toolbox专题

【机器人工具箱Robotics Toolbox开发笔记(二十)】机器人工具箱SerialLink I类函数参数说明
机器人工具箱中的SerialLink表示串联机器人型机器人的具体类。该类使用D-H参数描述,每个关节一组。SerialLink I类包含的参数如表1所示。 表1 SerialLink I类参数 参 数 意 义 参 数 意 义 plot 显示机器人的图形表示 jacobn 工具坐标系中的雅可比矩阵 plot3D 显示机器人3D图形模型 Jacob_dot
用python fastapi写一个http接口,使ros2机器人开始slam toolbox建图
如果你想使用Python的FastAPI框架编写一个HTTP接口,以便通过接口启动ROS 2机器人的SLAM Toolbox建图,可以按照以下方式进行: 首先,确保你已经安装了fastapi和uvicorn库。你可以使用以下命令进行安装: pip install fastapi uvicorn 接下来,创建一个Python文件(例如app.py),并将以下代码添加到文件中: import

【机器人工具箱Robotics Toolbox开发笔记(二)】Matlab中机器人工具箱的下载与安装
Matlab机器人工具箱(Robotics Toolbox)可从Peter Corke教授提供的网站上免费下载。网址为:http://www.petercorke.com/Robotics_Toolbox.html。 图1 网站所提供的机器人工具箱版本 在Downloading the Toolbox栏目中单击here按钮进入下载页面,然后在该页面中填写国家、组织和身份等信息,进入机器人工
【机器人工具箱Robotics Toolbox开发笔记(四)】 机器人位姿变换之位姿变换函数
机器人学的位姿变换相关内容,可以采用下列函数来进行计算。 (1)rpy2r() R = rpy2r (roll, pitch, yaw, options)能够根据一组回转角、俯仰角和偏转角求出对应齐次变换矩阵中的旋转矩阵R(3x3),其中3个角度rpy = [R, P, Y]分别对应于关于x、y、z轴的顺序旋转。 R = rpy2r (rpy, options)与前者相同,但是输入的是一个向量

使用Camera Calibration Toolbox for Matlab进行摄像机标定
Camera Calibration Toolbox for Matlab: http://www.vision.caltech.edu/bouguetj/calib_doc/ 一些摄像机标定的Matlab工具箱(含Kinect和激光):http://blog.exbot.net/archives/60 kinect深度图与摄像头RGB的标定与配准:http://m.blog.csdn

