turtlebot3专题

【ROS2大白话】三、给turtlebot3安装realsense深度相机
系列文章目录 【ROS2大白话】一、ROS2 humble及cartorgrapher安装 【ROS2大白话】二、turtlebot3安装 【ROS2大白话】三、给turtlebot3安装realsense深度相机 【ROS2大白话】四、ROS2非常简单的传参方式 文章目录 系列文章目录效果展示一、修改model.sdf文件1. 路径位置2. 修改代码 二、修改urdf文件1. 路径
ros 学习记录(四)仿真环境中键盘控制turtlebot3运动
仿真环境中键盘控制turtlebot3运动 准备工作1. 监听键盘敲击:key_publisher.py2. 控制turtlebot3运动:keys_to_twist_using_rate.py3. 测试4. 数据监视 准备工作 名称版本ROSNoeticGazebo11.11.0python3.8.10 turtlebot3的安装与仿真环境搭建请看上一篇帖子。 在此基础上
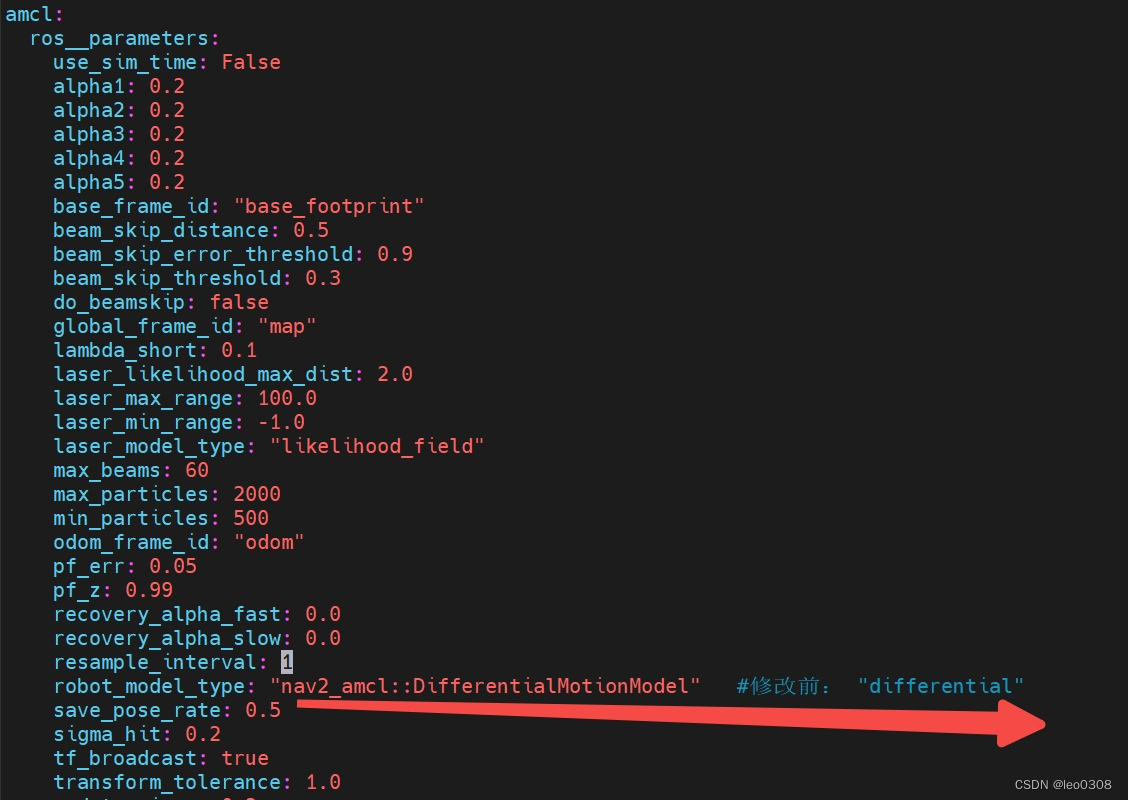
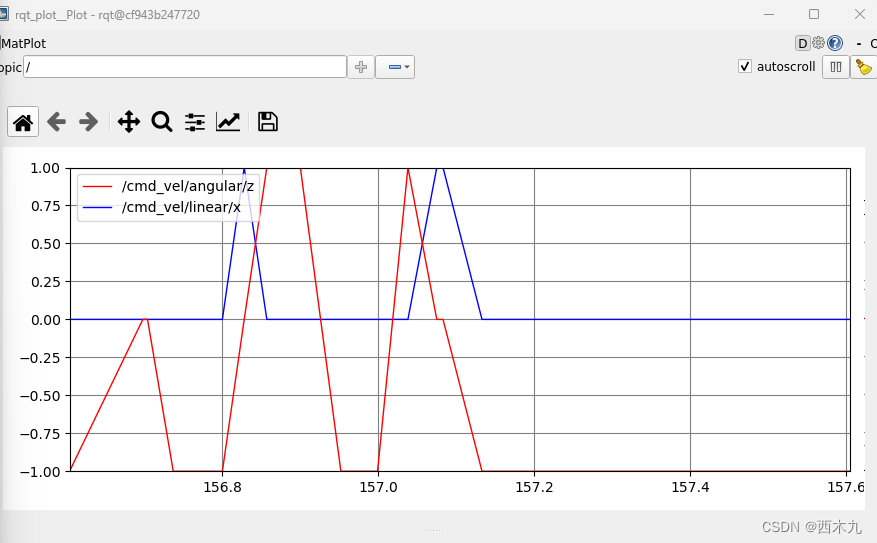
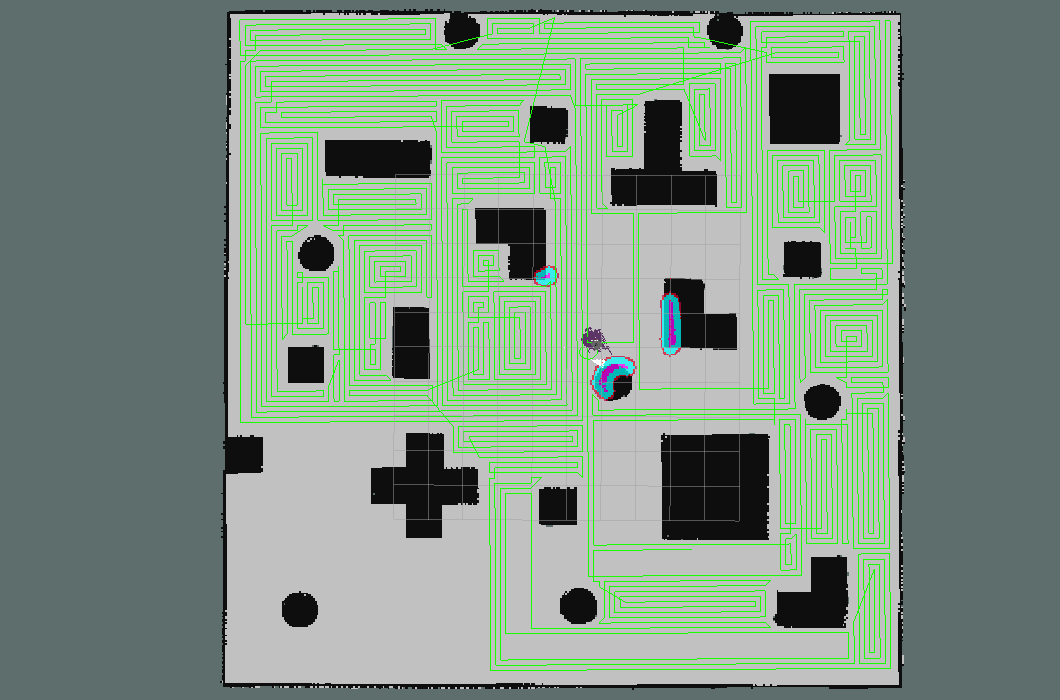
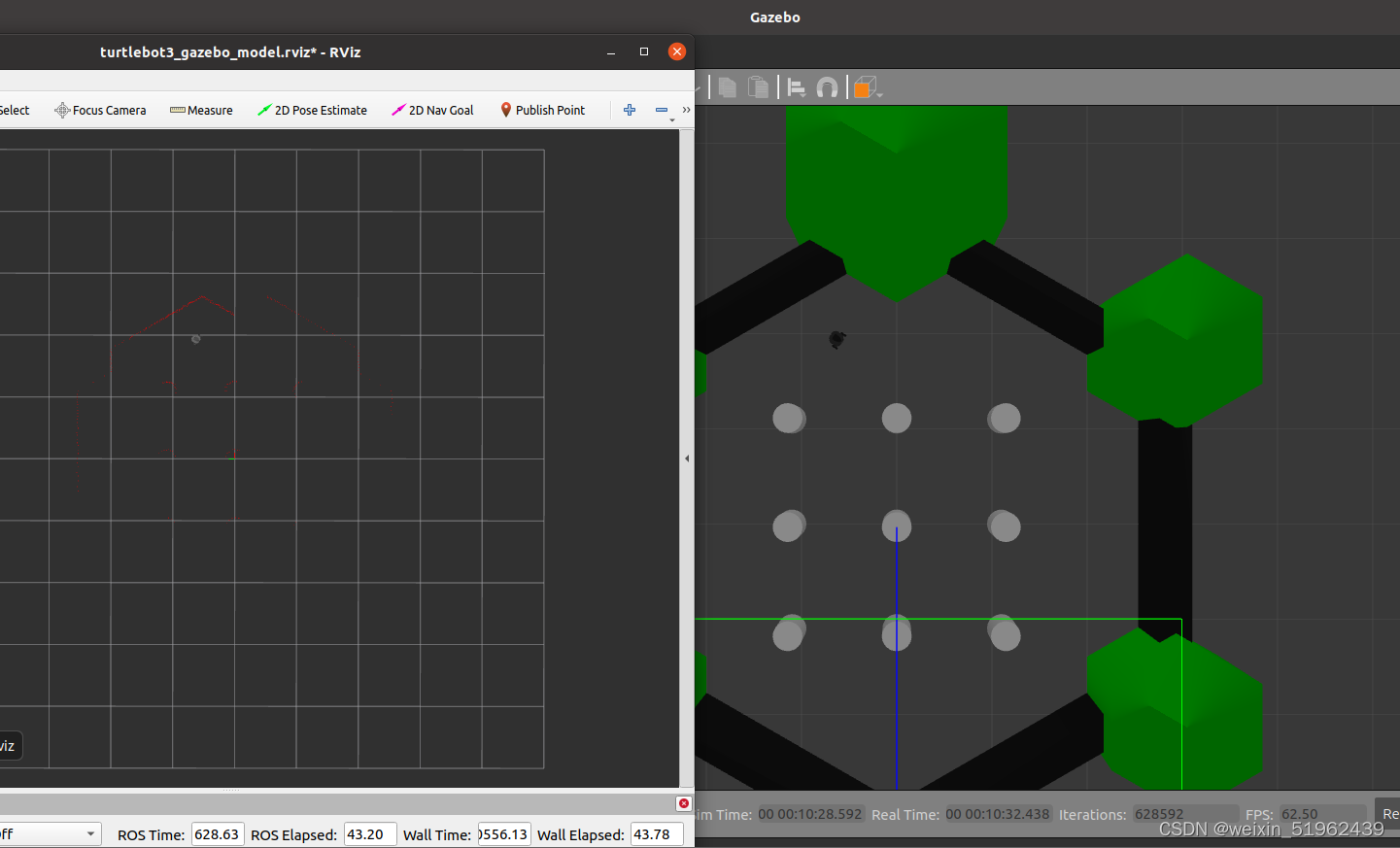
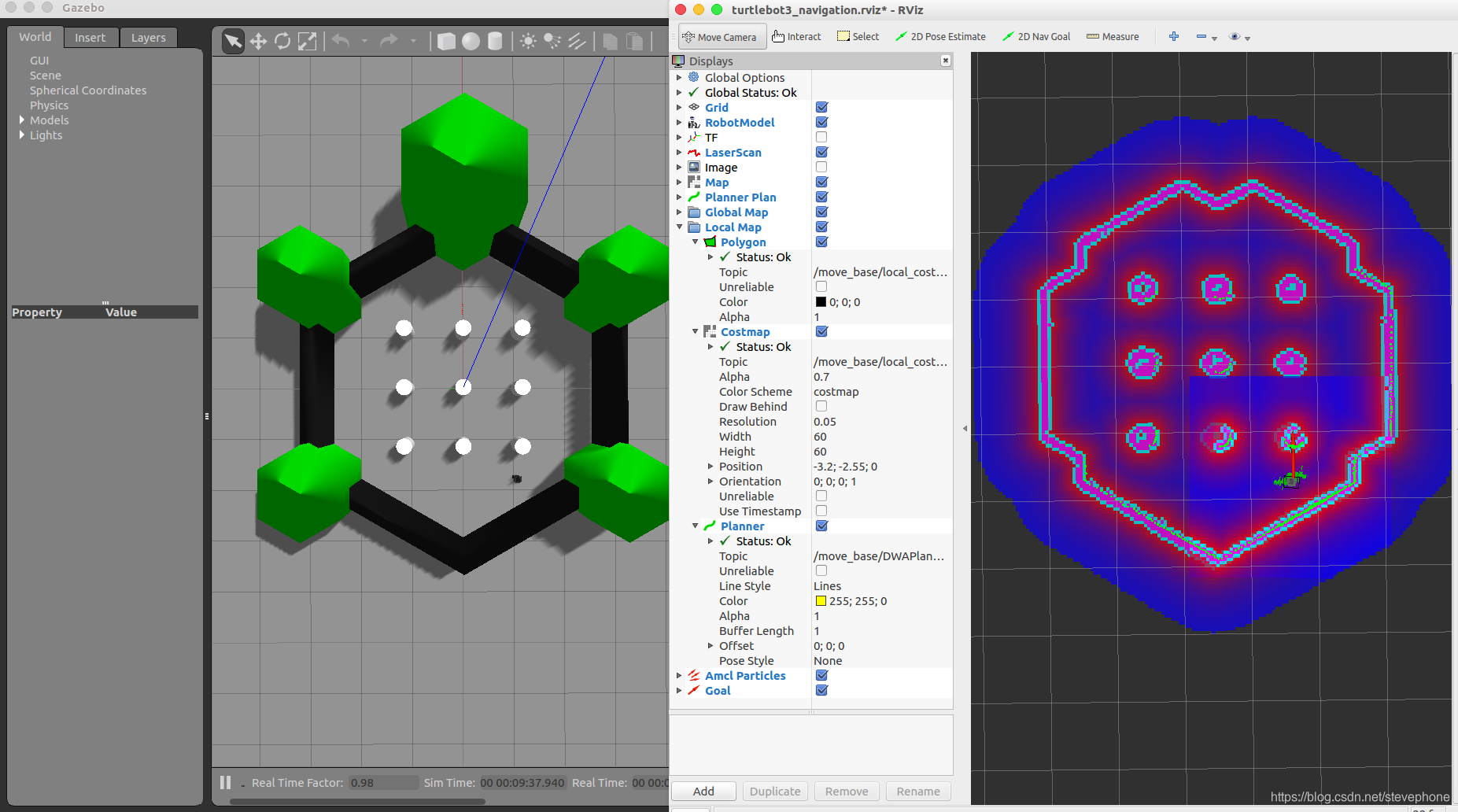
