本文主要是介绍ros 学习记录(四)仿真环境中键盘控制turtlebot3运动,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
仿真环境中键盘控制turtlebot3运动
- 准备工作
- 1. 监听键盘敲击:key_publisher.py
- 2. 控制turtlebot3运动:keys_to_twist_using_rate.py
- 3. 测试
- 4. 数据监视
准备工作
| 名称 | 版本 |
|---|---|
| ROS | Noetic |
| Gazebo | 11.11.0 |
| python | 3.8.10 |
turtlebot3的安装与仿真环境搭建请看上一篇帖子。
在此基础上,我们需要2个python脚本:key_publisher.py和keys_to_twist_using_rate.py,第一个用于创建节点用来监听键盘敲击并在/key话题上发布类型为std_msgs/String的信息;第二个用于创建节点并发送类型为Twist的名为/cmd_vel消息。
创建新的文件夹/scripts用来防止python脚本,具体内容如下:
1. 监听键盘敲击:key_publisher.py
#!/usr/bin/env python
# -*- coding: UTF-8 -*-"""监听键盘"""
import sys, select, tty, termios
import rospy
from std_msgs.msg import Stringif __name__ == "__main__":key_pub = rospy.Publisher("key", String, queue_size=1)rospy.init_node("keyboard_driver")rate = rospy.Rate(100)old_attr = termios.tcgetattr(sys.stdin)tty.setcbreak(sys.stdin.fileno())print(f"publishing keystrokes. press ctrl-c to exit ...")while not rospy.is_shutdown():if select.select([sys.stdin], [], [], 0)[0] == [sys.stdin]:key_pub.publish(sys.stdin.read(1))rate.sleep()termios.tcsetattr(sys.stdin, termios.TCSADRAIN, old_attr)
2. 控制turtlebot3运动:keys_to_twist_using_rate.py
本文采用的是常用的键盘控制方式,即:w:前进,
x:后退,a:左转,d:右转,s:停止。
#!/usr/bin/env python
# -*- coding: UTF-8 -*-
"""监视键盘,然后发送/cmd_vel,且发送频率稳定"""
import rospy
from std_msgs.msg import String
from geometry_msgs.msg import Twistkey_mapping = {"w":[0, 1], "x":[0, 1],"a":[-1, 0], "d":[1, 0],"s":[0, 0]}
g_last_twist = Nonedef keys_cb(msg, twist_pub):global g_last_twistif len(msg.data)==0 or msg.data[0] not in key_mapping:returnvels = key_mapping[msg.data[0]]g_last_twist.angular.z = vels[0]g_last_twist.linear.x = vels[1]twist_pub.publish(g_last_twist)if __name__ == "__main__":rospy.init_node("key_to_twist")twist_pub = rospy.Publisher("cmd_vel", Twist, queue_size=1)rospy.Subscriber("key", String, keys_cb, twist_pub)rate = rospy.Rate(10)g_last_twist = Twist() # initializes to zerowhile not rospy.is_shutdown():twist_pub.publish(g_last_twist)rate.sleep()
3. 测试
打开4个terminal分别运行以下的命令
roscore
roslaunch turtlebot3_gazebo turtlebot3_world.launch
python scripts/keys_to_twist_using_rate.py
python scripts/key_publisher.py
在这个terminal内敲击键盘可以控制turtlebot3在gazebo中运动,如下图所示:
4. 数据监视
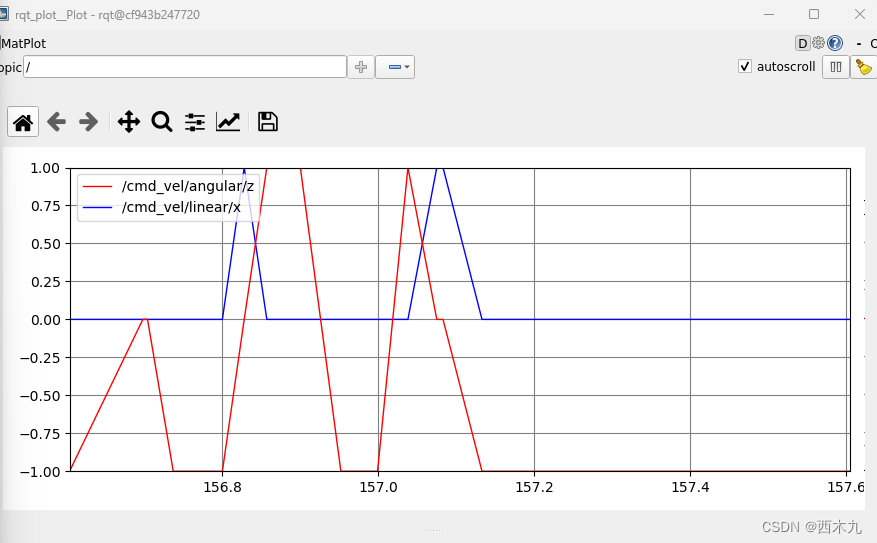
此外,我们可以来监视turtlebot3运动时产生的数据:
rostopic echo cmd_vel

rqt_plot cmd_vel/linear/x cmd_vel/angular/z
这篇关于ros 学习记录(四)仿真环境中键盘控制turtlebot3运动的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!