echarts-dataset,graphic,dataZoom, toolbox
dataset数据集配置数据 dataset数据集,也可以完成数据的映射,一般用于一段数据画多个图表 例子: options = {tooltip: {},dataset: {source: [["product", "2015", "2016", "2017"],["test", 10, 20, 30],["aaaa", 5, 15, 25],["bbbb", 12, 22, 32],
matlab-Computer Vision System ToolBox的系统对象使用
(人人网:MATLAB STUDY) 采用基于系统对象vision.X的图像处理,与采用数字图像处理工具箱相比,其优势主要体现在以下两个方面: 1) 运行速度更快; 2) 绝大多数系统函数支持MATLAB的C代码转换功能,可以将其快速地转换为可以运行的C代码。 在MATLAB中,调用计算机视觉工具箱中的vision.GeometricScaler可实现
Android AOSP探索之Ubantu下Toolbox的安装
文章目录 概述安装Toolbox解决运行的问题 概述 由于最近需要进军android的framework,所以需要工具的支持,之前听说江湖上都流传source insight,我去弄了一个破解版,功能确实强大,但是作为多年android开发的我习惯使用android studio。虽然使用source insight比较吃力,但是还是咬牙用了起来,结果是用的次数手指头都能数得过来
ros2小车使用slam-toolbox建图
结果 ros2小车使用toolbox建图 分析 slam-toolbox需要odom和/scan,所以需要有里程计数据和雷达数据才行。里程计由imu和车轮编码器获取,雷达数据由雷达启动后自动发布。
