ros1专题

ROS1 + Realsense d455 固件安装+读取rostopic数据
目录 安装固件(一定要匹配)ROS1 wrapper 安装方法Realsense SDK 安装方法Realsense Firmware 安装方法 修改roslaunch配置文件,打开双目图像和IMU数据其他坑点参考链接 安装固件(一定要匹配) 如果你是使用ROS1获取realsense数据的话,一定要注意,SDK, Firmware的版本不是越新越好!!,这是因为intel已经不

三维坐标的旋转矩阵转换测试Demo(ROS1 RVIZ)
已知空间上的某一个点P在坐标系1下的位置为 P1(1,2,3),需要求出P在三维空间坐标系0之间的相对关系,其中坐标系1是相对于坐标系0绕着x轴旋转60度后转化。示意如下图 程序设计 定义P点在坐标系1下的位置 array = np.array([1,2,3])# [1 2 3] 定义坐标系1和坐标系0之间的旋转矩阵 PI = 3.14angle = 60/360*PItrans

带颜色的3D点云数据发布到ros1中(通过rviz显示)python、C++
ros中发布点云数据xyz以及带颜色的点云数据xyzrgb ros中发布点云数据xyz可以直接用python来做或者C++(看个人偏好) ros中发布带颜色的点云数据xyzrgb环境1.新建ROS工作空间2.创建功能包 ros中发布点云数据xyz 可以直接用python来做或者C++(看个人偏好) 在这里我们带有颜色的点云数据格式为x y z c 其中c值为float型,有四

【ROS1转ROS2示例】
ROS1中的代码: 这是一个循环函数: ros::Rate loop_rate(10); // Adjust the publishing rate as neededwhile (ros::ok()){loop_rate.sleep();} 如果转ROS2,可以使用rclcpp::WallRate或者直接依赖于执行器(Executor)的循环来实现类似的功能。这里提供两种方法: 方
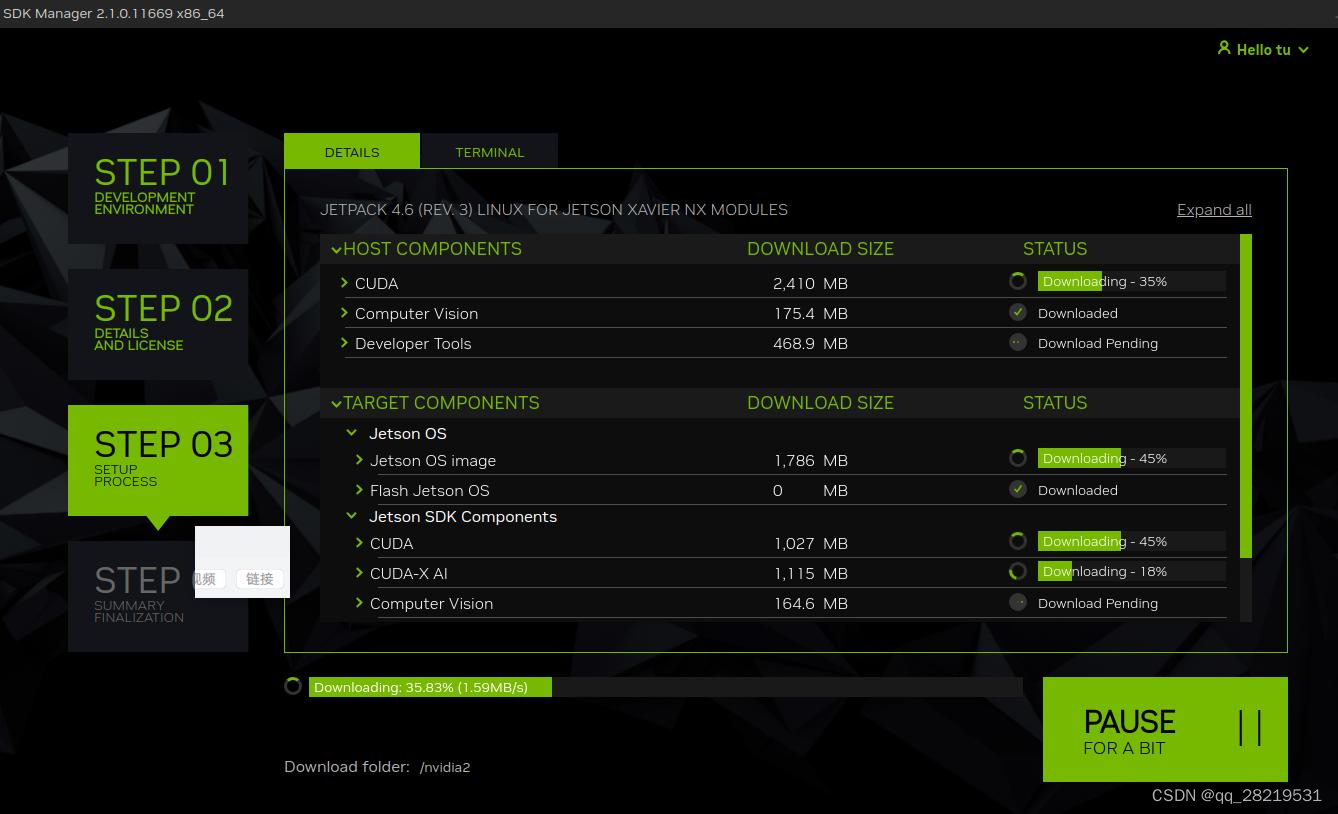
制作ubuntu18.04 cuda10.2+ROS1的 docker镜像
使用的硬件平台为Xavier NX,系统环境如下图: 搭建docker环境需求跟实际环境一致如下图: 从官网获取cuda10.2版本只有支持x86的,如下网站: https://developer.nvidia.com/cuda-10.2-download-archive 下面从sdk manager中获取方法的进行从论坛中获取: https://forums.developer.nvidia.

