本文主要是介绍基于matlab点云工具箱对点云进行处理一:去除地面,保留剩下的点,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
基于matlab点云工具箱的点云地面分割(去除地面,保留剩下的点)
步骤:
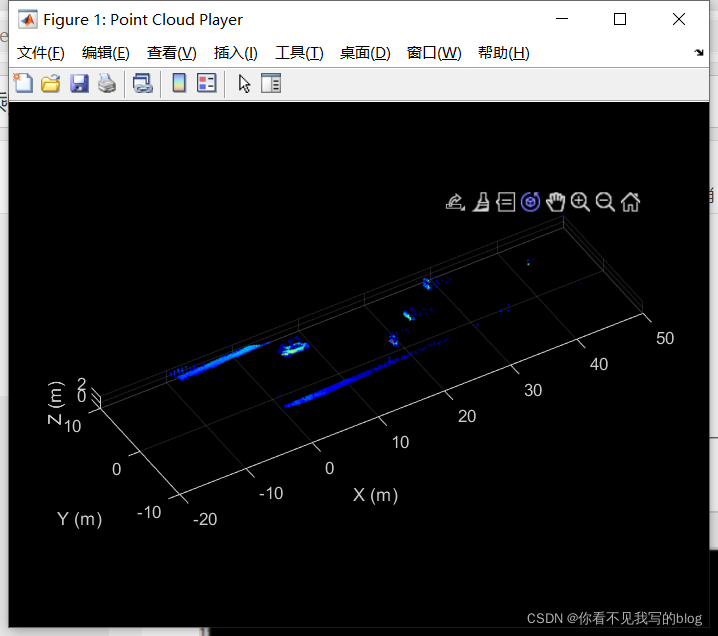
- 读取velodyne数据包pcap文件内的点云数据
- 使用pcdownsample函数对点云数据进行体素化采样,减少点云数量
- 使用find函数对点云进行筛选
- 使用pcdnoise去除点云内的噪声
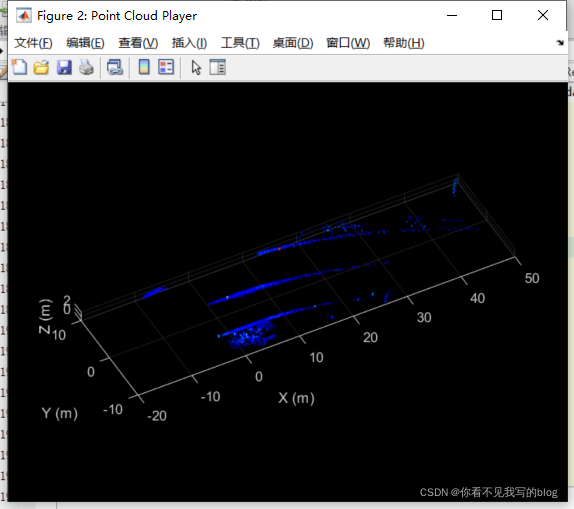
- 筛选低点的点云(地面一般较低)
- 使用pcfitplane函数匹配平面(地面)
- 输出
相关文件点我下载https://download.csdn.net/download/rmrgjxeivt/59553218
基于matlab点云工具箱对点云进行处理一:去除地面,保留剩下的点https://blog.csdn.net/rmrgjxeivt/article/details/121830344
基于matlab点云工具箱对点云进行处理二:对点云进行欧式聚类,获得聚类后点云簇的外接矩形https://blog.csdn.net/rmrgjxeivt/article/details/121830919
基于matlab点云工具箱对点云进行处理三:对点云进行欧式聚类,使用三角剖分处理后获取点云簇的外接凸多边形https://blog.csdn.net/rmrgjxeivt/article/details/121831507
基于matlab点云工具箱对点云进行处理四:对点云进行欧式聚类,并获得包围点云簇的外接凹多边形https://blog.csdn.net/rmrgjxeivt/article/details/121831934
% 读取激光的PCAP文件
% 筛选感兴趣区域
% 播放筛选后的点云veloReader = velodyneFileReader('2021-11-23-12-49-43_Velodyne-HDL-32-Data.pcap','VLP32c');%% 设置感兴趣区域vehPara.length = 5.5;
vehPara.width = 2.2;
vehPara.d = 2.3; % 轴距
vehPara.rearOverhang = 1; % 前悬
vehPara.rearOverhang = 1; % 后悬
vehPara.CG2Rear = 1.45; % 质心到后轴insRegion = [-20 50 -10 10 0 2]; % 感兴趣区域[minX maxX minY maxY]
groundRegion = [-1, 0.2]; % 地面区域,z轴方向xLimits = [insRegion(1), insRegion(2)];
yLimits = [insRegion(3), insRegion(4)];
zLimits = [insRegion(5), insRegion(6)]; % 原点在后轴中心,因此此处相对于轮芯高度player = pcplayer(xLimits,yLimits,zLimits);xlabel(player.Axes,'X (m)');
ylabel(player.Axes,'Y (m)');
zlabel(player.Axes,'Z (m)');veloReader.CurrentTime = veloReader.StartTime + seconds(0.3);disp(['frame数量',num2str(veloReader.NumberOfFrames)])pause(2)frameID = 2700;while(hasFrame(veloReader) && player.isOpen() && (veloReader.CurrentTime < veloReader.EndTime))
ptCloudObj = readFrame(veloReader,frameID);
frameIDtic
lidarLo = [3.5 0 1.1 0 0 0];% 取出XYZ
xTemp = ptCloudObj.Location(:,:,2)+lidarLo(1);
yTemp = -ptCloudObj.Location(:,:,1)+lidarLo(2);
zTemp = ptCloudObj.Location(:,:,3)+lidarLo(3);pc = [xTemp(:) yTemp(:) zTemp(:) single(ptCloudObj.Intensity(:))];% 对地面的点进行范围筛选
zMin = groundRegion(1);
zMax = groundRegion(2);pcObj = pointCloud(pc(:,1:3));
pcObj.Intensity = pc(:,4);pcOutNum = 30000; % 输出的点云数量objPointVeh = zeros(pcOutNum,4,'single');
objPointVeh(:,1) = single(insRegion(2));
objPointVeh(:,2) = single(insRegion(4));
objPointVeh(:,3) = single(insRegion(6));
objPointVeh(:,4) = single(0);% tic
%% 降低点云密度 coder会报错
% gridStep = 0.05;
% pcObj_downSample = pcdownsample(pcObj,'gridAverage',gridStep); % 降低点云密度maxNumPoints = 6;
pcObj_downSample = pcdownsample(pcObj,'nonuniformGridSample',maxNumPoints);% percentage = 0.3;
% pcObj_downSample = pcdownsample(pcObj,'random',percentage);%% 筛选感兴趣区域(单位米),并排除车身内部的点云
xLimits = [insRegion(1), insRegion(2)];
