ur专题

UR机械臂的ROS驱动安装官方教程详解——机器人抓取系统基础系列(一)
UR机械臂的ROS驱动安装配置官方教程详解——机器人抓取系统基础系列(一) 前言1 准备工作2 电脑安装驱动3 机器人端设置4 电脑和机器人的通讯IP设置5 启动机械臂的ROS驱动6 MoveIt控制机械臂总结 前言 本文在官方Github教程的基础上,详细阐述了UR机械臂的ROS驱动安装的步骤,为广大从事机器人相关工作的人员作参考。 官方安装教程地址为:https:/

UR rtde参考文档
UR rtde参考文档 传送门: Universal Robots RTDE C++ InterfaceAPI ReferenceRTDE Control Interface API

UR机械臂位置数据旋转矢量与欧拉角变换
UR机械臂位置数据旋转矢量与欧拉角变换 本文介绍在UR机械臂控制过程在,使用函数返回的数据为旋转矢量,但是该数据对于控制非常不友好,我们需要将旋转转化为欧拉角的数据,才可以直观观察到工具端相对于不同轴旋转的角度。本文针对这一问题,描述旋转矢量与欧拉角转换的概念,以及如何通过Python代码进行两者之间相互转换的函数。 参考链接:https://forum.universal-robo

使用HttpClient获得Ur最终跳转页面信息
可以获取重定向或者通过 <meta refresh来跳转的最终地址,解决获取https型的url最终地址的问题 代码如下: using System;using System.Collections.Generic;using System.Linq;using System.Net;using System.Net.Http;using System.Net.Security


UR机器人旋转矢量和俯仰角的转换
我们在使用机器人的时候,总是习惯使用俯仰角来描述机器人末端姿态的变换。这样更直观,但是机器人为了插值方便计算,总是采用旋转矢量来来描述机器人的姿态。该旋转矢量及不直观,单一轴角度旋转时还可以理解,当两个轴或三个轴一起旋转,值的偏离很大。 1.找到机器人中如何描述旋转矢量和俯仰角 在此页面中,TCP中的RX,RY,RZ就是旋转矢量,而非俯仰角,点击此处任何输入框,可以跳转到点编
UR 官方 Robotiq Gripper ROS 配置
最近实验室买了二指夹抓 Robotiq-140, 网上搜不到中文的相关资料,想着国内也没啥这些资料,就填个空白吧。 环境:Ubuntu16.04 ROS Kinetic 假设你已经有了一个新的Robotiq 系列的夹抓 想要配置到ROS下,我们来看看要做些什么。 1)物理安装夹抓并且安装URCap 步骤都在这里 把下载的URCap解压出来放到U盘里插到UR控制箱的USB口中,在示教板上进
在ROS仿真中使用Python程序控制UR机械臂运动
本文参考:手写ROS程序控制ur5机械臂运动(Python)_python控制ur5_孟德尔的猫的博客-CSDN博客 本文使用的环境: Linux版本:Ubantu20.04 ros版本:ros-noetic-desktop-full,安装此版本ros无需再安装moveit运动规划库 编译软件:vscode 1 创建工作空间并安装ros包 mkdir -p ~/ur_ws/s
Ur Home 月刊 第2期
此系列不断搜集开源、有趣的应用;如有侵权,联系删除 人物知识图谱分析 来源:Github仓库PersonRelationGraph 网址:https://dicegraph.github.io/PersonRelationGraph/ 专题:知识图谱可视化 人物知识图谱分析是一个基于 PersonGraphDataSet 数据集的简单知识图谱可视化分析项目。 Perso

ur机器人编程-设置工具
设置工具 3.1工具中心点配置: 找到工具中心点,重量,工具方向,输入错误将可能导致保护性停止 在示教器tcp上输入 工具中心点相对于法兰的位置,输入x,y,z 1.为机器人编程 2.安装设置选项卡 3.Tcp配置 4.将输入工具中心点到法兰的位置(z) 3.2有效载荷配置: 1.测量工具的重量 2.输入到有效负载,单击保存图标,之后保存按钮 3.3设置重心: 1.测量距