ROS1配置husky仿真环境遇到的一些问题+方法论
ROS 系列学习教程(总目录) 本文目录 一、问题描述二、问题分析2.1 分析日志2.2 尝试一(失败)2.3 尝试二(成功) 三、husky仿真需要安装的软件包四、总结 - 方法论4.1 文件路径不合法4.2 文件内容不合法4.3 ROS 环境变量4.3.1 方法一4.3.2 方法二 五、源码下载 一、问题描述 从github下载husky源码,加工作空间,编译,加环境
ubuntu 18.04 ros1学习
总结了一下,学习内容主要有: 1.ubuntu的基础命令 pwd: 获得当前路径 cd: 进入或者退出一个目录 ls:列举该文件夹下的所有文件名称 mv 移动一个文件到另一个目录中 cp 拷贝一个文件到另一个目录中 rm -r 删除文件 gedit sudo 给予管理员权限 sudo apt-get install sud

【ROS1总结】使用bloom-generat打包ROS包生成debian安装包
> 说明:<br><br> > 本文首发于 Playfish Blog,转载请保留链接。 前言 在之前的博客中,介绍了ROS包的编写,在本节中将讲述如何将之前写的ROS包打包成debian安装包形式,打包成debian安装包形式有很多,例如: 将ros包开源至github,利用ros自动生成到构建仓库(buildform) 在本地将ros包打包成debian,不需要上传到github
【ROS总结】发布ROS1包之文档编写
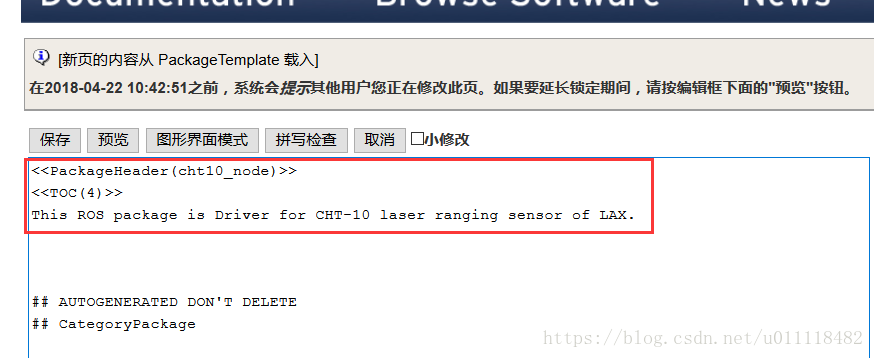
前言 在上一节中,讲述了如何发布一个包到ROS社区,这一节将讲述,如何在wiki界面编写ROS包说明文档、教程。 步骤如下: 登录wiki官网,创建界面编辑账号向ROS社区提交wiki页面编辑权限,取得白名单编辑ROS包文档 创建wiki账号 登录wiki.ros.org,选择登录,创建账户 输入用户名密码 创建完成后,选择登录,登录成功会将显示:

【ROS总结】发布ROS1包到ROS版本
前言 在ROS开发过程中,想要发布自己的包贡献到ROS社区,也就是想要自己的包可以通过apt-get的形式进行下载,这样可以避免每次源码编译的时候会遇到很多坑的情况,不过想要发布ROS包到ROS社区需要如下能力: 长期维护能力:ROS包会一直迭代更新,因此自己的包也应具有长期维护能力,当然,稳定版本后可以不用长期维护。开源精神:因为ROS包遵循BSD协议,会要求将包开源后才可以上传到ROS社区

ubuntu 22.04 apt非源码安装ros1 noetic
教程 https://zhuanlan.zhihu.com/p/679914618?utm_id=0 文章目录 安装安装后配置验证安装卸载 安装 添加源: echo "deb [trusted=yes arch=amd64] http://deb.repo.autolabor.com.cn jammy main" | sudo tee /etc/apt/sources.li
jetson tx2 nx实现在ros1中yolov5实现
亲测用以下链接实现功能。 安装ros。Ubuntu18.04安装ROS Melodic(详细,亲测安装完成,有清晰的截图步骤)_ubuntu 18 ros melodic-CSDN博客文章浏览阅读10w+次,点赞835次,收藏3.8k次。这也是我在ubuntu里面安装ROS的第N次,为了避免自己以后出现问题再安装时,所以写这篇博客总结一下,这次是我安装最快,问题最少也最好解决的一次,在网上看了
ROS1快速入门学习笔记 - 014launch启动文件的使用方法
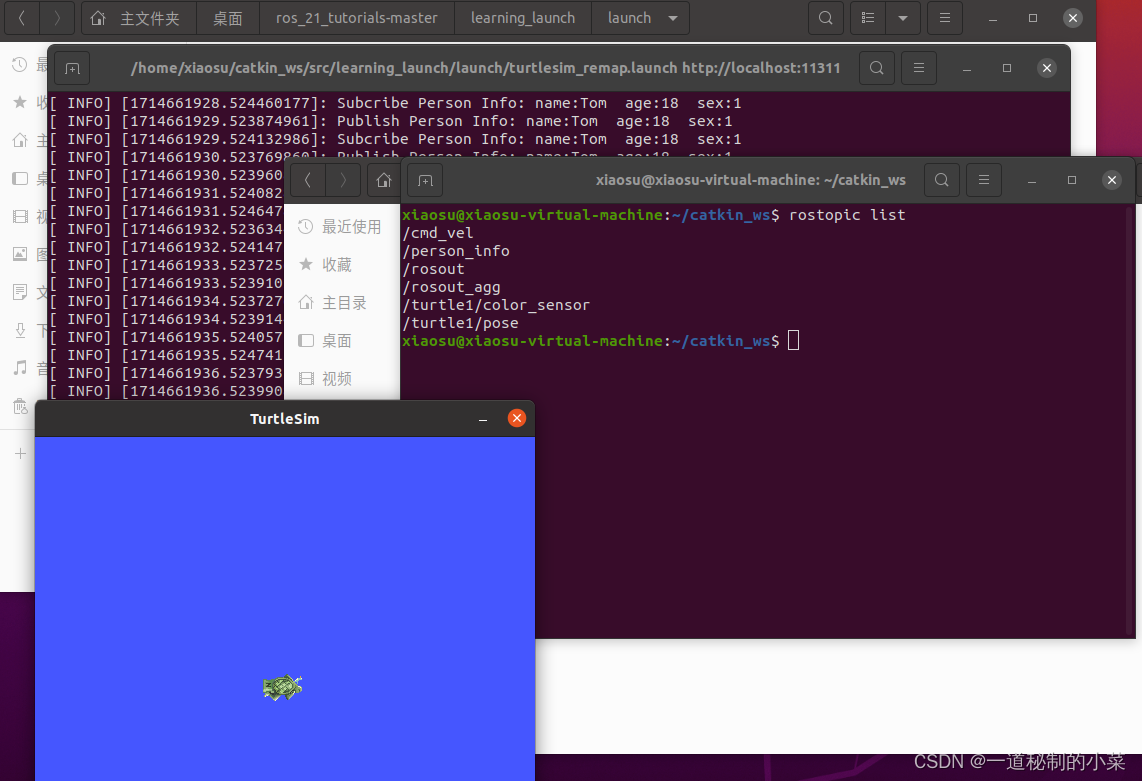
一、定义 Launch文件:通过XML文件实现多节点的配置和启动(可自动启动ROSMaster) 二、常用语法 1. 根标签 <launch> - launch文件中的根元素采用<launch>标签定义 <launch>表示开始;<launch>表示结束; 2. 启动节点 <node pkg = "package-name"type="executable-name" name=
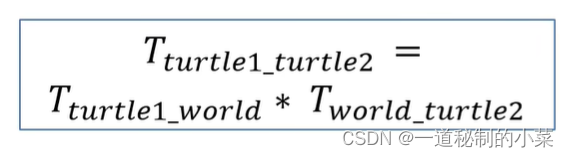
ROS1快速入门学习笔记 - 12ROS中的坐标管理系统
目录 一、机器人作中的坐标变换 二、海龟案例 一、机器人作中的坐标变换 TF功能包能干什么? 五秒钟之前,机器人头部坐标系相对于全局坐标系的关系是什么样子的?机器人夹取的物体i相对于机器人中心坐标系的位置在哪里?机器人中心坐标系相对于全局坐标系的位置在哪里? 具有时间属性,默认可以记录十秒钟之内机器人所有的坐标系之间的位置关系。 TF坐标转换如何实现? 广播TF变换监听T

