)+0.05;pcCluster(1,1)+0.05 pcCluster(1,2)+0.05;];
endif length(pcCluster(:,1))==1 % 只含一个点的情况hull = pcCluster(:,1:2);pbar = [pcCluster(1,1) pcCluster(1,2);pcCluster(1,1)+0.05 pcCluster(1,2);pcCluster(1,1)+0.05 pcCluster(1,2)+0.05;pcCluster(1,1) pcCluster(1,2)+0.05;];
end% figure(2)
% plot(hull(:,1),hull(:,2),'.');
% hold on;
% plot([pbar(:,1); pbar(1,1)],[pbar(:,2); pbar(1,2)],'r')
% axis equal;
% hold offend
这篇关于基于matlab点云工具箱对点云进行处理二:对点云进行欧式聚类,获得聚类后点云簇的外接矩形的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!