【UR #7】水题走四方 题解
链接:http://uoj.ac/problem/84 20分算法:萌萌的小爆搜,别搜进环里就行。 50分:我们考虑一下最优决策是什么样的。看似很显然的一点就是我们先让本体在原地不动,让分身去遍历子树,然后在只剩一个儿子和一个不属于这个儿子的子树的叶子的时候一个去儿子一个去叶子。显然这个叶子应该是最深的那个叶子看起来好像并没有什么毛病,然而我们会发现他会被样例3hack,因为我们可以
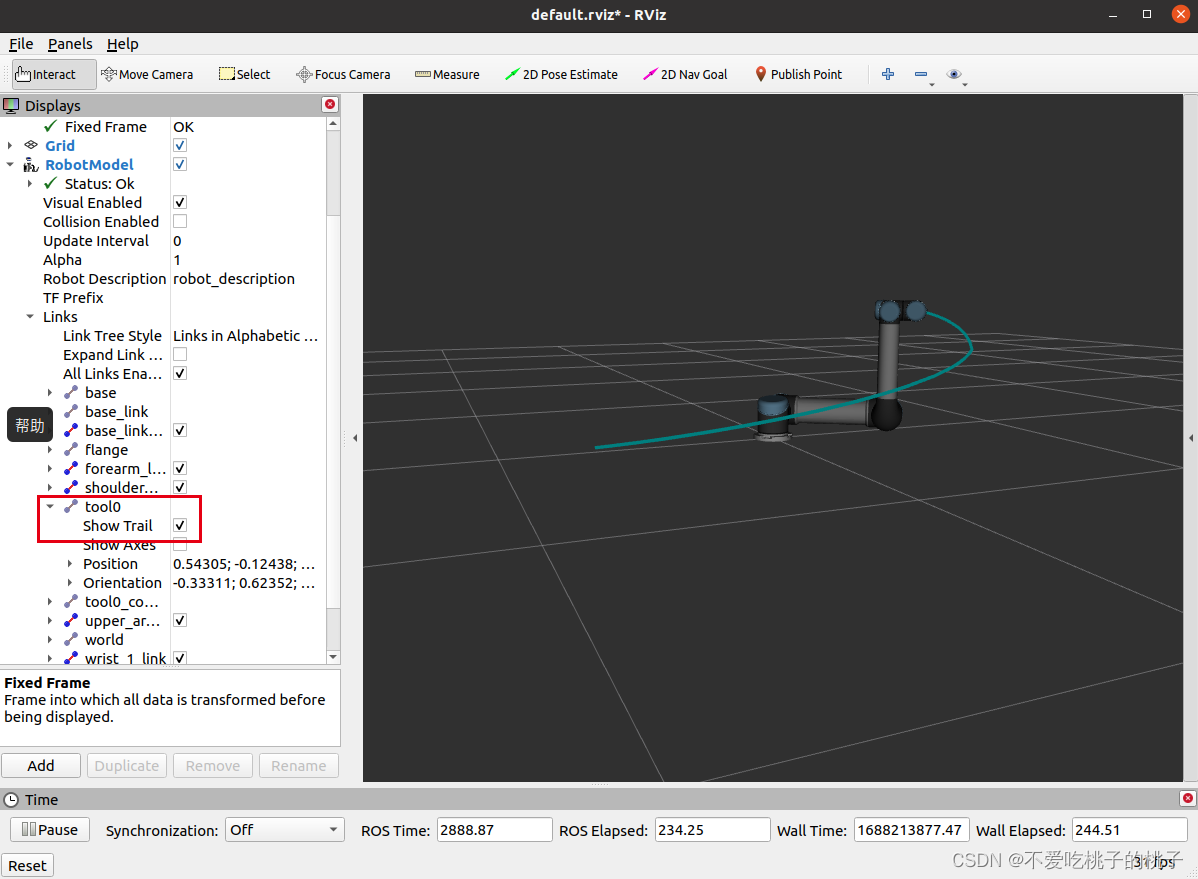
UR中ROS仿真使用脚本命令控制
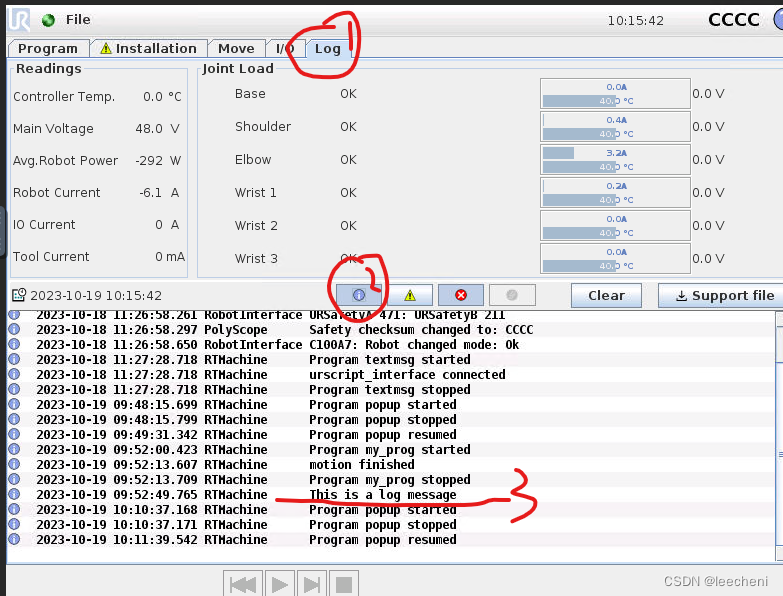
1.下载最新的脚本命令文件 在浏览器搜索“UR官网”,打开协作机器人的那个连接。 按照图示进行点击下载官方的脚本文件 2.按ros2 ur部分的说明进行测试 网站如下: Usage — ur_robot_driver documentation 查看现在的topic,找到最后那个/urscript_interface/script_command cheni

