spp专题

SPP/SPPF/Focal Module
一、在图像的分类任务重,卷积神经网络(CNN)一般含有5层: 输入层卷积层激活层池化层全连接层 · 全连接层通常要求输入为一维向量。在CNN中,卷积层和池化层的输出特征图会被展平(flatten)为一维向量,然后作为全连接层的输入。因此,全连接层对输入的尺寸有严格要求。 · 第一个全连接层的输入维度必须与前一层展平后的特征向量的长度一致,这就要求前面的卷积和池化层的输出特征图尺寸必须经过

26. 蓝牙 - SPP开发
1. 概述 耳机连接手机传输数据,除了BLE连接,还可以用BT-SPP协议,即蓝牙串口协议。 2. 遇到问题 2.1 初始的SDK版本,配置 宏:BT_SPP_SUPPORT 设备上电后,会调用 app_tota_init() -> app_spp_tota_init(&app_tota_cb); 应用层直接调用 app_spp_tota_send_data()

区域卷积神经网络(R-CNN,SPP-Net,Fast R-CNN,Faster R-CNN)
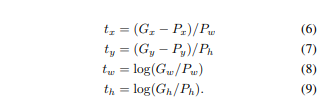
1 模型进化史 检测框架可分为两类: 两级式检测框架,包含一个用于区域提议的预处理步骤,使得整体流程是两级式的,如R-CNN系列单级式检测框架,即无区域提议的框架,这是一种单独提出的方法,不会将检测提议分开,使得整个流程是单级式的,如YOLO系列 2 传统的目标检测 2.1 三个阶段 区域选择利用不同尺寸的滑动窗口框住图中的某一部分作为候选区域。特征提取:提取候选区域相关的
CST电磁仿真软件表面等离子极化激元SPP --- 一维光栅耦合 - 衍射模式, 效率, Floquet端口
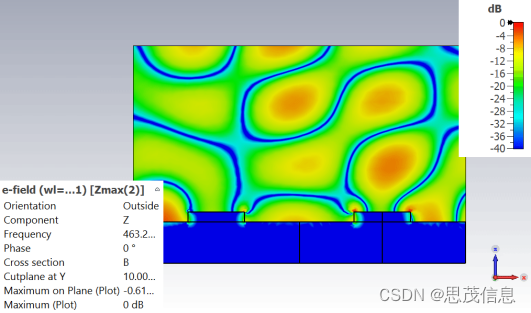
这两期我们看一下衍射光栅的高阶衍射、衍射效率、反射率。具体到仿真设置,就是Floquet端口的模式分析,S参数与衍射效率和反射率的关系。那么研究这些衍射和表面等离子极化激元SPP有什么关系呢?关系可大了,光栅是一种能够用来激励出SPP模式的结构,所以我们要了解其衍射特性,才能激励出表面波SPP。 使用等离子激元单元模板,开启计算透射率反射率吸收率: 添加银材料,画个因材料的基底,这里d是光

SPP/BLE蓝牙双模方案,主从一体,串口速率可达85KB/S
MS-BTD020A是一款蓝牙5.0双模数传模块,支持SPP(经典蓝牙)和BLE(低功耗蓝牙)。蓝牙双模技术使其能够在传统蓝牙和低功耗蓝牙之间无缝切换,用户只需要进行简单的设置就可以实现串口与手机之间的无线传输。模块内集成了丰富的AT指令,用户可以灵活的配置模块的各项参数以满足不同应用场景的需求。速度SPP可达85Kbyte/s,BLE可达65KB/S,可以应用于主从一体数据传输及一对多组

