太极拳专题

网友称神仙申遗 谋定论道·国情讲坛:张三丰太极拳申遗
网友称神仙申遗 谋定论道·国情讲坛:张三丰太极拳申遗 陈向武 观察者网 新闻中国采编网中国新闻采编网 中国企业家手机报 谋定研究中国智库网 国研智库 国情讲坛 商协社团 谋定论道 经信研究 哲商对话 万赢信采编: 陈氏太极宗师陈向武联名驳斥“张三丰太极拳申遗”见面会 ”近日,针对福建申报的“张三丰太极拳”入选新一批国家级非物质文化遗产推荐(扩展项目)名录一事,在网上乃至武
(个人)实时交互的太极拳学习系统创新实训第八周(二)
本周工作 把之前的语音监听功能做好之后,我把背景乐与太极拳音乐加入到系统中。 将音乐与招式一一对应,使得在播放标准动作的同时播放改招式的背景音乐。 协助组员测试系统。因为我们需要穿上动捕设备带上头盔,所以在测试的时候一个人做起来比较麻烦。
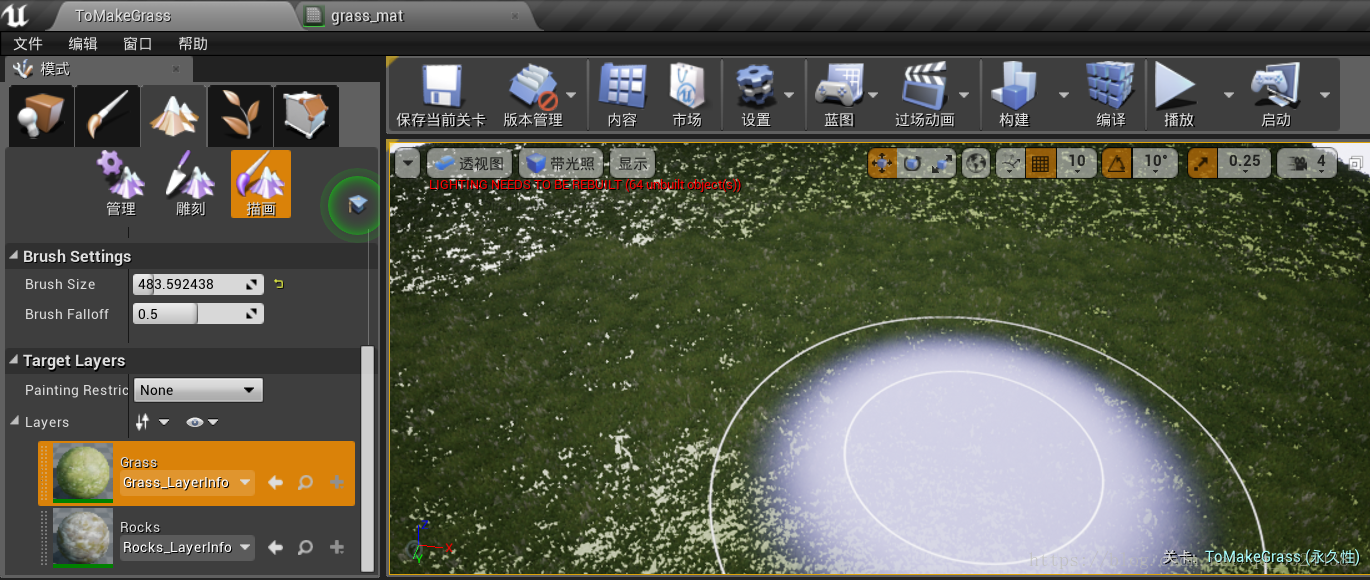
(个人)实时交互的太极拳学习系统创新实训第十周(一)
制作草地材质 创建一个地貌草地类型,Grass Mesh选择植被类型,Grass Density 可以调节植被的疏密程度。 新建一个材质,使用Landscape LayerBlend 来混合两种材质。 创建地貌,描画 用笔刷在地貌上涂抹