GNU Radio Radar Toolbox编译及安装
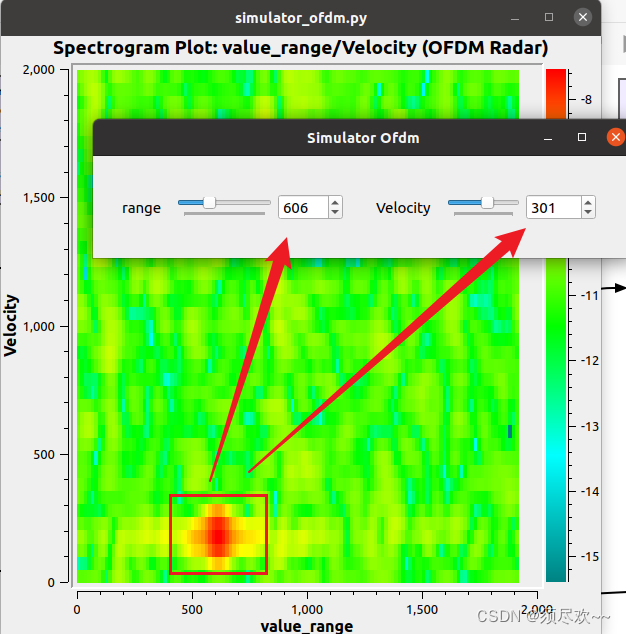
文章目录 前言一、GNU Radio Radar Toolbox 介绍二、gr-radar 安装三、具体使用四、OFDM 雷达仿真 前言 GNU Radio Radar Toolbox(gr-radar)是一个开放源码的工具箱,用于 GNU Radio 生态系统,主要目的是为雷达信号处理提供必要的工具和函数。 本文记录在 GNU Radio Radar Toolbox 的编
【研发日记】Matlab/Simulink开箱报告(十一)——Requirements Toolbox
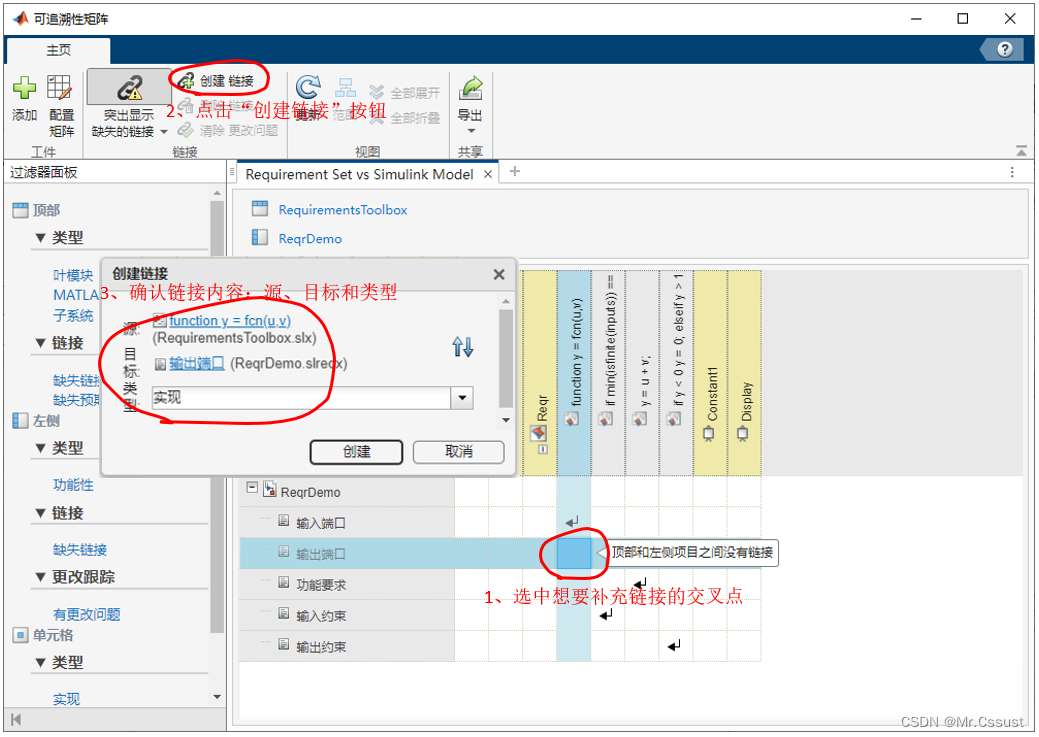
目录 前言 Requirements Toolbox 编写需求 需求联接设计 需求跟踪开发进度 追溯性矩阵 分析和应用 总结 前言 见《开箱报告,Simulink Toolbox库模块使用指南(六)——S-Fuction模块(TLC)》 见《开箱报告,Simulink Toolbox库模块使用指南(七)——S-Fuction Bui
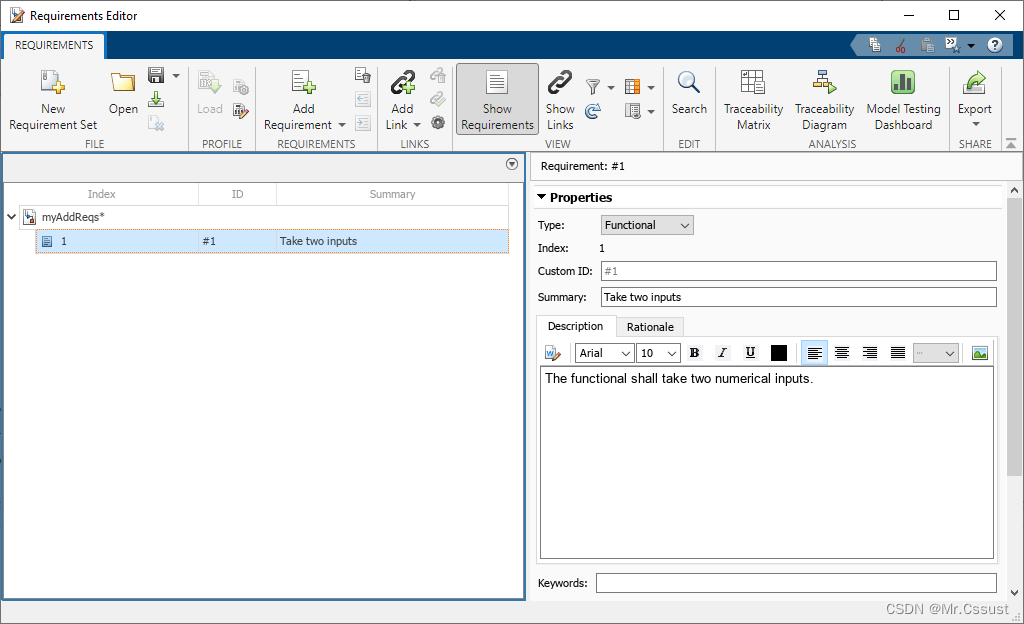
【研发日记】,Matlab/Simulink开箱报告(十)——Requirements Toolbox
前言 见《开箱报告,Simulink Toolbox库模块使用指南(五)——S-Fuction模块(C MEX S-Function)》 见《开箱报告,Simulink Toolbox库模块使用指南(六)——S-Fuction模块(TLC)》 见《开箱报告,Simulink Toolbox库模块使用指南(七)——S-Fuction Bu