ROS1快速入门学习笔记 - 10服务数据的定义和使用
目录 一、服务模型(客户端/服务器) 二、自定义服务数据 1. 定义srv文件 2. 在package.xml中添加功能包依赖 3. 在CMakeLists.txt添加编译选项 4. 编译生成语言相关文件 5. 配置服务器/客户端代码编译规则 6. 编译并运行程序 7. Python文件 一、服务模型(客户端/服务器) 二、自定义服务数据 1. 定义sr

奥比中光Astra RGBD ROS1配置(乐视RGBD)
早年买了一款乐视RGBD一直落灰,最近做一个机器人项目想重新使用起来。发现官方给的RGBD包和github上面的ros_astra_camera包并不能很好的驱动这款相机。研究了一下进行补足。 最终的结果是彩色,红外以及深度退昂均能实时读取。具体过程如下: 安装配置 安装依赖 sudo apt install ros-$ROS_DISTRO-rgbd-launch ros-$ROS

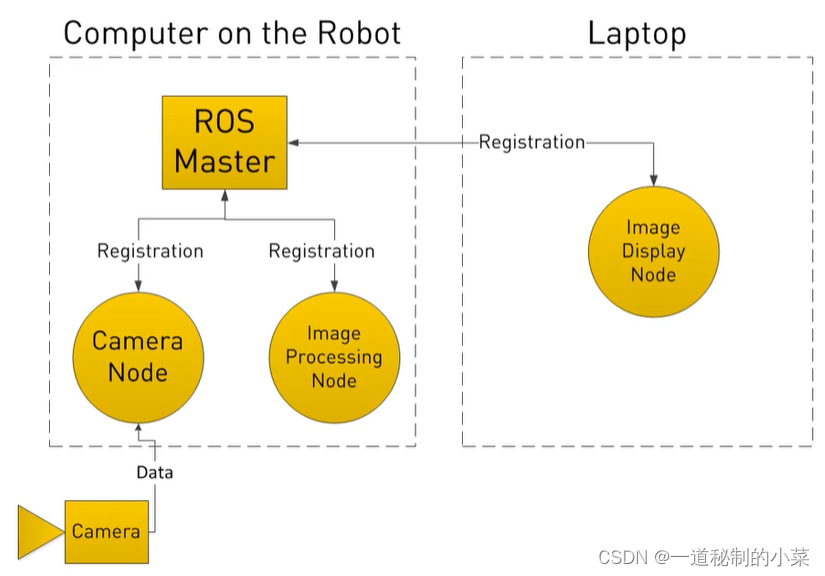
ROS1快速入门学习笔记 - 05发布者Publisher编程的实现