(个人)实时交互的太极拳学习系统创新实训第四周
不同招式不同部位的容错率 杨氏太极拳24式,不同招式动作对身体各个部位的容错率要求也不同,评估系统要灵活的评估。于是我对着教学视频把每一招式不同部位的容错率进行标注。 第一式:起势 【容错率高】手、臂 【容错率低】头、躯干、腿、脚 第二式:左右野马分鬃 【高】手、臂、腿、脚 【低】头、躯干 第三式:白鹤亮翅 【高】 手、臂、

(个人)太极拳学习系统创新实训第三周(二)
本周任务: 这次我将主要介绍基于Unreal Engine 4的VR项目实现VR交互,因为我已经实现了右手分离,我将完成右手部分的蓝图。 添加右手手柄: 现在左右手柄已经分离,并且MotionControllerPawn中右手部分的蓝图被删除,右手手柄不能运作。为了能够使右手手柄发挥作用要新建一个右手的蓝图,然后为这个蓝图添加函数和事件。 创建右手的蓝图: 在“添加新项”->“蓝图类”中
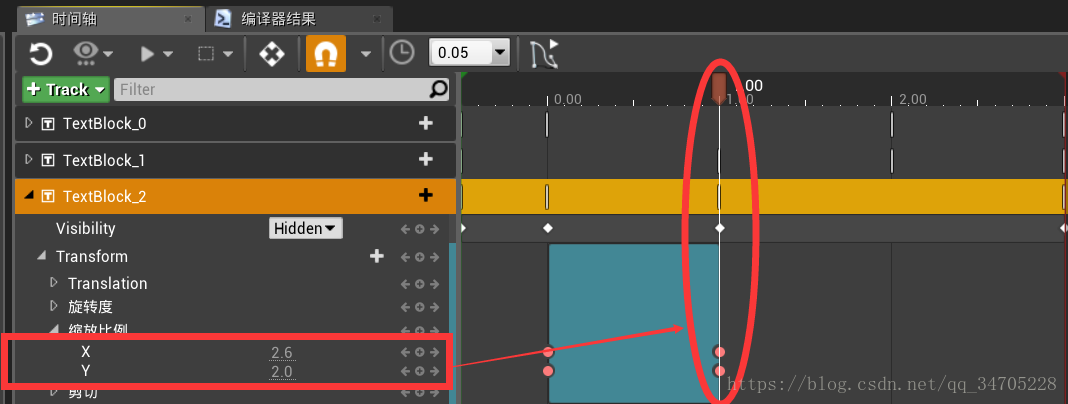
(个人)太极拳学习系统创新实训第六周(一)
倒计时:在ue4中制作一个动画并通过实现蓝图使其播放出来。 层次结构:添加三个"Text"文本框,改变文本框文本内容。 将三个文本框移动到相同的位置。 给文本框添加动画: 添加动画并命名为"countdown" 选择需要添加运动轨迹的控件,因为要制作的是倒计时“3,2,1”因此需要改变文本框的轨迹。 选择了三个文本框

(个人)太极拳学习系统创新实训第四周(一)
本周任务: 本周我的任务首先是继续上周的工作完成 Unreal Engine的交互,然后设计出基于Unreal Engine的UMG并学习如何优化ui设计。 我要完成“主菜单”“太极拳项目介绍”“说明”等多个界面设计以及界面交互。 主菜单:首先创建一个蓝图控件,然后添加组件。 其中层次结构包括一个背景图片,一个独立的"Text"文本框和一个垂直的层次结构"