Signal Processing Toolbox 快速入门
目录 使用信号分析器 App 工作流 示例 从鲸鱼音频中提取感兴趣的区域 Signal Processing Toolbox™ 提供多种函数和 App,可用于均匀和非均匀采样信号的管理、分析、预处理和特征提取。该工具箱包含可用于滤波器设计和分析、重采样、平滑处理、去趋势和功率谱估计的工具。可以使用信号分析器在时域、频域和时频域中同时可视化和处理信号。借助滤波器设计工具

echarts中toolbox 中文乱码问题
问题描述 本地引用的echarts源文件,页面其他部分编码显示正常,唯独toolbox鼠标悬停在上面时提示信息显示乱码。 如图所示: 尝试过的方法 使用sublime text 3,notepad++,记事本更改文件编码为utf-8引入时,在script标签内加入charset属性<script src='echarts.js' charset='utf-8><
qml中toolbox控件、ComboBox控件、PlainText实现及美化
一. 内容简介 qml中toolbox控件、ComboBox控件、PlainText实现及美化 二. 软件环境 2.1vsCode 2.2Anaconda version: conda 22.9.0 2.3pytorch 安装pytorch(http://t.csdnimg.cn/GVP23) 2.4QT 5.14.1 新版QT6.4,,6.5在线安装经常失败,而5.9版本又无法
MATLAB:Image Processing Toolbox工具箱入门实战
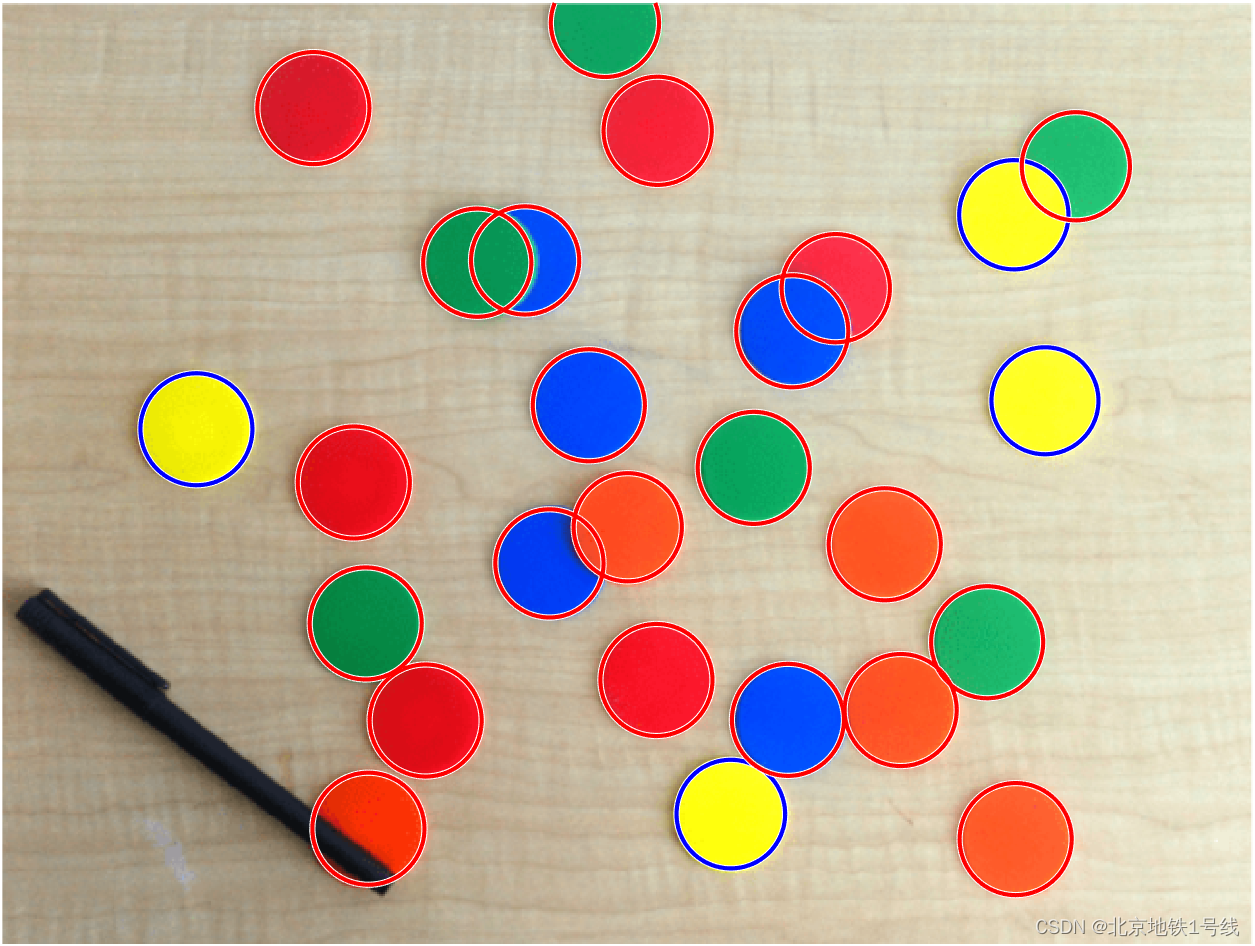
目录 1.基本图像导入、处理和导出 2.实战项目一:利用imfindcircles()函数检测和测量图像中的圆形目标 1.基本图像导入、处理和导出 Basic Image Import, Processing, and Export- MATLAB & SimulinkThis example shows how to read an image into the workspace,
Matlab R2018b 使用Bayes Net Toolbox的经历和问题
安装包的下载与加载主要参考: https://blog.csdn.net/moodytong/article/details/8122327 问题1: 简单案例运行后,图形绘制没有箭头,出现错误提示: 未定义与 ‘matlab.graphics.axis.Axes’ 类型的输入参数相对应的运算符 ‘*’。 出错 arrow (line 393) ax = o * gca; 出错 draw_grap
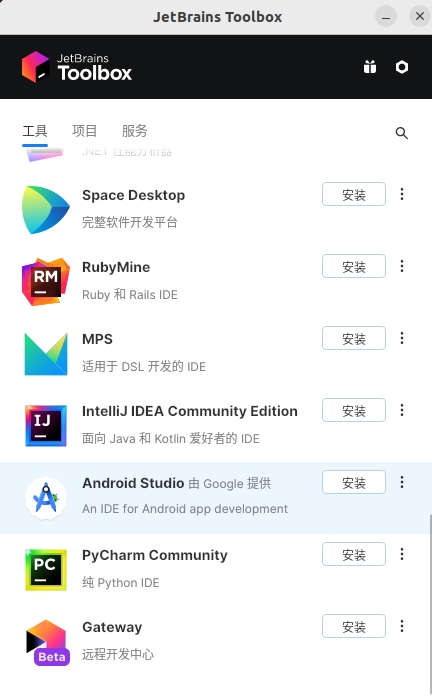
在Ubuntu上安装JetBrains Toolbox并解决libfuse.so.2依赖问题
在安装JetBrains Toolbox的过程中,我们遇到了libfuse.so.2依赖缺失的问题。这个问题通常发生在尝试运行AppImage格式的程序时,如果系统缺少必要的FUSE(Filesystem in Userspace)支持。以下是我在解决这个问题并在Ubuntu上成功安装JetBrains Toolbox的步骤: 下载JetBrains Toolbox 首先,我从官方提供的链接下

