之点专题

Lua面向对象编程之点与冒号的差异比较
从一段代码开始 代码 1-1: Class = {}-- Class.__index = Classfunction Class:new(x,y)local temp = {}setmetatable(temp, {__index = Class})-- setmetatable(temp, Class)temp.x = xtemp.y = yreturn tempendfunction
ArcGIS JavaScript 4.x之点生成矩形缓冲区
记录自己用ArcGIS JavaScript 4.x实现以点(Point)为中心生成任意长宽的矩形缓冲区的效果。关键是通过中心点坐标,长,宽作为条件计算出各顶点坐标来绘制出一个类型为矩形多边形(polygon)的图形。下图是演示效果: 绘制矩形缓冲相关代码: /*** 绘制长方形缓冲的方法* 中心点-[lon,lat]* 长-width* 宽-height */function getR
CloudCompare插件开发之点云如何创建、保存并显示?
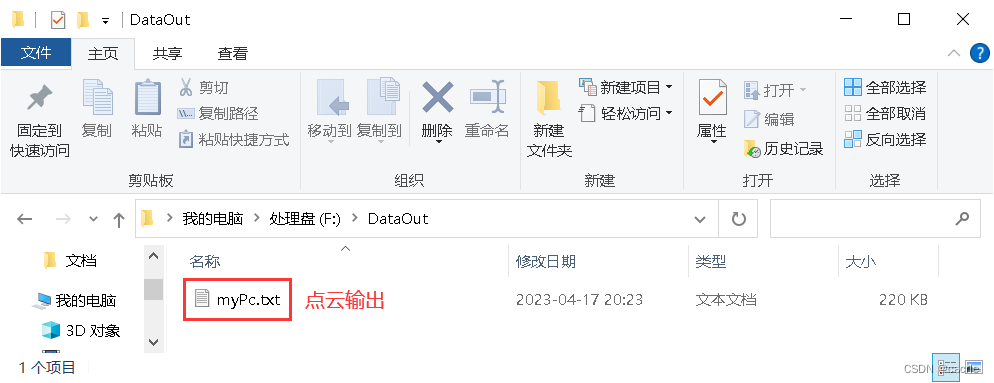
文章目录 0.引言1.创建插件工程2.代码编写3.显示点云4.保存点云 0.引言 CloudCompaer是一款优秀的开源软件,在点云处理时可以根据实际要求开发合适的插件,在实际使用中,创建点云、保存点云、显示点云的操作较为基础,为了使这些操作得到总结,本文实现创建点云、保存并显示。 1.创建插件工程 创建插件流程见:CloudCompare如何进行二次开发之插件开发

Android自定义View之点赞撒花(三阶贝塞尔曲线应用)
前言 本文参考辉哥的贝塞尔曲线 - 花束直播点赞效果,是对三阶贝塞尔曲线和对属性动画的运用,十分适合学习自定义View。 最终效果 实现思路 刚开始,爱心位于整个View的最底部中间位置,我们可以继承RelativeLayout并在其底部中间位置添加ImageView,设置ImageView为爱心图片即可;爱心生成时伴随着透明度和放大动画,这个比较简单,通过属性动画实现即可;然后爱心上