(个人)太极拳学习系统创新实训第十一周总结
工作总结: 这是一个基于人机交互的VR模式下的太极拳学习系统,因此交互体验显得尤为重要。为了让用户有更好的交互体验,我做了很多工作和尝试,我一共完成了两种交互方式,两种类型的界面交互,三种用户界面,比较总结选择对用户最友好的方式。 在参与实训项目之前我对UE4零基础,所以对我来说这是一个,在学习中实践,在实践中学习的过程。 基于时间线工作总结: 参与阅读论文,选择动作匹配的算法和在

(个人)VR太极拳学习系统-创新实训第六周(2)
DTWRecorderComponent实现改进 上一篇博客中我使用蓝图实现了DTWRecorderComponent用来记录每一帧的骨骼位置,但是有一个很难受的问题就是需要做大量的重复工作,上一篇博客中我还只记录了13根骨骼,而实际上要记录的还不止这么多,没多一个骨骼,就要写许多重复的代码,效率十分低下,蓝图也变得十分庞大杂乱。 经过其他组员的提醒,我学到了一个比较trick的方法,就是先建


(个人)太极拳学习系统创新实训第九周(一)
本周任务: 本周我的主要任务是将手部射线改为头盔发射射线,并增加详细成绩菜单,更新界面中的成绩以及用Sence Capture 2D捕获屏幕中的信息。 使用头盔发射射线: 因为在上一周我完成了从手部发射出射线,但是因为需要多导入一个模型,而使用头盔发射射线就以避免这种情况。 在相机的下面添加组件“WidgetInteraction” 添加详细成绩菜单:
(个人)VR实时交互的太极拳学习系统创新实训第七周(1)
本周开始项目的合成工作。 以下是在合成的过程中解决的一个问题: 在进行start场景的播放时,发现出现了问题。在进行视频的播放时,发现在VIVE的头盔中,只显示了局部内容。但是在普通模式的预览下,视频显示是并没有问题的。 1.最开始以为是锚点没有固定好的问题,于是就是控件蓝图中重新固定了锚点。将锚点固定在中心的位置。 但是发现还是没有解决这个问题。在网上查找教程,但是并没有直