DACE- a matlab Kriging toolbox
以下为转帖 http://www2.imm.dtu.dk/projects/dace/ http://www.imm.dtu.dk/~hbni/dace/【已经失效】 对比的工具:https://cn.mathworks.com/matlabcentral/fileexchange/59960-krigingtoolbox DACE A Matlab Krigin

3dmatch-toolbox详细安装教程-Ubuntu14.04
3dmatch-toolbox详细安装教程-Ubuntu14.04 前言docker搭建Ubuntu14.04安装第三方库安装cuda/cundnn安装OpenCV安装Matlab 安装以及运行3dmatch-toolbox1.安装测试3dmatch-toolbox(对齐两个点云) 总结 前言 paper:3DMatch: Learning Local Geometric Des
【Jetbrains全家桶】PyCharm专业版学生用户申请(学信网)+Toolbox App安装配置教程(修改系统、配置和日志目录)
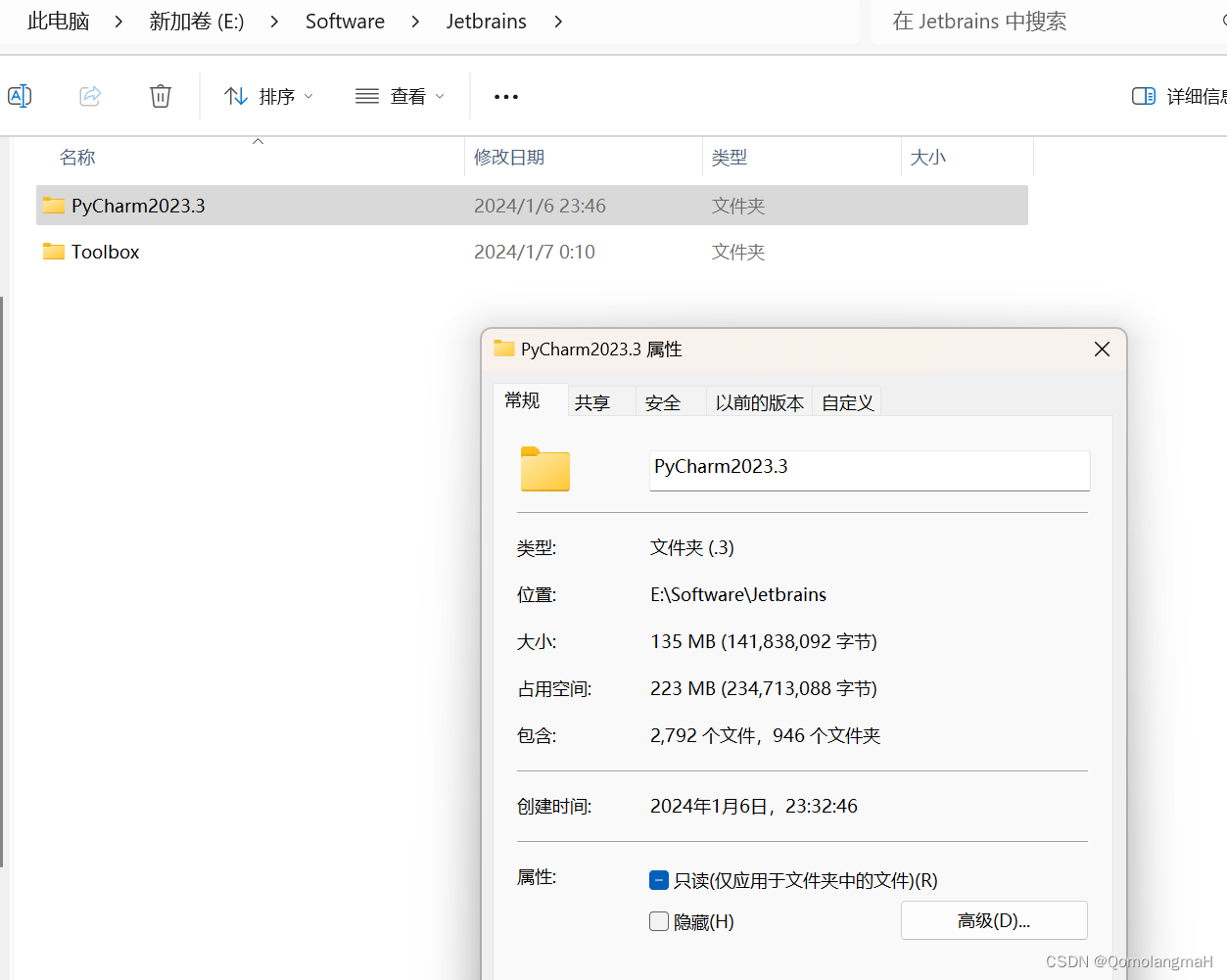
文章目录 一、Jetbrains学生用户免费使用1. [Jetbrains官网](https://www.jetbrains.com.cn/en-us/)新申请更新资料申请界面 2. [学信网](https://www.chsi.com.cn/xlcx/index.jsp)教育部学籍在线验证报告本人身份核验申请报告 二、安装Toolbox App[Toolbox App](https://

