本文主要是介绍【ros实践2】turtlebot3建图与导航,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
turtlebot3建图与导航
- 建图
- 导航
建图
1.启动tb3模型和仿真环境
export TURTLEBOT3_MODEL=burger ## TURTLEBOT3_MODEL有burger, waffle或waffle_pi三种
roslaunch turtlebot3_gazebo turtlebot3_world.launch
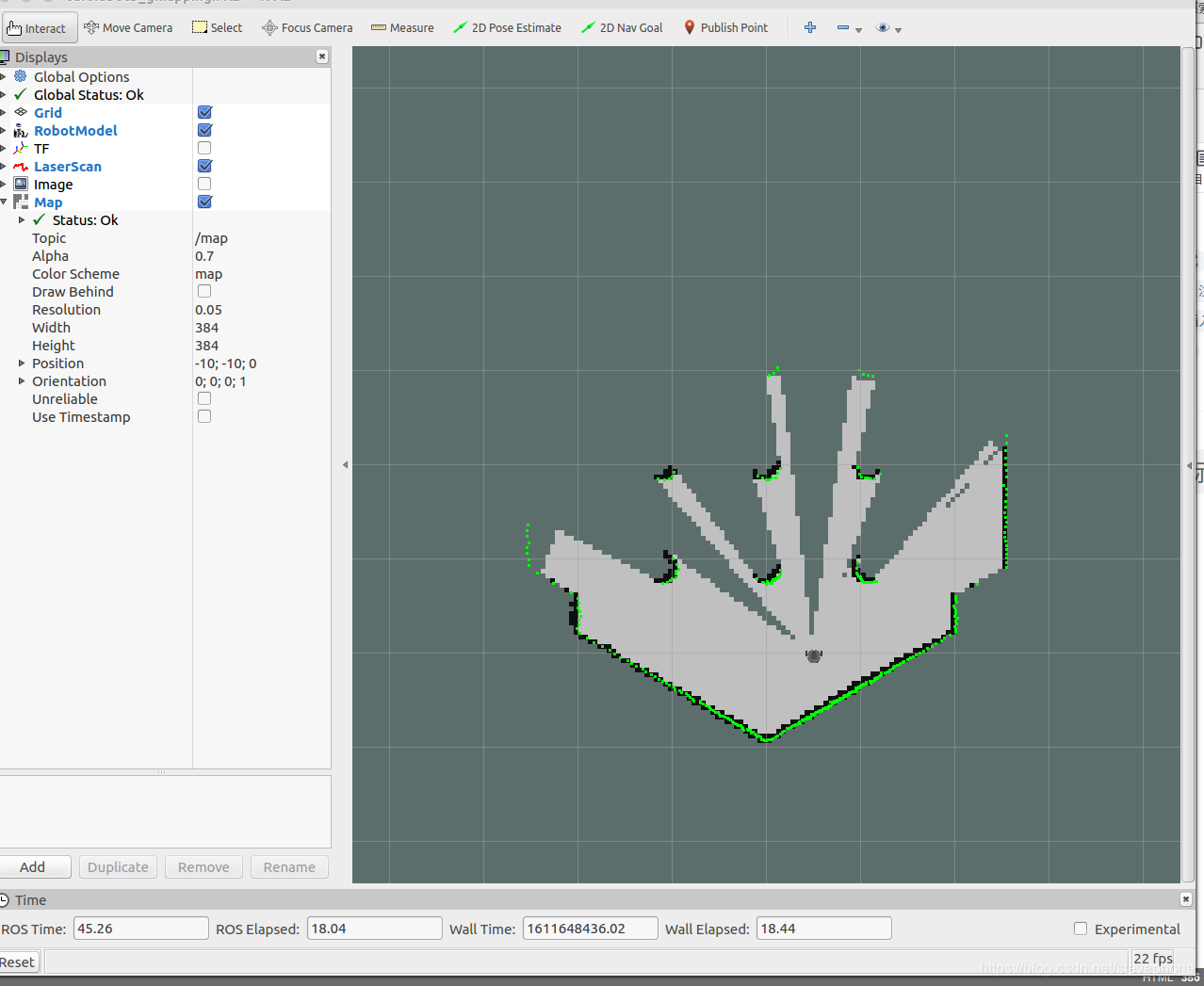
2.打开新终端,启动slam建图
export TURTLEBOT3_MODEL=burger ## TURTLEBOT3_MODEL有burger, waffle或waffle_pi三种
roslaunch turtlebot3_slam turtlebot3_slam.launch slam_methods:=gmapping
3.打开新终端,启动键盘控制
roslaunch turtlebot3_teleop turtlebot3_teleop_key.launch
使用键盘控制tb3在整个环境中运动(尽可能扫到所有区域)
 4.打开新终端,保存地图
4.打开新终端,保存地图
rosrun map_server map_saver -f ~/map
建图完成,地图信息保存为两个文件:mao.pgm和map.yaml
其中map.yaml内容中:
(1)image对应所产生的.pgm文件;
(2)resolution指地图分辨率,单位是meters/pixel,每个像素对应5米。
(3)origin对应地图的原点坐标,分别是x/y/yaw。
(4)negate是反转黑白。
(5)当占用概率超过占用阈值(occupied thresh)时,表示为黑色占用区域,而当占用概率小于自由阈值(free thresh)时,表示为白色占用区域。*
导航