(个人)太极拳学习系统创新实训第七周
一、继续完善实时学习模式 a)通过正确时间除以总时间得出各关节百分制分数,再平均得出总分数。 b) 之前使用锁定HMD的方式防止学习时因为动作的转向而看不到老师与自身的实时动作,但是这个方法使用起来有略微的眩晕感,如果将模型与主视角进行一个相对位置的锁定,及模型随着使用者的转动而转动,又会因为线速度太快产生模糊重影。因此我用了一个笨一点的办法,将原模型复制三份,
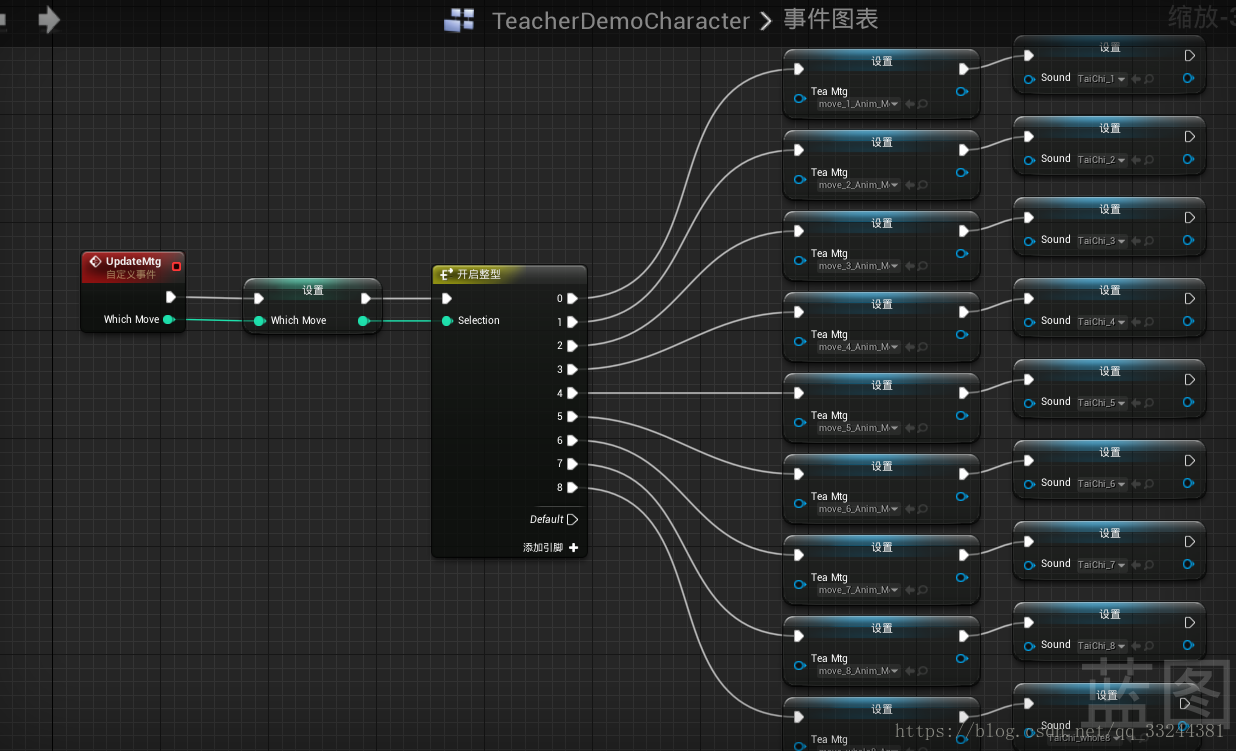
(个人)VR实时交互的太极拳学习系统创新实训第八周
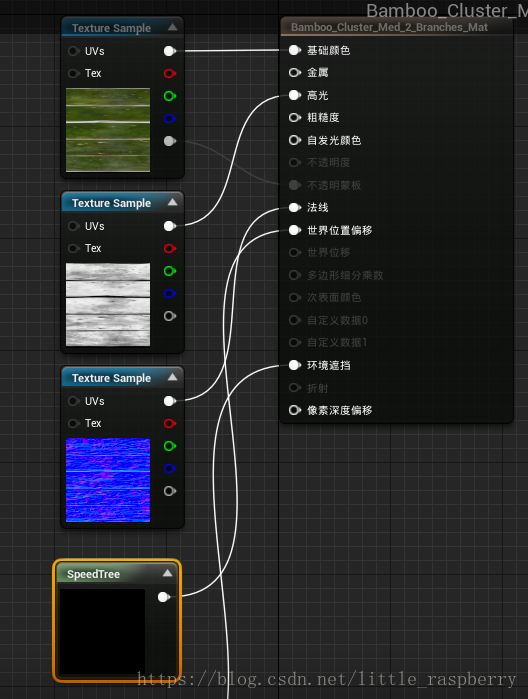
本周主要进行了一些细节的完善。 1.移动系统的激活的控制。在观赏模式下,发现如果控制移动的发那个发始终存在时,会影响用户的体验。因此通过触摸肩膀进行开启和关闭操作。 2.将上周重新记录的动作制作为montage,然后重新制作动画蓝图。通过数据决定需要播放哪一段动画。 3.学习使用了speedTree,制作树模型。 将制作好的模型导出,可以直接得到一系列文件,其中.srt

(个人)VR实时交互的太极拳学习系统创新实训第九周
本周的主要工作还是调试bug。 王轲将全部的关卡调整成了sub关卡模式。 关于线条整理的问题: 在studentcharacter中,由于反复使用到HMDLocomotion中的中的变量和函数,而我以前的连线方式非常嘈杂。这样很不美观,在王老师的建议下,将HMDL提升为一个索引,这样就可以直接赋值实例化,然后使用这样可以使整个蓝图比较干净整洁。 已经解决了VR模式下UI的问题,但是