SPP/Fast R-CNN/Faster R-CNN/r fcn
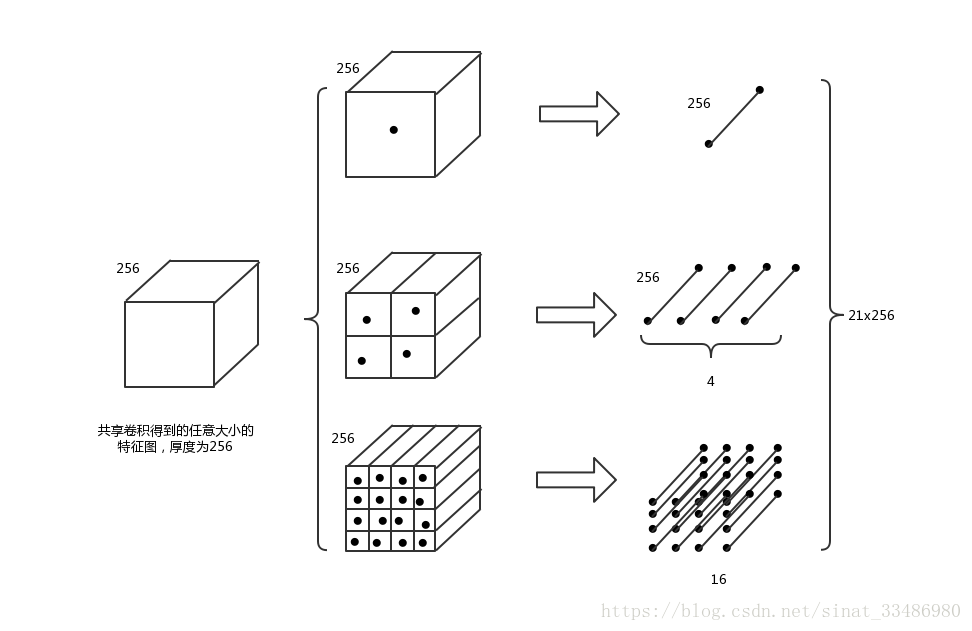
1,SPP spatial pyramid pooling空间金字塔池,基于图像金字塔 SPP-net解决了R-CNN重复提取候选区域特征的问题,同时允许各种尺寸图像作为输入,解决了图像畸变的问题, 2,R-CNN的作用比较强,其主要缺陷就是效率问题: 计算量大,速度慢:每张图像的每个Propasal均需要通过CNN提取高阶特征、SVM进行分类操作。 图像失真:
SPP-Net目标检测算法深度剖析
目录 一、引入SPP-Net 二、SPP-Net简介 三、网络架构 四、总结 论文地址 :https://arxiv.org/abs/1406.4729 一、引入SPP-Net 为何们猛然间对SPP-Net起了好奇之心呢?因为在学习R-CNN系列算法的时候,总有资料提到SPP-Net(Spatial Pyramid Pooling-Net)算法(其实是一种深度学习

目标检测:SPP-net
《Spatial Pyramid Pooling in Deep Convolutional Networks for Visual Recognition》论文解读 本文来自Kaiming He大神。 上文说到R-CNN的最大瓶颈是2k个候选区域都要经过一次CNN,速度非常慢。Kaiming He大神最先对此作出改进,提出了SPP-net,最大的改进是只需要将原图输入一次,就可以得到每个

YOLOv7创新改进:SPPF创新涨点篇 | SPPELAN:SPP创新结合ELAN ,效果优于SPP、SPPF| YOLOv9
💡💡💡本文独家改进:新颖SPPF创新涨点改进,SPP创新结合ELAN,来自于YOLOv9,助力YOLOv7,将SPPELAN代替原始的SPPF SPPELAN结构图如下: 💡💡💡在多个私有数据集和公开数据集VisDrone2019、PASCAL VOC实现涨点 收录 YOLOv7原创自研 https://blog.csdn.net/m0_6377

