walking专题

uva 825 Walking on the Safe Side(动态规划:记忆化搜索)
题目的输入太蛋疼了... 题目本身倒是不难 代码如下: #include <cstdio>#include <cstring>#include <iostream>#include <algorithm>#define MAXN 1010using namespace std;char str[MAXN];int a[MAXN][MAXN], dp[MAXN][MAXN];i

UVA 10913 - Walking on a Grid (记忆化搜索)
题目链接~~> 做题感悟:开始不用标记数组把 dp 数组初始化一下用于标记但是这样因为初始化的原因就超时了,改为标记数组才过。 解题思路:记忆化搜索 这题很明显,如果用递推的方法的话必定不好写,因为在一行里可以向左做可以向右走,这样就导致不好递推,如果用记忆化方法的话就很好写了,如果单纯的只向右和下的话可以用三维标记 dp[ i ] [ j ] [ k ] (
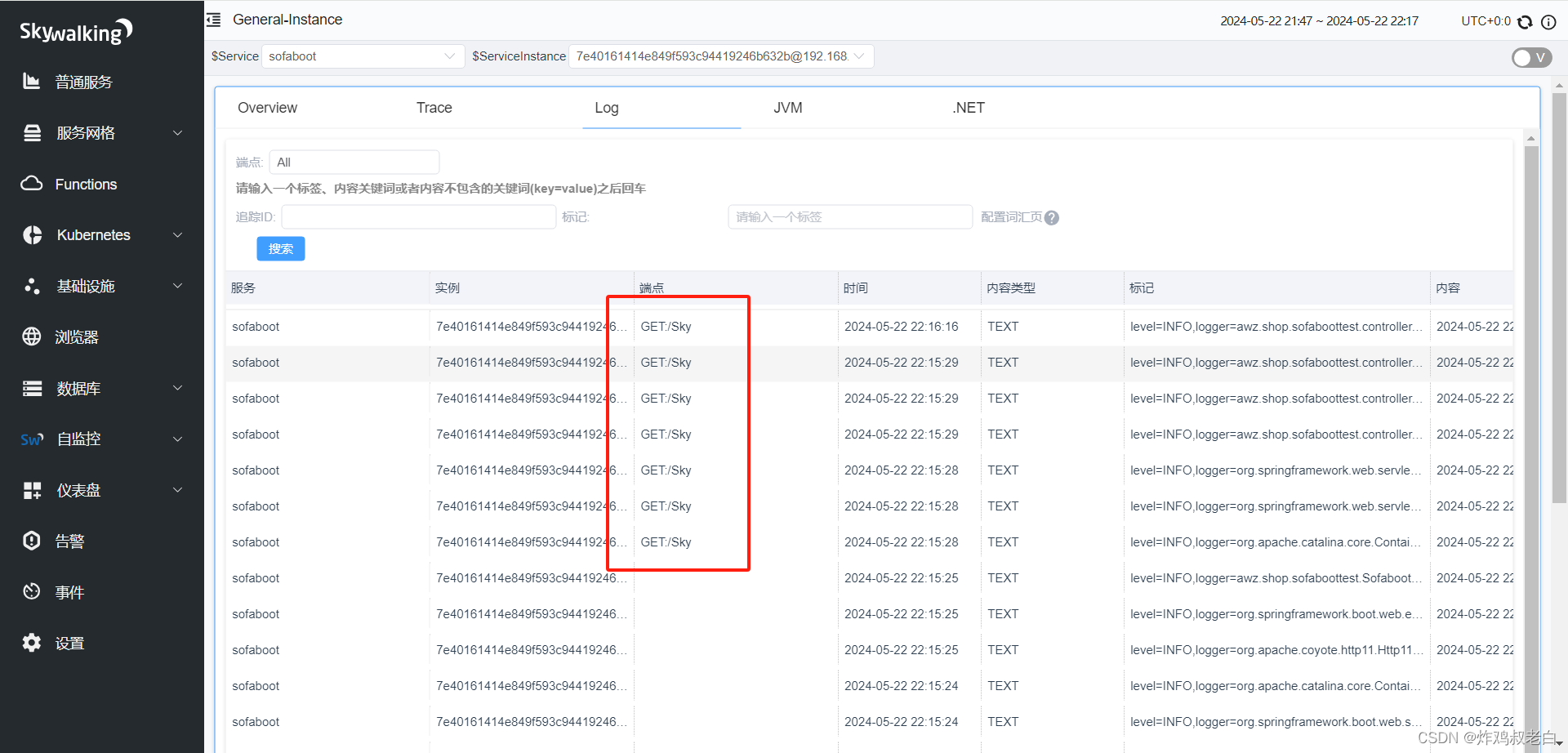
sky walking日志采集以及注意事项
文章目录 1,sky walking日志采集功能概述2,采集log4j2日志3,采集logback日志4,效果展示5,注意事项 1,sky walking日志采集功能概述 在介绍Sky walking日志采集功能之前,最好在系统学习一遍日志框架,这里推荐楠哥的日志框架 在实际项目中我们需要将项目中的日志采集到sky walking中以便于我们能够快速排查问题,sky walkin