目录 一、话题模型(发布/订阅) 二、实现步骤 1. 创建一个功能包 2. C++代码的实现 3. 配置发布者代码编译规则 4. 编译并运行发布者 5. Python代码的实现 一、话题模型(发布/订阅) 二、实现步骤 1. 创建一个功能包 $ cd~/catkin_ws/src$ catkin_create_pkg learning_topic ros
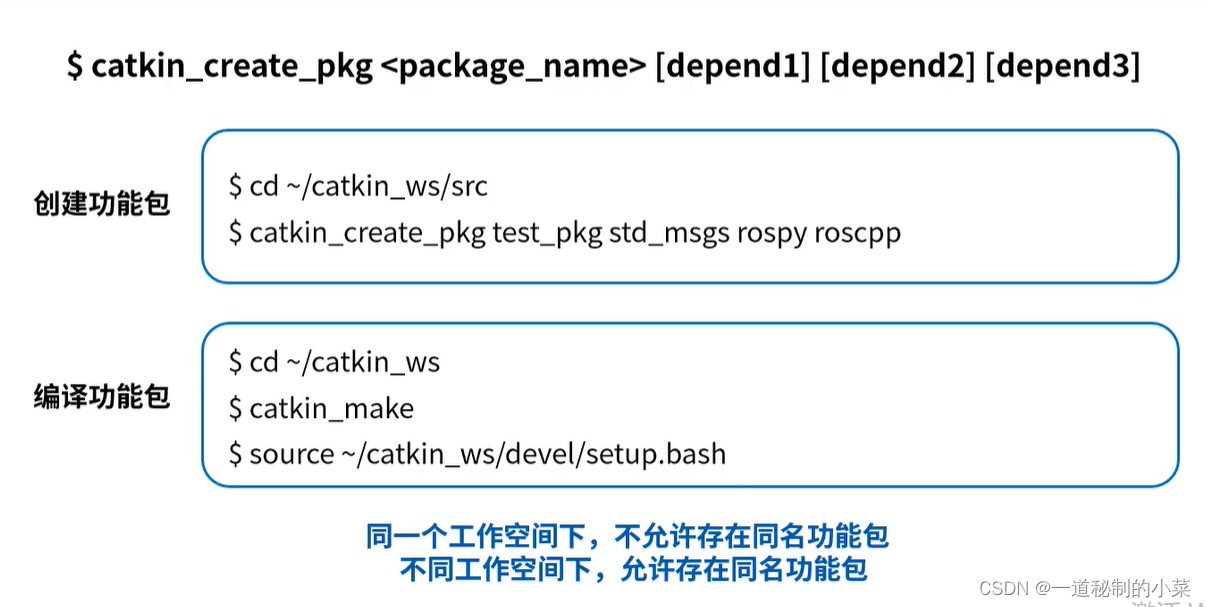
ROS1快速入门学习笔记 - 04创建工作环境与功能包
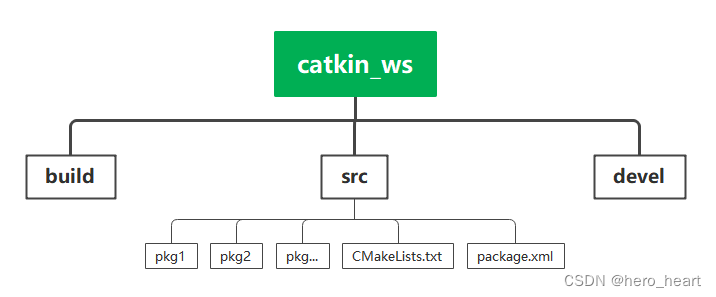
一、定义 工作空间(workspace)是一个存放工程开发相关文件的文件夹。 src:代码空间(Source Space)build: 编辑空间(Build Space)devel:开发空间(Development Space)install:安装空间(Install Space) 二、创建工作空间 1. 创建工作空间 mkdir -p ~/catkin_ws/src cd~/ca

