本文主要是介绍在ROS仿真中使用Python程序控制UR机械臂运动,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
本文参考:手写ROS程序控制ur5机械臂运动(Python)_python控制ur5_孟德尔的猫的博客-CSDN博客
本文使用的环境:
Linux版本:Ubantu20.04
ros版本:ros-noetic-desktop-full,安装此版本ros无需再安装moveit运动规划库
编译软件:vscode
1 创建工作空间并安装ros包
mkdir -p ~/ur_ws/src
cd ~/ur_ws/src
git clone https://github.com/ros-industrial/universal_robot
cd ..
catkin_make2 运行相关launch文件
在下载的包中,在universal_robot/ur_gazebo/launch路径下有一个ur5_bringup.launch文件
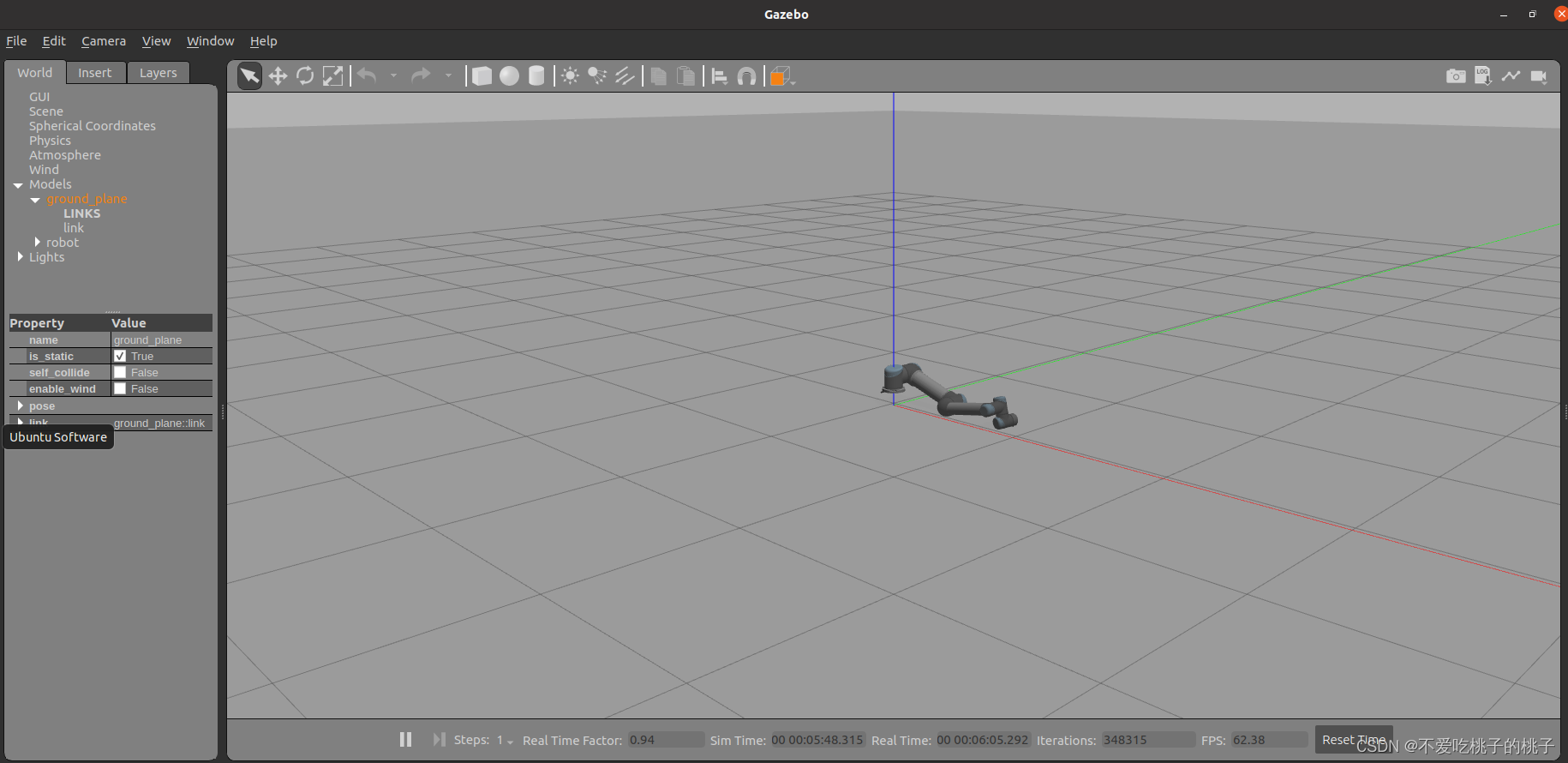
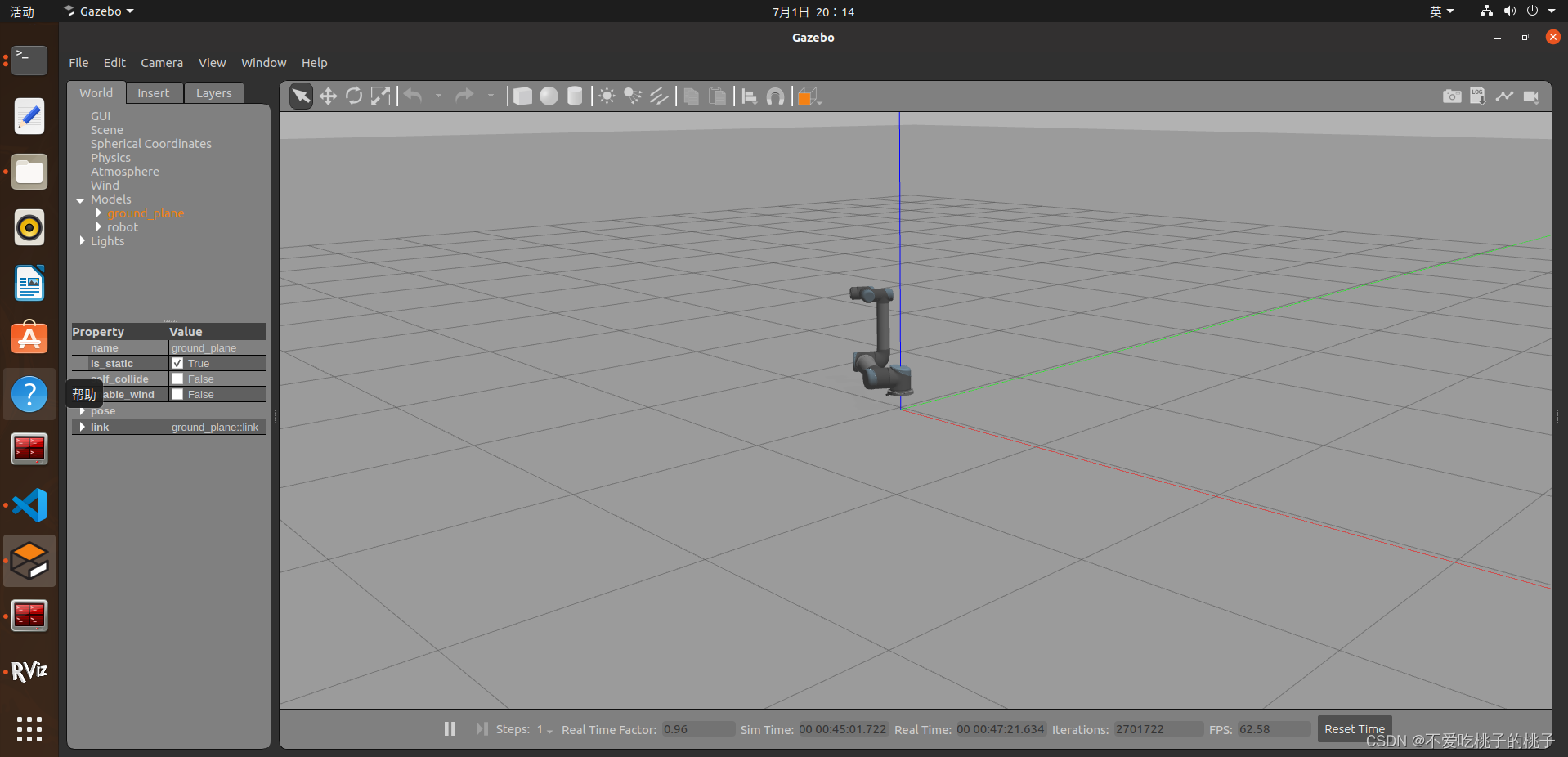
roslaunch ur_gazebo ur5_bringup.launch
可以在Gazebo中看到有一个ur机械臂
新打开一个终端输入rostopic list查看话题
rostopic list
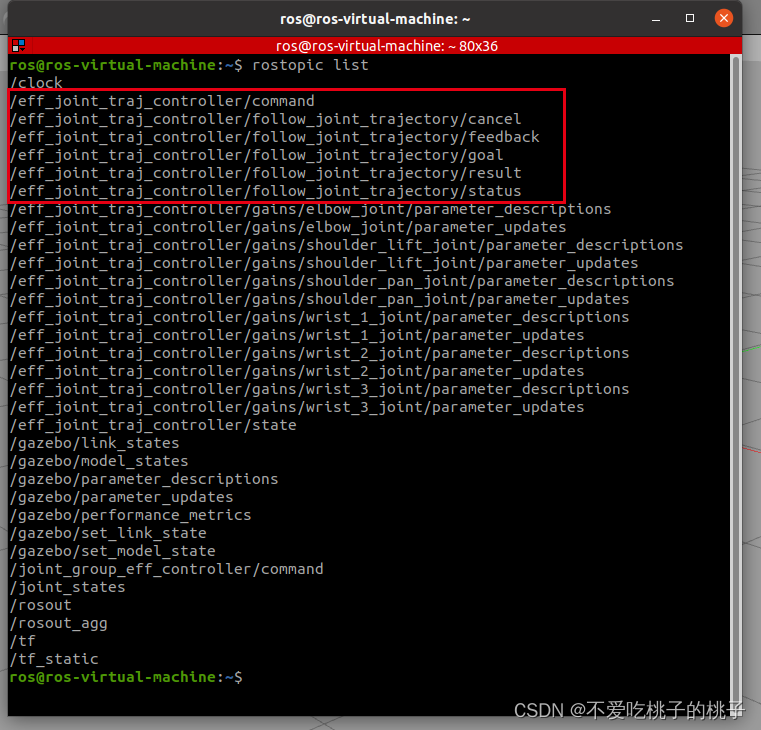
其中 /eff_joint_traj_controller/follow_joint_trajectory 是控制 ur 运动的话题,很明显,该话题使用的是action通信,有关 