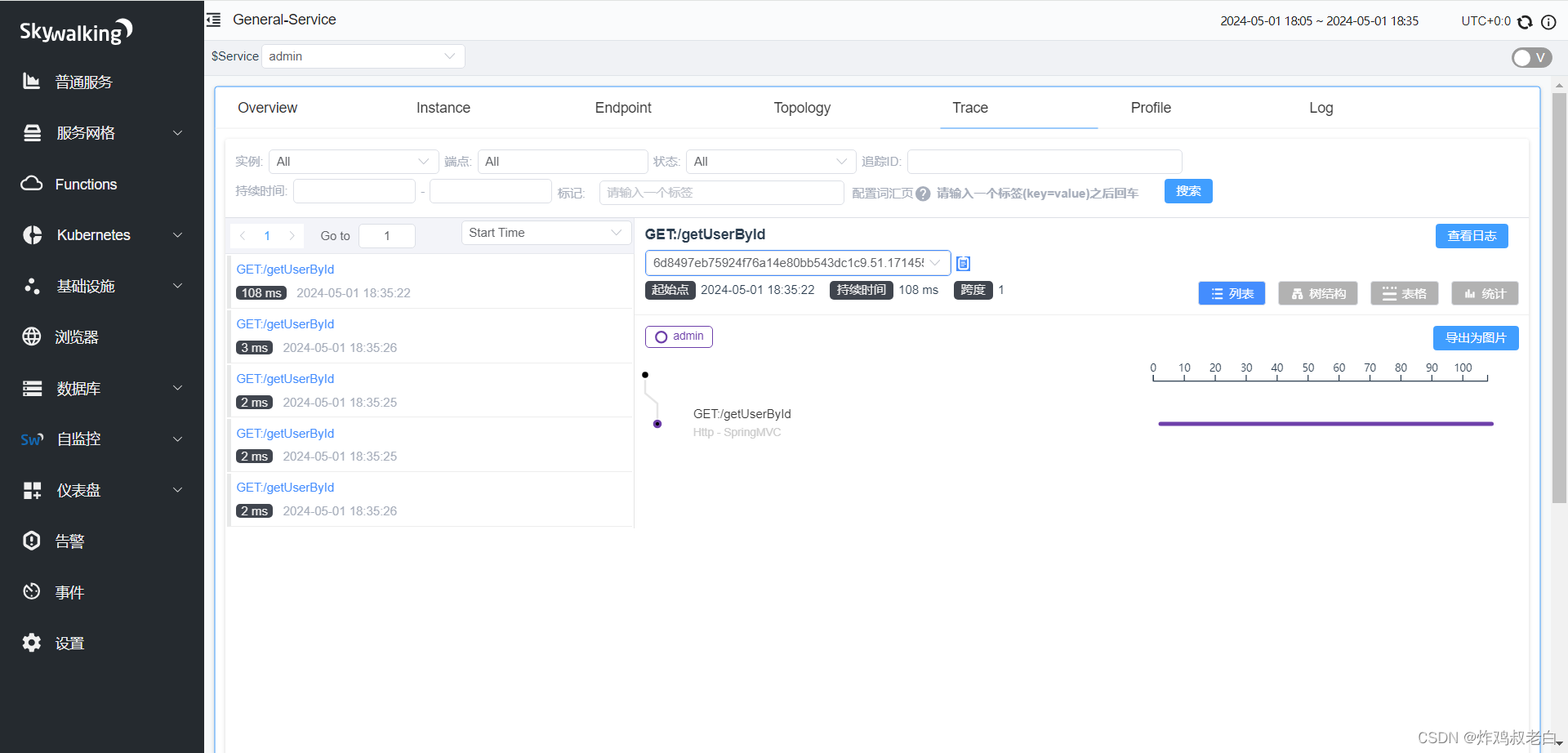
分布式链路追踪工具Sky walking详解
1,为什么要使用分布式链路追踪工具 随着分布式系统和微服务架构的出现,且伴随着用户量的增加,项目的体量变得十分庞大,一次用户请求会经过多个系统,不同服务之间调用关系十分复杂,一旦一个系统出现错误都可能会影响整个请求的处理结果。而因为项目十分庞大,调用链路十分复杂,无法快速定位失败的位置和原因。 除此之外,复杂的分布式系统也面临如下问题: 性能分析:一个服务依赖很多,被依赖的服务也依赖其他服务。
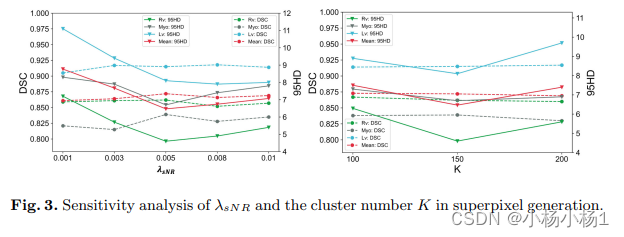
通过超分辨率像素引导的Scribble Walking和逐类对比正则化的弱监督医学图像分割(SC-Ne)论文速读
目录 Weakly Supervised Medical Image Segmentation via Superpixel-Guided Scribble Walking and Class-Wise Contrastive Regularization摘要方法实验结果 Weakly Supervised Medical Image Segmentation via Super

2020小米网络赛第一场 Walking Machine(BFS)
题意: 每个点有一个方向值,代表这个点出发只能走这个方向。 求多少个点出发可以走到棋盘外。 思路: 经典题了吧,直接从外边界bfs进来看能遍历到多少个点。当然遍历的时候我们要记得把每个点的方向值反一下。 #include <cstdio>#include <cstring>#include <algorithm>#include <vector>#include <queue>usi