html ur是什么意思_html是什么意思?
HTML是超文本标记语言(Hyper Text Markup Language),标准通用标记语言下的一个应用。HTML 不是一种编程语言,而是一种标记语言 (markup language),是网页制作所必备的。 web前端学习:打造全网web前端全栈资料库(总目录)看完学的更快,掌握的更加牢固,你值得拥有(持续更新)zhuanlan.zhihu.com “超文本”就是指页面内
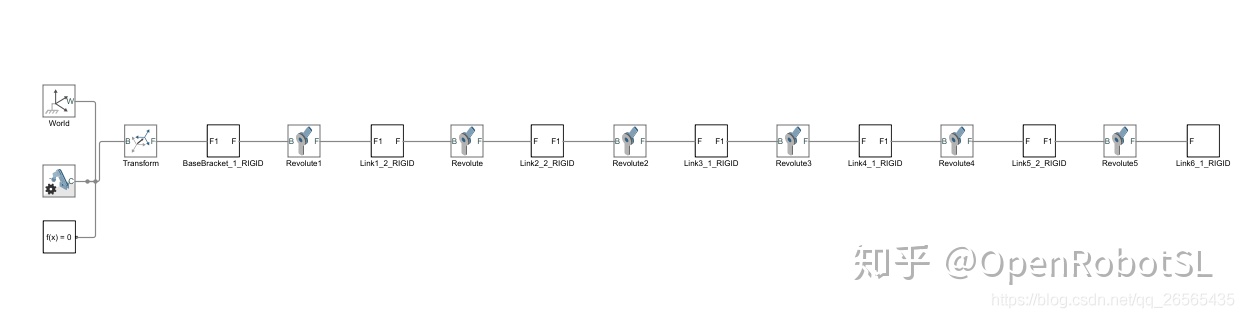
html ur是什么意思_UR机械臂simscape正逆解仿真
最近在看相关的课程,把作业做一下,还是蛮有意思的。(课程代码所以涉及版权问题,经过同意后我上传代码) UR机械臂的物理模型文件是根据SolidWorks插件simscape导出的xml文件,课程直接提供的,博客不便给出,清楚整个建模原理就行。但个人还是觉得urdf文件好理解一些,可以人为控制各个坐标系的方向、位置还有质心的位置,不同机械臂的urdf文件可以自己在SolidWorks中建模