Jetson Nano 【14】Pytorch的YOLOv3 spp 模型中关于tensorRT+ 矩形推理问题的解决过程
文章目录 背景说明最终效果实现过程矩形推理在整体流程中的位置图形数据输入处理推理输出接收 总结git地址 背景说明 模型是YOLOv3 spp框架是Pytorch由于我的Nano上GPU计算资源不够,所以我们急需减少模型计算量,在剪枝与量化+转tensorRT后从500ms达到了85ms每张,但依然达不到要求,于是想到了矩形推理。 最终效果 在256x416的视频中实现
SPP改进(多窗口池化)
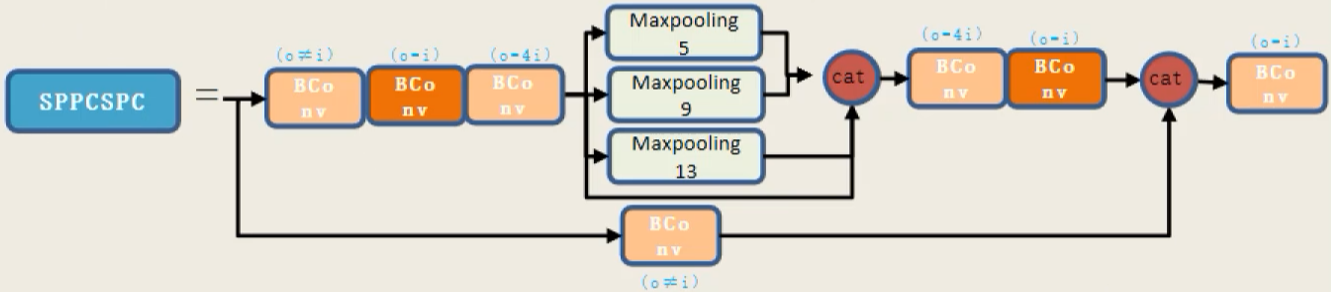
论文创新点汇总:人工智能论文通用创新点(持续更新中...)-CSDN博客 原来的模型 15年提出 本质: 多个不同大小的池化窗口进行池化 池化窗口越大得到的特征越少 之后再将不同池化窗口得到的特征拼接起来 现在的改进 实现代码 class SPPCSPC(nn.Module):# CSP https://github.com/WongKinYiu/CrossStagePa

Raspberry Pi 4B 蓝牙串口(SPP)配置与使用
Raspberry Pi 4B 蓝牙串口(SPP)配置与使用 文章目录 Raspberry Pi 4B 蓝牙串口(SPP)配置与使用1、蓝牙相关命令工具2、Linux中的蓝牙堆栈3、蓝牙串口配置4、蓝牙串口数据发送与接收 本文将详细介绍如何在Raspberry Pi 4B卡片电脑中配置并使用蓝牙串口 (SPP)。 1、蓝牙相关命令工具 Linux、Android、Wind

深入浅出理解SPP、ASPP、DSPP、MDSPP空间金字塔池化系列结构(综合版)
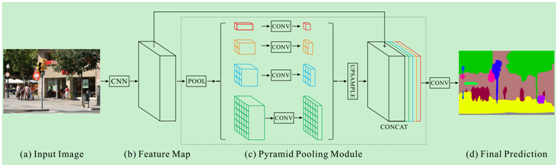
一、参考资料 目标检测:SPP-net SPP原理及实现 金字塔池化系列的理解SPP、ASPP SPP,PPM、ASPP和FPN结构理解和总结 二、空间金字塔池化(SPP) 原始论文:[1] 1. 引言 传统的卷积神经网络中,池化层通常采用固定的池化层级和固定的池化大小,这种方法对于不同大小的输入图像会导致信息的丢失,从而影响模型的准确性。而SPP空间金字塔池化方法则可以自适应地对不同大
算法笔记(七)扩大感受野SPP/ASPP/RBF
1.空洞卷积 想要获取较大感受野需要用较大的卷积核或池化时采用较大的stride,对于前者计算量太大,后者会损失分辨率。然而想要对图片提取的特征具有较大的感受野,并且又想让特征图的分辨率不下降太多(分辨率损失太多会丢失许多关于图像边界的细节信息),但这两个是矛盾的。而空洞卷积就是用来解决这个矛盾的。即可让其获得较大感受野,又可让分辨率不损失太多。空洞卷积如下图: (a)是rate=1的空洞卷
【杰理】SPP篇需要注意
若发送过程中出现 pend_for_tx_bulk 的打印,可在app_config.h适当增大底层缓存BUF CONFIG_BT_TX_BUFF_SIZE ,例如改成12K,但最大不能超过20K
目标检测-Two Stage-SPP Net
文章目录 前言一、SPP Net 的网络结构和流程二、SPP的创新点总结 前言 SPP Net:Spatial Pyramid Pooling Net(空间金字塔池化网络) SPP-Net是出自何凯明教授于2015年发表在IEEE上的论文-《Spatial Pyramid Pooling in Deep ConvolutionalNetworks for Visua