【pcl入门教程系列】之点云水平面校准
简介 车载激光雷达传感器生成点云后,需要进行点云水平面校准来纠正由于传感器安装倾斜或者路面颠簸不平导致的扫描生成点云不是水平的,而是带有一定坡度。对水平面点云校准有助于后续对点云进行分割、识别等操作。废话不多说,看下面水平面校准的步骤。 水平面校准 水平面校准主要涉及以下几个步骤: 分割出大致的地面点;通过分割出来的地面点来估计地平面方程 a x + b y + c z + d = 0
PCL点云处理之点云置平(拟合平面绕中心旋转到绝对水平)(二百二十七)
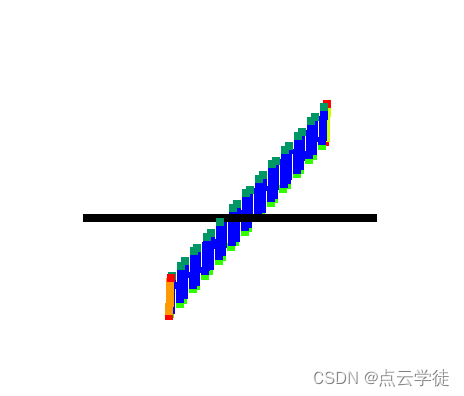
PCL点云处理之点云置平(绕中心旋转到绝对水平)(二百二十七) 一、什么是点云置平二、算法流程三、算法实现 一、什么是点云置平 有时候,我们处理的点云平面并非位于水平面,而是位于某个任一三维平面上,而大多数算法又只能在水平面处理,或者水平面的点云处理是相对更简单的,所以我们需要做下面的这个处理,将点云旋转到绝对水平的位置,简称为点云置平 (有色点云为原始点云,黑色点云为置平后的
android点赞取消赞功能吗,Android view之点赞容易,取消不易
可以去dribbble上看看原生效果。 代码下载 好的app在功能完善的基础上,从细节上吸引用户。虽然点赞这个功能点已经很普遍了,但是千篇一律的生硬效果让这么神圣的操作显得很黯淡(扯淡了,不就是赞赞赞么...),当然也有非常炫酷的,忍不住多点几次赞的效果。比如twitter的点赞。就不码字扯淡了,上图上源码 like.png shot.gif 使用Path画爱心 Path path = ne
计算几何之点操作【模板】
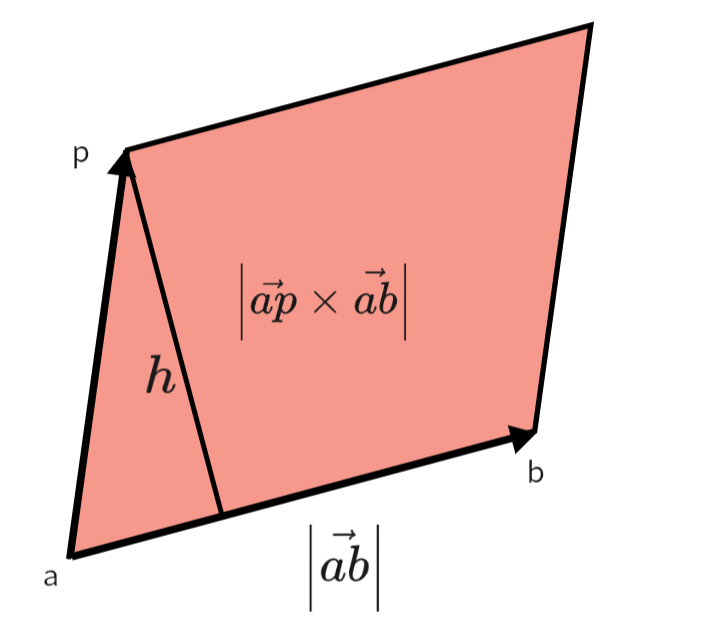
点基本定义 与其说是点,不如说是一个二维向量类的定义,先给出类的完整定义,后文会一一详细介绍 class p {public:ll x, y;//二维向量,表示一个点p(ll _x = 0, ll _y = 0):x(_x),y(_y){}//向量基本运算的实现+ - · *p operator+(const p& a)const { return p{ x + a.x,y + a.y };

【pcl教程系列】之点云目标检测整体流程
点云目标检测概述 之前撰写关于点云的相关算法的博客都是如何有效的去除地面点云,得到非地面点云来为后续的检测识别等操作做铺垫。如果你对地面点去除感兴趣的话,可以参考我的之前一些关于点云分割地面的博客。本篇主要介绍一下,在无人车挂载激光雷达的时候,如何有效的识别障碍物的整体流程?当然,这里主要介绍的是传统算法在无人车上对点云数据的操作,深度学习的点云识别后续有机会再详谈。说实话,传统方式的点云目
PCL点云处理之点云转为Mesh模型并保存---方法一 (二百一十)
PCL点云处理之点云转为Mesh模型并保存---方法一(二百一十) 一、算法简介二、算法实现1.代码2 效果 总结 一、算法简介 PCL提供的possion方法可以将点云重建为Mesh网格模型,并保存为ply格式的文件,使用方法比较简单,总共包括点云法线计算和模型重建两个模块类的使用,下面是具体的代码展示,具体的参数调整需要对源码进行阅读,这里提供的参数基本可以重建,但效果一般