html ur是什么意思_《HTML入门笔记1》
HTML 是谁发明的:蒂姆·伯纳斯-李(李爵士) HTML 起手应该写什么: HTML 起手式格式 <!DOCTYPE html> # 告诉浏览器文档类型是 html HTML 标签:常用的表章节的标签有哪些,分别是什么意思(h1~h6、section、article、main、aside 等等) © —— 版权标志© Ctrl+Shift+L —— 美化格

html ur是什么意思_html如何嵌套页面?lt;iframegt;标签告诉你答案
本篇文章主要为大家介绍了html iframe标签的介绍,让大家知道怎么通过iframe标签来为网页嵌套页面,内容很简单,大家照着这上面的来,多实践几次就懂了。希望大家都能好好学习,现在让我们来看这篇文章吧。 程序猿的生活:打造全网web前端全栈资料库(总目录)看完学的更快,掌握的更加牢固,你值得拥有(持续更新)zhuanlan.zhihu.com 在这里小编首先介绍的是HTML中ifr
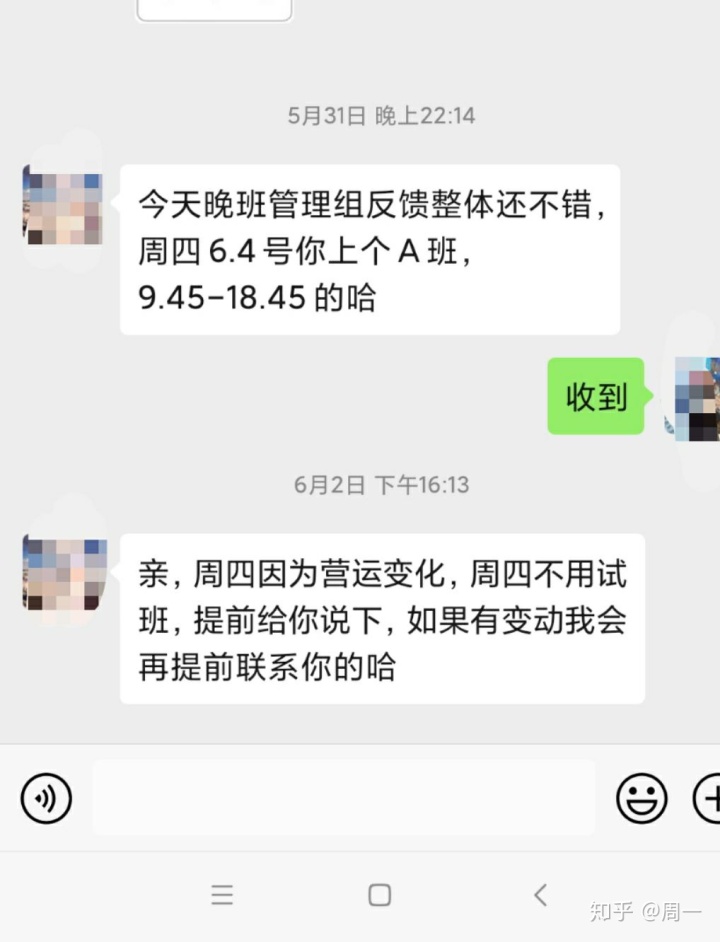
html ur是什么意思_ur兼职,无语
对比所有快销品牌我觉得ur是最难接受的!事情是这样的我于2020.5.29号,投了长沙泊富ur的简历并进行了面试,晚上接到电话让我5.31号去试班,13:00-22:00,要试一整个班啊,我有点难受,不过我还挺高兴的,找到工作了。 ur工作要穿黑短袖,黑裤子,黑鞋子,我还特意去买了(气死)。5.31号去到店里试班,店内工作挺简单,就出出衣服,整理整理细节,服务一下顾客,到下午四点 ,他就要我