uva 10913 Walking on a Grid
原题: You will be given a square grid of size N × N. The top-left square has a coordinate of (1, 1) and that of bottom-right is (N,N). Your job is to walk from (1, 1) to (N,N). Very easy, right? Thats
Educational Codeforces Round 50 (Rated for Div. 2) B. Diagonal Walking v.2(思维)
题目链接:http://codeforces.com/contest/1036/problem/B 题意:给你一个q代表q次询问,然后给出三个数n,m, k。(n,m)代表终点,k代表最多移动的步数。让你求出到达终点的过程中,走对角线的最大步数。 思路:当m > k时输出-1(设m是较大的数),当m-n是奇数时有一步不能走对角线所以k--,当走对角线可以直接到达终点,如果剩余的步数是奇数则有两
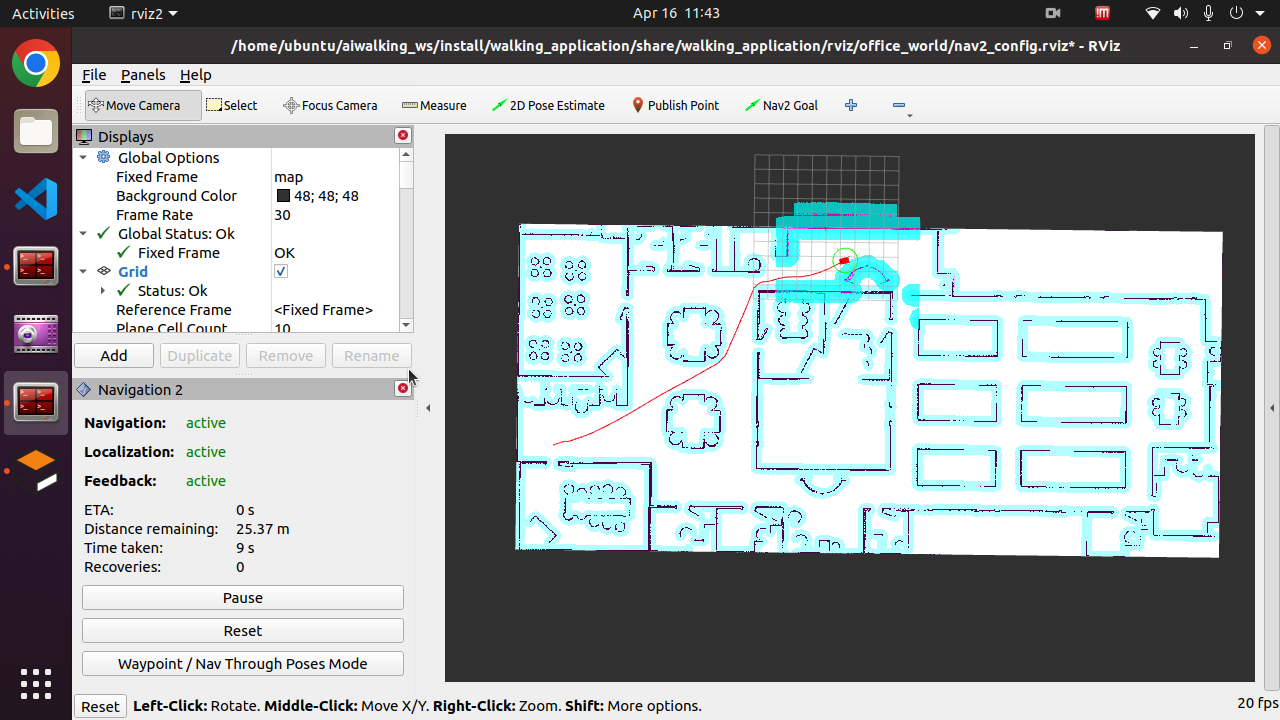
walking机器人仿真教程-应用-多点导航实现办公室内取件和配送