ROS2+TurtleBot3+Cartographer+Nav2实现slam建图和导航
0 引言 入门机器人最常见的应用就是slam建图和导航,本文将详细介绍这一流程, 便于初学这快速上手。 首先对需要用到的软件包就行简单介绍。 turtlebot3: 是一个小型的,基于ros的移动机器人。 学习机器人的很多示例程序都是基于turtlebot3。 Cartographer: 是一个流行的slam建图工具包。 Nav2: 是一个流行的导航工具包。 gazebo: 是一个基于ros的物

Turtlebot3 waffle 实战一
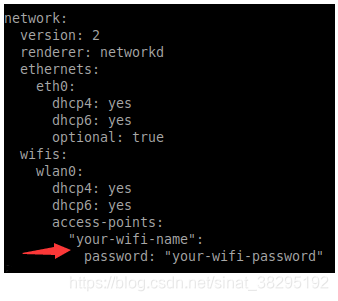
1. Turtlebot3 waffle如下图所示 2. 使用 通过HDMI接口连接一20inch液晶显示器,使用micro-usb通过电脑USB接口供电,通过USB接口连接键盘、鼠标。 连接网线。(以上是我的个人配置) 3. 设置网络 (1)设置IP地址和子网掩码 sudo ifconfig 网卡名 IP地址 netmask 子网掩码 (2)
全覆盖路径规划开源项目Clean-robot-turtlebot3原理及流程概括总结
本系列文章主要介绍全覆盖路径规划开源项目Clean-robot-turtlebot3的相关内容,包含如下四篇文章,分别介绍了开源项目Clean-robot-turtlebot3流程的概括总结、ROS坐标系常用坐标及其变换、Clean-robot-turtlebot3关键函数解析等内容。 1、全覆盖路径规划开源项目Clean-robot-turtlebot3原理及流程概括总结 h