解读SPP / SPPF / SimSPPF / ASPP / RFB / SPPCSPC
SPP与SPPF 一、SPP的应用的背景 在卷积神经网络中我们经常看到固定输入的设计,但是如果我们输入的不能是固定尺寸的该怎么办呢? 通常来说,我们有以下几种方法: (1)对输入进行resize操作,让他们统统变成你设计的层的输入规格那样。但是这样过于暴力直接,可能会丢失很多信息或者多出很多不该有的信息(图片变形等),影响最终的结果。 (2)替换网络中的全连接层,对最后的卷积层使用globa
解读SPP / SPPF / SimSPPF / ASPP / RFB / SPPCSPC
SPP与SPPF 一、SPP的应用的背景 在卷积神经网络中我们经常看到固定输入的设计,但是如果我们输入的不能是固定尺寸的该怎么办呢? 通常来说,我们有以下几种方法: (1)对输入进行resize操作,让他们统统变成你设计的层的输入规格那样。但是这样过于暴力直接,可能会丢失很多信息或者多出很多不该有的信息(图片变形等),影响最终的结果。 (2)替换网络中的全连接层,对最后的卷积层使用globa
SPP Net 空间金字塔池化原理
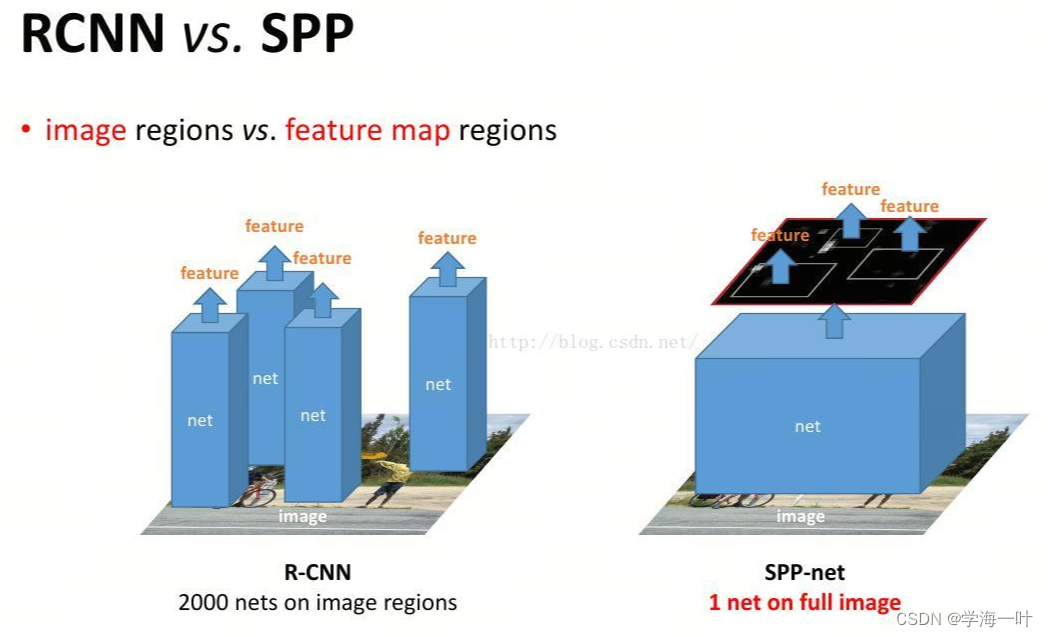
首先对比一下RCNN和SPPNet的流程: 上面是RCNN流程,下面是SPPNet流程。 两者的共同点:都要先使用selective search选取可能的区域。 两者的不同点:RCNN对选择出来的每个图像区域进行卷积,提取特征,而SPPnet使用共享卷积,对输入图像进行一次卷积即可,然后将选择出来的每个图像区域通过坐标映射,对应到特征图上。 这是SPPnet的改进之处了,原来RC
[SPOJ SPP] Recursive Sequence (Version II) 矩阵加速
如果不求和这道题就变成了UVA10870(以前发过,不多说) 加入求和后就需要更改之前的矩阵了 首先保存有关项是必要的 这关系到递推的进行 但是需要额外加入一项 那就是前N项和 这个何又上一次的前N项和 + 前面存下来的相关项乘系数相加得到 例如Fib数列 构造如下矩阵 1 1 2 第一项 第二项 和 那么得到他的计算矩阵 0
空间金字塔池化(SPP,Spatial Pyramid Pooling)系列
空间金字塔池化的作用是解决输入图片大小不一造成的缺陷,同时在目标识别中增加了精度。空间金字塔池化可以使得任意大小的特征图都能够转换成固定大小的特征向量,下面针对一些典型的空间金字塔进行盘点。 部分图片来自blog:空间金字塔池化改进 SPP / SPPF / SimSPPF / ASPP / RFB / SPPCSPC / SPPFCSPC_金字塔池化模块-CSDN博客, 侵删 (1)SPP,