系列文章目录 walking机器人仿真教程-启动仿真环境walking机器人仿真教程-查看仿真环境相关话题walking机器人仿真教程-仿真控制walking机器人仿真教程-激光建图-仿真slam_toolbox算法建图walking机器人仿真教程-激光建图-仿真gmapping算法建图walking机器人仿真教程-激光建图-仿真cartographer算法建图walking机器人仿真教程
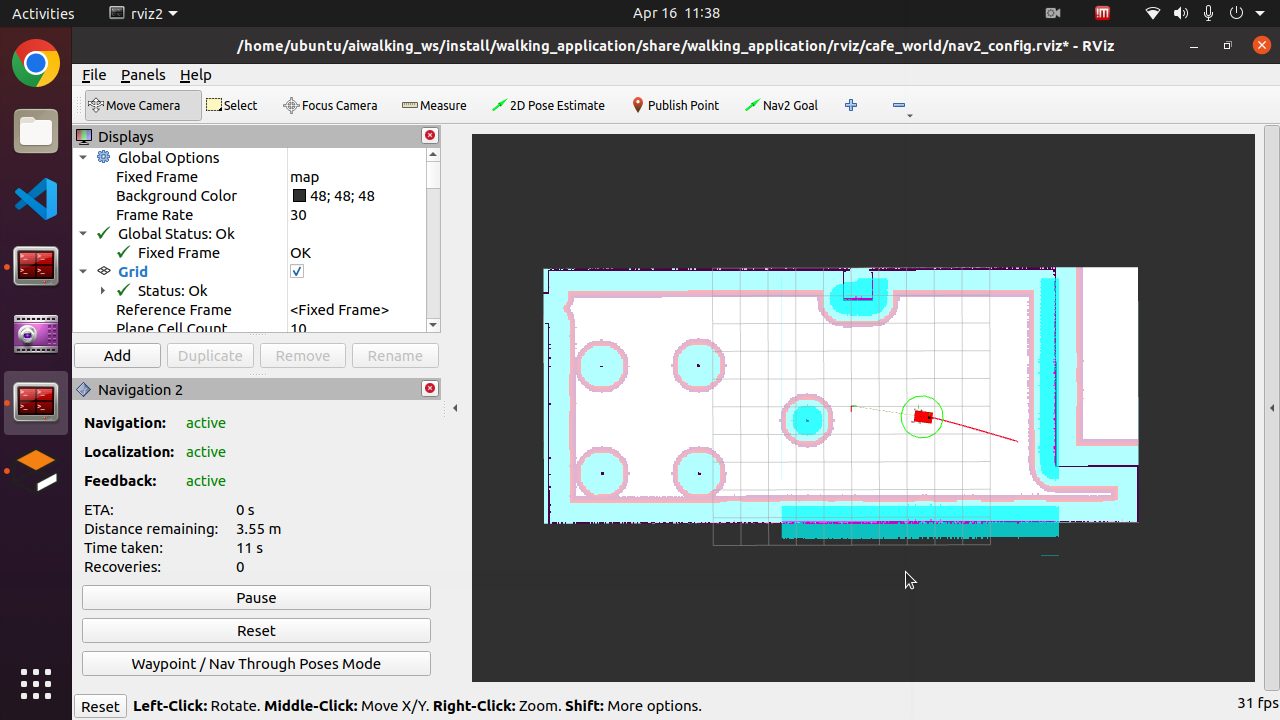
walking机器人仿真教程-应用-多点导航实现咖啡店内配送
系列文章目录 walking机器人仿真教程-启动仿真环境walking机器人仿真教程-查看仿真环境相关话题walking机器人仿真教程-仿真控制walking机器人仿真教程-激光建图-仿真slam_toolbox算法建图walking机器人仿真教程-激光建图-仿真gmapping算法建图walking机器人仿真教程-激光建图-仿真cartographer算法建图walking机器人仿真教程
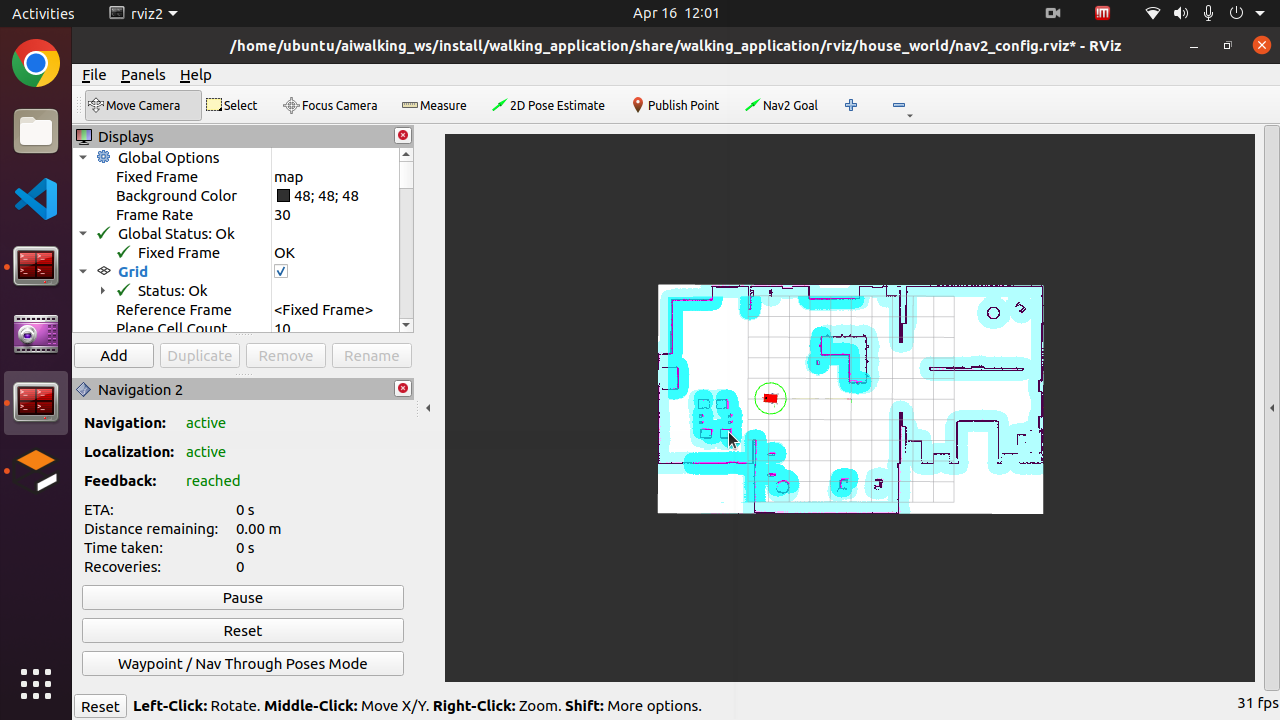
walking机器人仿真教程-应用-多点导航实现房间内巡逻检查
系列文章目录 walking机器人仿真教程-启动仿真环境walking机器人仿真教程-查看仿真环境相关话题walking机器人仿真教程-仿真控制walking机器人仿真教程-激光建图-仿真slam_toolbox算法建图walking机器人仿真教程-激光建图-仿真gmapping算法建图walking机器人仿真教程-激光建图-仿真cartographer算法建图walking机器人仿真教程