Turtlebot3模拟仿真(参考书《ROS机器人开发实用案例分析》卡罗尔·费尔柴尔德, 托马斯·L.哈曼 机械工业出版社, 2020年4月)
1.下载turtlebot3模拟软件(注意替换为自己的ROS版本) sudo apt-get install ros-noetic-joy ros-noetic-teleop-twist-joy ros-noetic-teleop-twist-keyboard ros-noetic-laser-proc ros-noetic-rgbd-launch ros-noetic-depthimage-t
【ros实践2】turtlebot3建图与导航
turtlebot3建图与导航 建图导航 建图 1.启动tb3模型和仿真环境 export TURTLEBOT3_MODEL=burger ## TURTLEBOT3_MODEL有burger, waffle或waffle_pi三种roslaunch turtlebot3_gazebo turtlebot3_world.launch 2.打开新终端,启动slam

【ros实践1】turtlebot3仿真环境与测试
turtlebot3仿真环境与测试 turtlebot3(tb3)仿真环境搭建turtlebot3简单测试 真的是要好好记录总结了,不然忘的太快了(手动狗头) 环境说明:Ubuntu16.04 + ros-kinetic turtlebot3(tb3)仿真环境搭建 1.创建ros工作空间 mkdir -p robot_ws/srccd robot/srccatkin
Turtlebot3调试必看——爬坑笔记(内含ROS和Turtlebot参考教程)
设备及系统版本: PC端: Lenovo Y7000P + Ubuntu18.04 + ROS Melodic。如果使用电脑也为此型号,系统建议安装Ubuntu18.04,因为安装16.04后会缺少独显、触摸版、无线网卡等驱动,后续安装也很麻烦。其他型号电脑可根据电脑情况自选,只是在按照官方说明书调试时要注意切换ROS版本(Ubuntu18.04对应ROS Melodic;Ubuntu16.0
![[ROS2]源码安装turtlebot3用于调试(简易版)](/front/images/it_default.gif)
[ROS2]源码安装turtlebot3用于调试(简易版)
[ROS2]源码安装turtlebot3用于调试(简易版) 下面的操作是基于galactic turtlebot3的代码下载: 安装git和编译工具 sudo apt-get install git python3-vcstool build-essential python3-colcon-common-extensionsmkdir -p turtlebot3_ws/srccd t
compile turtlebot3_gazebo error
自己无意中重新安装了其他版本的protobuf,出现以下错误: /usr/local/include/google/protobuf/arenastring.h:225:31: note: candidate expects 0 arguments, 1 providedIn file included from /usr/include/gazebo-9/gazebo/msgs/Mess

turtlebot深度相机_ROS机器人开源套件Turtlebot3定制版(Turbot3-DL)新品
双氙商品详情 相关推荐 商品标签云 买过的人评价 ROS机器人开源套件Turtlebot3定制版(Turbot3-DL)注意: 非现货,需要2天完成组装和测试。采购请先与客服沟通。基于Turtlebot3定制版,做如下改进:- 采用Burger的电机,能支持15KG,对于迷你机型负载已经足够- 采用waffle的尺寸,更方便扩展- 采用单个塑胶滚轮,移动更顺畅方便- 采用TX2开发板,性能更

Turtlebot3 仿真
1. 安装仿真相关库 sudo apt install ros-noetic-turtlebot3* 2. 打开仿真环境 export TURTLEBOT3_MODEL=burgerroslaunch turtlebot3_gazebo turtlebot3_house.launch TURTLEBOT3_MODEL可选模型包括burger, waffle 或 waffle_pi 三种