yLimits = [insRegion(3), insRegion(4)];
zLimits = [insRegion(5), insRegion(6)]; % 原点在后轴中心,因此此处相对于轮芯高度indices = find((pcObj_downSample.Location(:, 2) >= yLimits(1) ...& pcObj_downSample.Location(:,2) <= yLimits(2) ...& pcObj_downSample.Location(:,1) >= xLimits(1) ...& pcObj_downSample.Location(:,1) <= xLimits(2) ...& pcObj_downSample.Location(:,3) <= zLimits(2) ...& pcObj_downSample.Location(:,3) >= zLimits(1) ...& ~(pcObj_downSample.Location(:,1)<(vehPara.length-vehPara.rearOverhang) ...& pcObj_downSample.Location(:,1)>(-vehPara.rearOverhang) ...& pcObj_downSample.Location(:,2)<vehPara.width/2 ...& pcObj_downSample.Location(:,2)>-vehPara.width/2)));% 设置感兴趣的点云区域if ~isempty(indices)pcObj_downSample = select(pcObj_downSample,indices);%% 去除噪声[pcObj_downSample,inlierIndices,~] = pcdenoise(pcObj_downSample);pcID_noNoise = 1:1:pcObj_downSample.Count;if ~isempty(inlierIndices)% 分离出地面% Set the maximum point-to-plane distance (2cm) for plane fitting.maxDistance = 0.2;% Set the normal vector of the plane.referenceVector = [0,0,1];% Set the maximum angular distance to 5 degrees.maxAngularDistance = 10;% 筛选出较低的点用于去除地面(地面较低)% 只对范围内的点进行平面拟合(很低的那一部分点)indices = find((pcObj_downSample.Location(:, 3) >= zMin ...& pcObj_downSample.Location(:, 3) <= zMax));if ~isempty(indices)pcObj_lier = select(pcObj_downSample,indices);pcID_lier = pcID_noNoise(indices);% Detect the first plane, the table, and extract it from the point cloud.% 输出不是地面的点[~,inlierIndices,outlierIndices] = pcfitplane(pcObj_lier,maxDistance,referenceVector,maxAngularDistance);pcID_outlier = pcID_lier(outlierIndices); % 不是地面的点的IDpcID_inlier = pcID_lier(inlierIndices); % 是地面的点的ID% 从点云中删除属于地面的点,获得过滤后的点云pcID_out = pcID_noNoise;pcID_out(pcID_inlier) = [];% outlierIndices = [];if ~isempty(outlierIndices) % 非空才输出pcRemainObj = select(pcObj_downSample,pcID_out);elsepcRemainObj = pcObj_downSample;endelsepcRemainObj = pcObj_downSample;endcowPCRemain = size(pcRemainObj.Location)*[1;0];if cowPCRemain>pcOutNumcowPCRemain = pcOutNum;endobjPointVeh(1:cowPCRemain,:) = [pcRemainObj.Location pcRemainObj.Intensity];% pcRemainObj = pcObj;% cowPCRemain = size(pcRemainObj.Location)*[1;0];% objPointVeh(1:cowPCRemain,:) = pcRemainObj.Location;end
end% figure(2)
% % pcshow(plane1)
% pcshow(pcPlanel)
% title('First Plane')% cowPCRemain = length(pcObj.Location(:,1));
% pcRemain(1:cowPCRemain,:) = pcObj.Location;% figure(3)
% % pcshow(plane1)
% pcshow(pcRemain)
% title('remainPtCloud')objVehPoint = objPointVeh;
%%
pcObjOut = pointCloud(objVehPoint(:,1:3));
pcObjOut.Intensity = objVehPoint(:,4);frameID = frameID+1;tocview(player,pcObjOut);pause(0.02);end这篇关于基于matlab点云工具箱对点云进行处理一:去除地面,保留剩下的点的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!