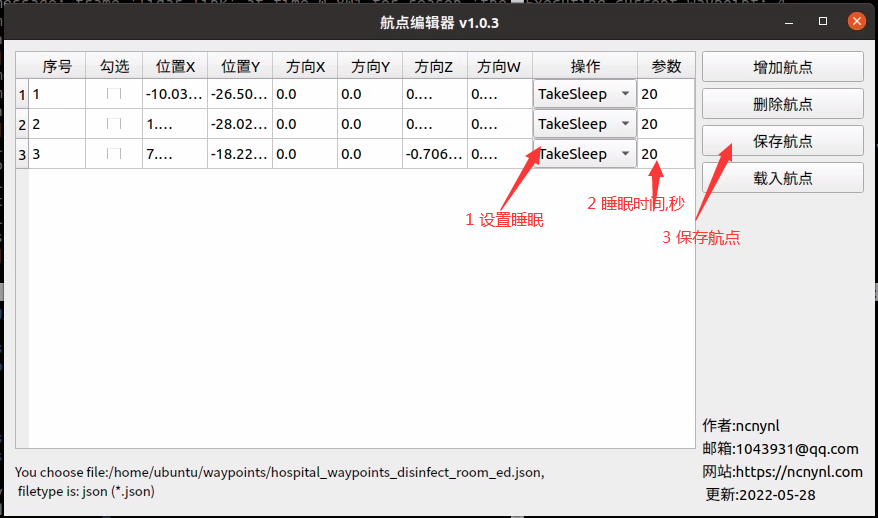
walking机器人仿真教程-应用-多点导航结合睡眠功能实现移动消毒
系列文章目录 walking机器人仿真教程-启动仿真环境walking机器人仿真教程-查看仿真环境相关话题walking机器人仿真教程-仿真控制walking机器人仿真教程-激光建图-仿真slam_toolbox算法建图walking机器人仿真教程-激光建图-仿真gmapping算法建图walking机器人仿真教程-激光建图-仿真cartographer算法建图walking机器人仿真教程

walking机器人仿真教程-应用--多点导航结合拍照功能实现移动摄影
系列文章目录 walking机器人仿真教程-启动仿真环境walking机器人仿真教程-查看仿真环境相关话题walking机器人仿真教程-仿真控制walking机器人仿真教程-激光建图-仿真slam_toolbox算法建图walking机器人仿真教程-激光建图-仿真gmapping算法建图walking机器人仿真教程-激光建图-仿真cartographer算法建图walking机器人仿真教程
POJ3162-Walking Race
题目: flymouse’s sister wc is very capable at sports and her favorite event is walking race. Chasing after the championship in an important competition, she comes to a training center to attend a train
备忘:python和 java graphql client连Sky walking Server查询数据的联通性
本文仅做备忘 Skywalking OAP 关于graphql的url http://localhost:8090/graphql python3.10 需要安装 GraphQLClient库 testGraphQL.py程序 from graphqlclient import GraphQLClientimport jsonif __name__ == '__main__':clien
uva 10913 Walking on a Grid
题意:有一个大小有N(最多75)的方格,要你从(1,1)走到(n,n)。 有如下规则:你只有三个方向,左、右、下。不能走出方格。一个方格只能走一次。你要保证你的路径上的格子的和最大。你最多只能走k(最多为5)个负权值的格子,从起点到终点。 要注意,因为可以向右走,所以定义三维状态可能有问题,所以定义了四维,表示从当前点向左右下走能得到的最大的值。 #include <iostream
Walking the callstack
Walking the callstack 作者:Jochen Kalmbach 翻译:Hefe 原文出处:www.codeproject.com 关键字:callstack, StackWalker 简介 有些情况下,我们需要显示当前线程的callstack,或是显示其他我们感兴趣的进程或线程的callstack,为此,我专门写了这篇文章阐述如何获得callstack。 我