MATLAB curve fitting toolbox没有怎么办?
版本:MATLAB R2023b 如果在安装MATLAB时仅仅选择了安装MATLAB,而并未选择其他选项,则在进入MATLAB后会发现顶部的APP栏中无法找到曲线拟合工具箱。 本人跟随MATLAB中的教程进行下载时,出现了如下报错: 最终解决方案:找到MATLAB的安装包,在不卸载原有MATLAB软件的基础上,重新进行安装即可。在安装时记得勾选曲线拟合工具箱。 在产品这一步中,除
matlab Robotics Toolbox
工具箱下载地址:ROBOTICS TOOLBOX 安装教程 笛卡尔运动规划 在MATLAB中,ctraj和jtraj是两个不同的函数,主要用于控制系统和机器人学中的轨迹规划。它们之间的主要区别在于它们处理的问题类型和使用方式。 ctraj(连续时间轨迹规划): ctraj 用于连续时间系统的轨迹规划。这个函数通常用于动态系统,其中状态是连续变化的。它主要用于生成系统状态的时间演化,并通过指
matlab Robotics System Toolbox
笛卡尔运动规划 在MATLAB中,ctraj和jtraj是两个不同的函数,主要用于控制系统和机器人学中的轨迹规划。它们之间的主要区别在于它们处理的问题类型和使用方式。 ctraj(连续时间轨迹规划): ctraj 用于连续时间系统的轨迹规划。这个函数通常用于动态系统,其中状态是连续变化的。它主要用于生成系统状态的时间演化,并通过指定的控制输入实现所需的轨迹。 示例代码: [t, x] = c

docker安装(toolbox)(win10教育版)
安装 电脑是win10教育版不能用最新的 只能用docker toolbox https://docs.docker.com/toolbox/overview/ mac选红框中的链接 1.虚拟化要可以才能用 2.要下载最新版本的Docker Toolbox,请转到Toolbox Releases并下载最新.exe文件。 通过双击安装程序来安装Docker Toolbox。

Fast and flexible X-ray tomography using the ASTRA toolbox
使用ASTRA工具箱进行快速灵活的X射线断层扫描 论文链接:http://dX.doi.org/10.1364/OE.24.025129 项目链接:https://astra-toolboX.com/indeX.html Abstract 从一系列投影图像中重建物体,如在计算机断层扫描(CT)中,是许多不同应用领域的流行工具。现有的商业软件通常为最终用户提供足够精确和方便使用的重建工具