1.打开终端,加载仿真环境
export TURTLEBOT3_MODEL=burger ## TURTLEBOT3_MODEL有burger, waffle或waffle_pi三种
roslaunch turtlebot3_gazebo turtlebot3_world.launch
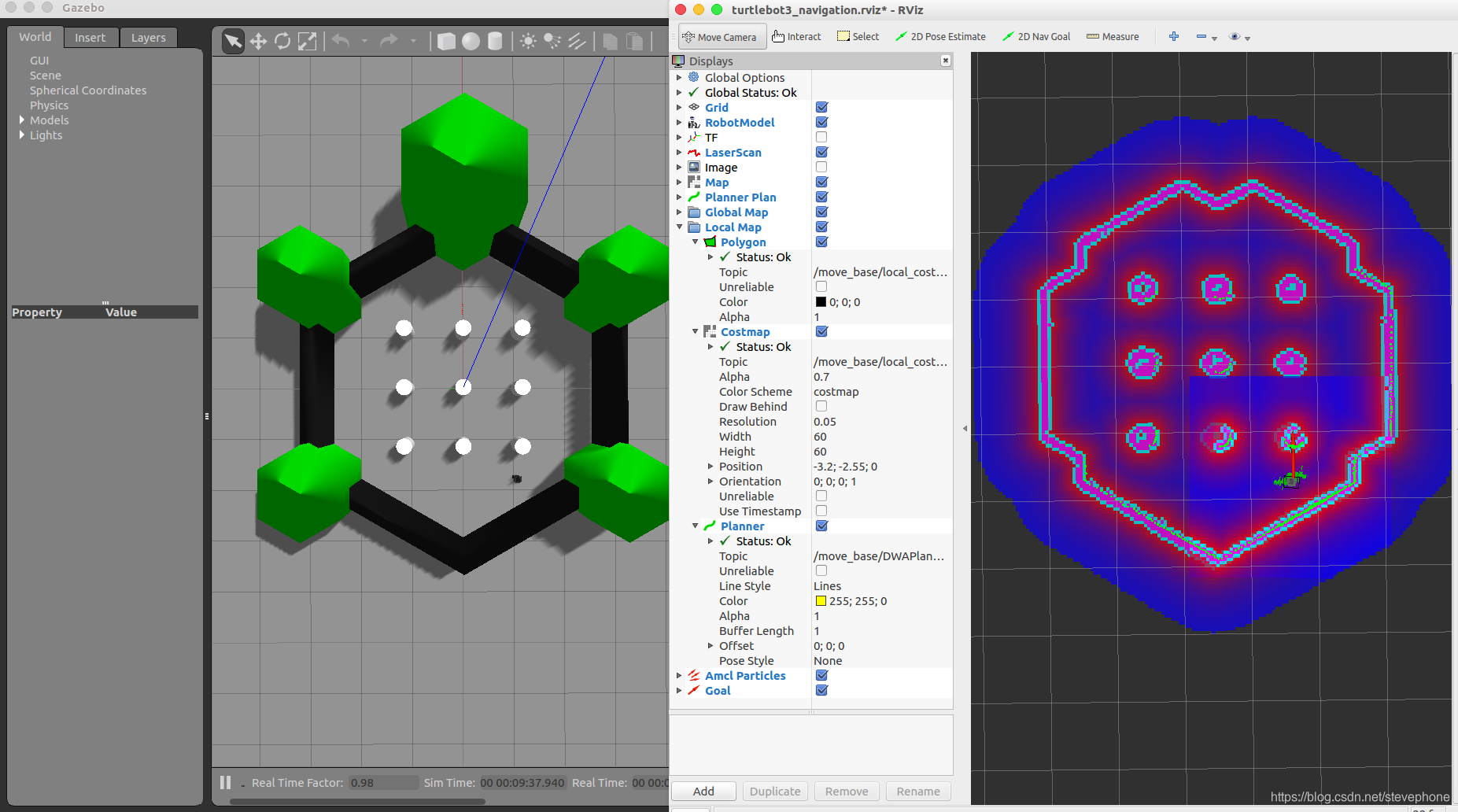
2.启动导航程序
export TURTLEBOT3_MODEL=burger ## TURTLEBOT3_MODEL有burger, waffle或waffle_pi三种
roslaunch turtlebot3_navigation turtlebot3_navigation.launch map_file:=$HOME/map.yaml
3.实测(引用https://blog.csdn.net/weixin_42032160/article/details/105440552)
(1)在rviz菜单中按下[2d pose estimate]时,会出现一个绿色箭头,将其拖拽至tb3机器人在地图中的位置,并按住鼠标左键,转动绿色箭头使其指向机器人的正前方.这是一种在初期为了估计机器人位置的命令。然后用turtlebot3_teleop_keyboard节点等来回移动机器人,搜集周围的环境信息,找出机器人当前位于地图上的位置。经过了这个过程后,机器人将绿色箭头指定的位置和方向作为初始位置,推定自己的位置和方向。
(2)一切准备就绪后,下面下达移动命令。如果在RViz的菜单中按[2D Nav Goal],会出现一个非常大的绿色箭头。该绿色箭头是指定机器人的目的地的标记,箭头的起点是机器人的x、y位置,箭头方向是机器人的i方向。将此箭头移动到机器人的目的地,然后拖动,以设置方向。机器人将根据创建的地图躲避障碍物,移动到目的地.
这篇关于【ros实践2】turtlebot3建图与导航的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!