action 通信的知识可以看一下赵虚左老师讲的 ros 教程【Autolabor初级教程】ROS机器人入门_哔哩哔哩_bilibili
终端输入命令
rostopic type /eff_joint_traj_controller/follow_joint_trajectory/goal 可以看到该话题的类型是 control_msgs/FollowJointTrajectoryActionGoal
再使用命令
rosmsg show control_msgs/FollowJointTrajectoryActionGoal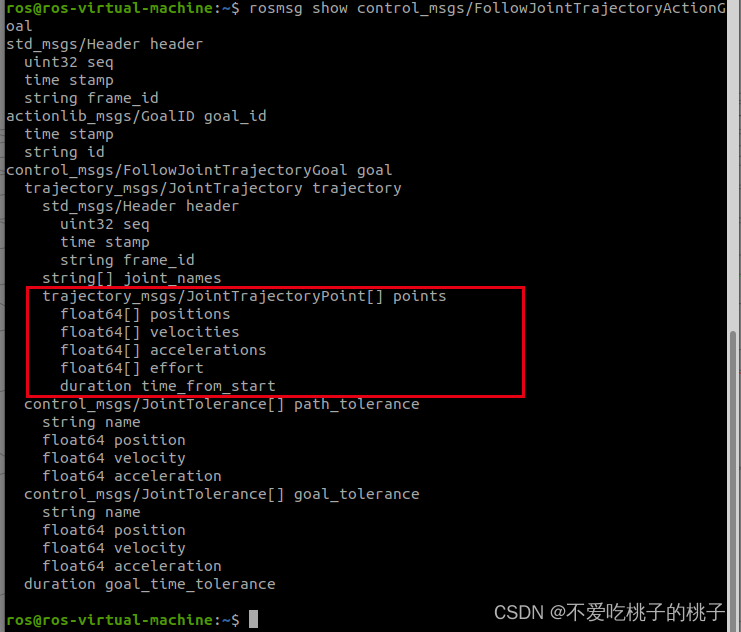
可以看到红框中的就是我们需要关心的
3 编写Python文件
进入工作空间打开vscode
cd ur_ws/
code .