YOLOv5算法进阶改进(7)— 将主干网络SPPF更换为SimSPPF / SPP-CSPC / SPPF-CSPC
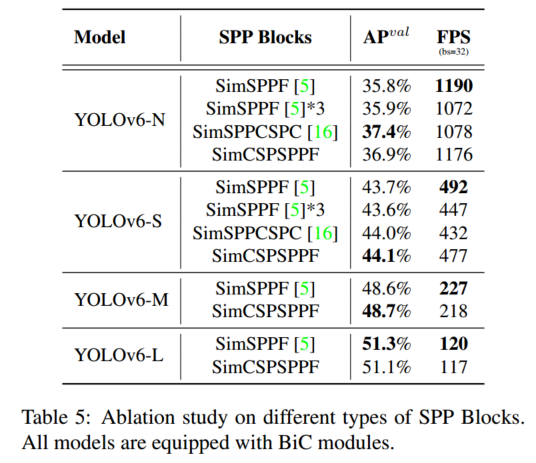
前言:Hello大家好,我是小哥谈。SimSPPF是YOLOv6中提出的一种改进的空间金字塔池化方法,它是SPPF的升级版。SimSPPF通过在不同尺度上使用不同大小的池化核来提取特征,从而提高了检测器的性能。与SPPF相比,SimSPPF可以在不增加计算成本的情况下提高检测器的性能。本节课就教大家如何将主干网络中的SPPF更换为SimSPPF / SPP-CSPC / SPPF-CSPC,
RTKLIB学习(一)--spp代码分析
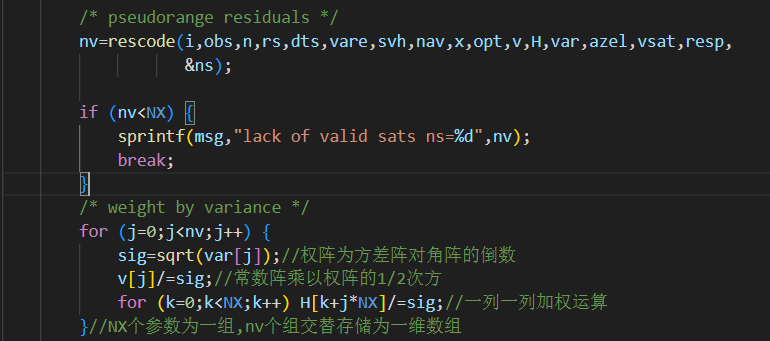
总纲: 我计划对RTKLIB学习 的目标是掌握PPP流程与逻辑,但先掌握比较简单的spp定位对PPP的学习还是有一些帮助的,尤其先在spp熟悉一些共有的数据结构和rtcmn.c中大量重合的函数后,对PPP学习应该不会太难。 本文内容先列出spp实现定位主要功能函数pntpos.c,在对其实现流程做大概阐述(并附上其他免费优秀博主的spp文章),重要的一环是对sp

蓝牙协议栈 串口协议SPP(Serial Port Profile) 连接/接受数据/发送数据/断开连接 流程介绍 让蓝牙实现发送自定义数据
零. 概述 本文章主要讲下蓝牙串口协议SPP(Serial Port Profile)连接/接受数据/发送数据/断开连接的流程介绍,可能之前的写的底层文章你看的云里雾里,此小节就是开发从应用Profile层面来把整个地方串起来,让你们对协议栈有一个更深刻的认识。 一. 声明 本专栏文章我们会以连载的方式持续更新,本专栏计划更新内容如下: 第一篇:蓝牙综合介绍 ,主要介绍蓝牙的一些概念,

【目标检测】YOLOv3-SPP ,在YOLOv3中增加SPP模块
文章目录 一、YOLOv3模型结构二、YOLOv3-SPP模型结构三、SPP模块四、对YOLOv3-SPP模型结构的理解 SPP全称为Spatial Pyramid Pooling(空间金字塔池化结构) 参考资料:YOLO系列理论合集(YOLOv1~v3) yolov3-spp深度剖析 一、YOLOv3模型结构 二、YOLOv3-SPP模型结构 三、SPP模块