新建功能包,并添加依赖项:rospy std_msgs actionlib
在新建功能包下添加问价夹 scripts,并在该文件夹添加demo01.py文件,可以参考赵虚左老师的ros教程,Python代码如下
#! /usr/bin/env python
from trajectory_msgs.msg import *
from control_msgs.msg import *
import rospy
import actionlib
from sensor_msgs.msg import JointStateJOINT_NAMES = ['shoulder_pan_joint', 'shoulder_lift_joint', 'elbow_joint','wrist_1_joint', 'wrist_2_joint', 'wrist_3_joint']def move():#goal就是我们向发送的关节运动数据,实例化为FollowJointTrajectoryGoal()类goal = FollowJointTrajectoryGoal()#goal当中的trajectory就是我们要操作的,其余的Header之类的不用管goal.trajectory = JointTrajectory()#goal.trajectory底下一共还有两个成员,分别是joint_names和points,先给joint_names赋值goal.trajectory.joint_names = JOINT_NAMES#从joint_state话题上获取当前的关节角度值,因为后续要移动关节时第一个值要为当前的角度值joint_states = rospy.wait_for_message("joint_states",JointState)joints_pos = joint_states.position#给trajectory中的第二个成员points赋值#points中有四个变量,positions,velocities,accelerations,effort,我们给前三个中的全部或者其中一两个赋值就行了goal.trajectory.points=[0]*4goal.trajectory.points[0]=JointTrajectoryPoint(positions=joints_pos, velocities=[0]*6,time_from_start=rospy.Duration(0.0))goal.trajectory.points[1]=JointTrajectoryPoint(positions=[0.1,0,-0.2,0,0,0], velocities=[0]*6,time_from_start=rospy.Duration(1.0))goal.trajectory.points[2]=JointTrajectoryPoint(positions=[2,0,-1,0,0,0], velocities=[0]*6,time_from_start=rospy.Duration(2.0))goal.trajectory.points[3]=JointTrajectoryPoint(positions=[2.57,0,-1.57,0,0,0], velocities=[0]*6,time_from_start=rospy.Duration(3.0))#发布goal,注意这里的client还没有实例化,ros节点也没有初始化,我们在后面的程序中进行如上操作client.send_goal(goal)client.wait_for_result()def pub_test():global client#初始化ros节点rospy.init_node("pub_action_test")#实例化一个action的类,命名为client,与上述client对应,话题为/eff_joint_traj_controller/follow_joint_trajectory,消息类型为FollowJointTrajectoryActionclient = actionlib.SimpleActionClient('/eff_joint_traj_controller/follow_joint_trajectory', FollowJointTrajectoryAction)print("Waiting for server...")#等待serverclient.wait_for_server()print("Connect to server......")#执行move函数,发布actionmove()if __name__ == "__main__":count = 0while not rospy.is_shutdown():count += 1pub_test()rospy.loginfo("发布次数:%d",count)给demo01.py 文件添加可执行权限
在新建功能包下的 CMakeList.txt 中配置 demo01.py文件
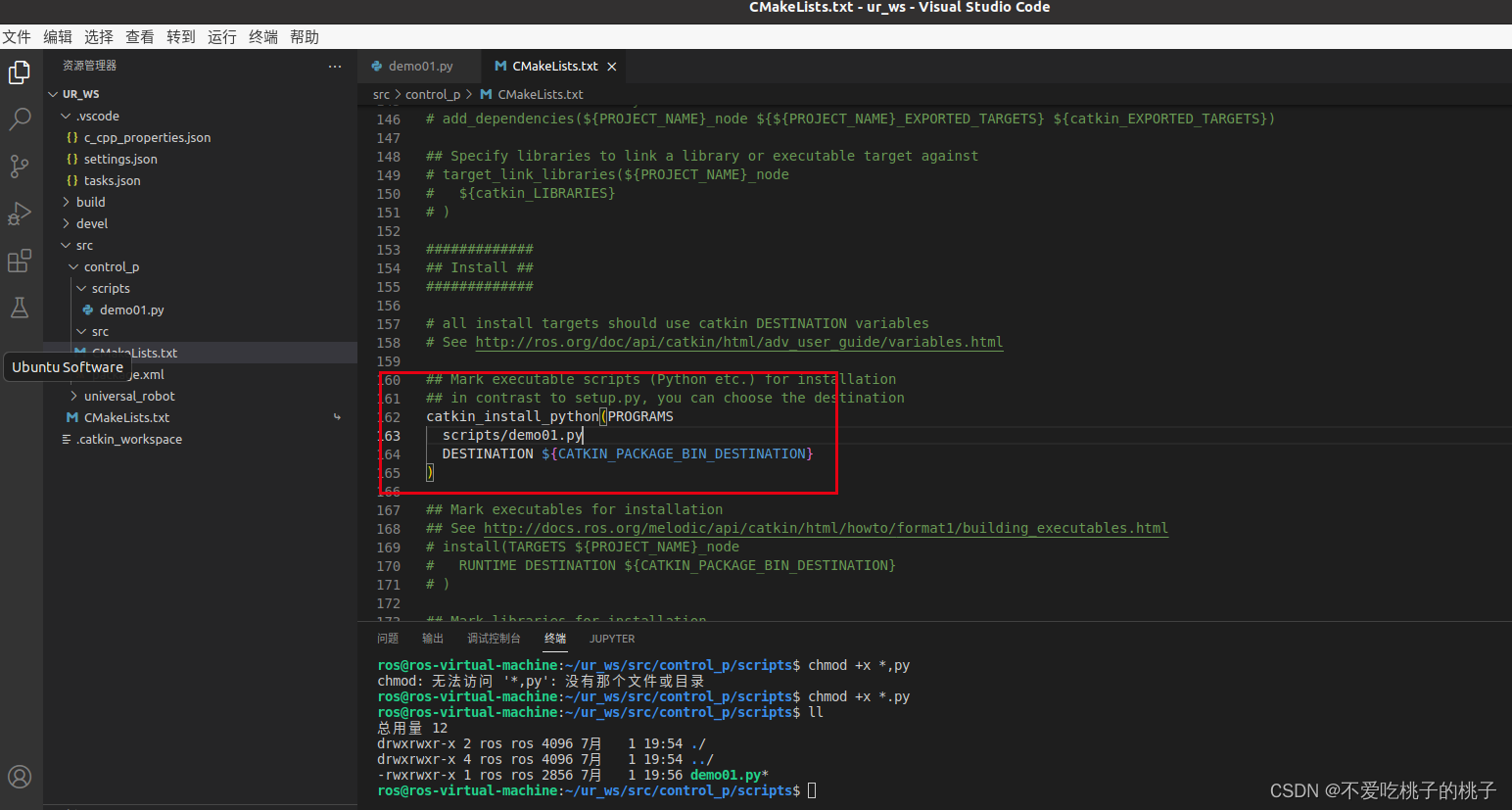
配置完后编译文件
4 终端测试
编译成功后运行demo01.py文件
source ./devel/setup.bash
rosrun control_p demo01.py这时候就可以看到Gazebo中的ur机械臂动起来了
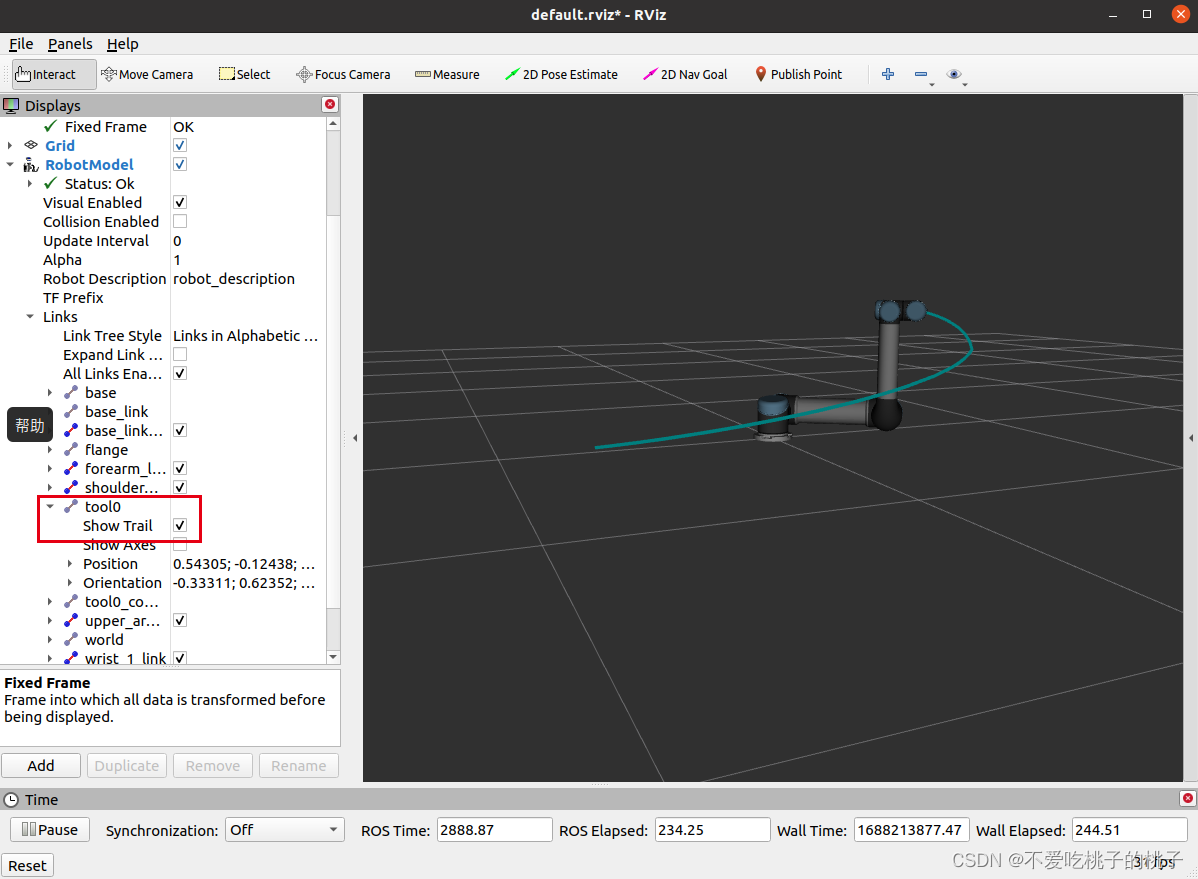
运行rviz
roslaunch ur5_moveit_config moveit_rviz.launch config:=true勾选末端轨迹 Show Trail ,就可以看到rviz中的ur机械臂运动轨迹了
这篇关于在ROS仿真中使用Python程序控制UR机械臂运动的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!