vscode 如何断点调试ros1工程
在vscode中断点调试ros1工程主要分为以下几步: 1. 第一步就是修改cmakelist.txt,到调试模式。 将CMAKE_BUILD_TYPE原来对应的代码注释掉,原来的一般都不是调试模式。加上下面一行代码,意思是设置调试模式。 # 断点调试SET(CMAKE_BUILD_TYPE "RelWithDebInfo") 然后打开终端进行编译。 最后在终端中先source 当前
ROS1快速入门学习笔记 - 02ROS相关介绍
一、什么是ROS? ROS = 通信机制 + 开发工具 + 应用功能 + 生态系统 目的:提高机器人在研发中的软件复用率 1. 通信机制 2. 开发工具 3. 应用功能 4. 生态系统 二、ROS的核心概念 1. 节点(Node)-- 执行单元 执行具体任务的进程、独立运行的可执行文件;(类似于Windows中的exe文件)在不同节点可使用不同的编程语言,
ROS1快速入门学习笔记 - 01Linux基础
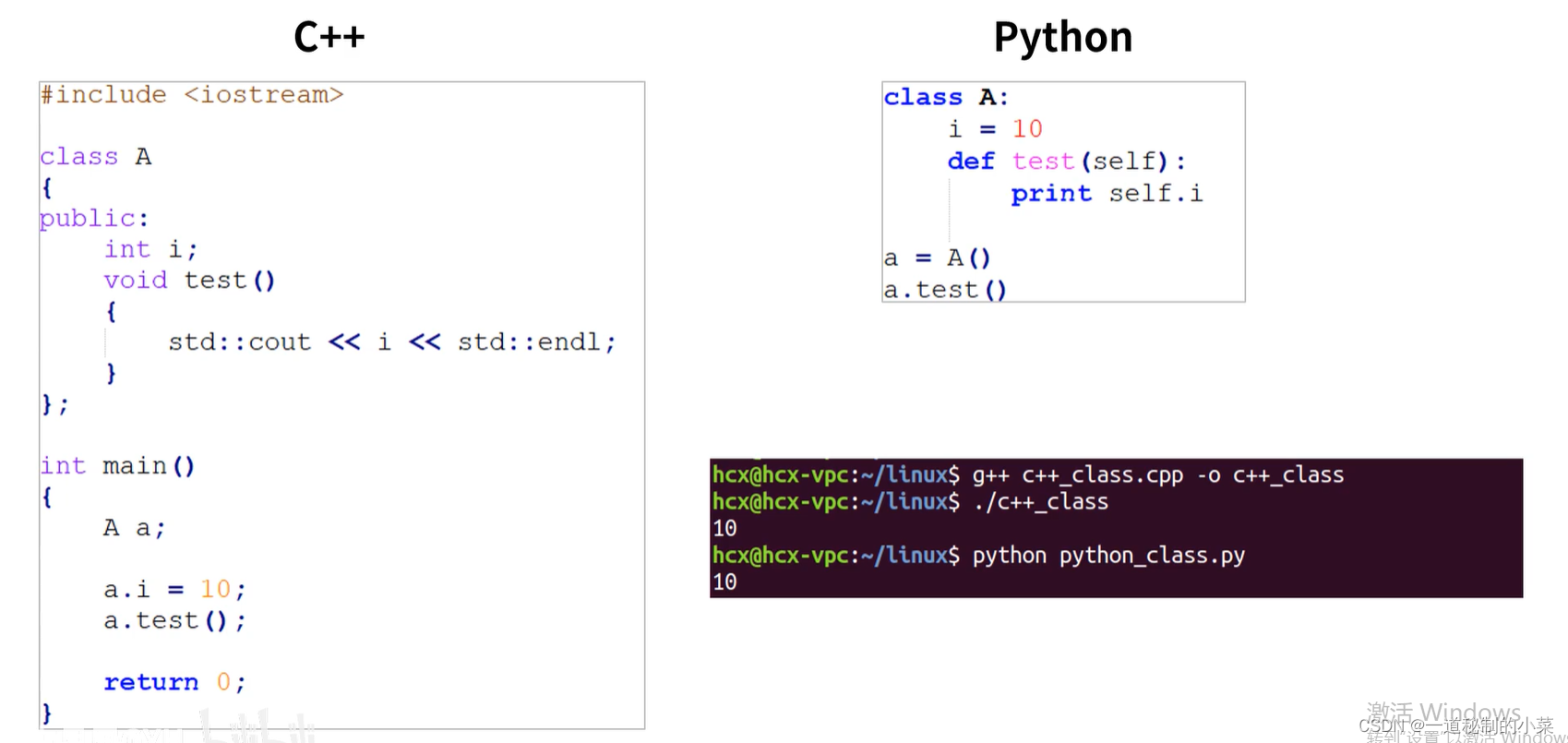
目录 一、Linux极简基础 二、C++与Python极简基础 1. for循环 2. while循环 3. 面向对象 一、Linux极简基础 终端快捷键:ctrl+alt+t 命令行的操作方式 查看当前终端所在路径:pwd切换路径cd;例如cd /home/ 进入home文件夹;cd ..(中间有空格)表示跳回上一级目录创建文件夹mkdlr:例如mkdlr test_
【ros2】ros1和ros2可以同时在一台机器上运行吗
可以,ROS 1 和 ROS 2 是两个不同版本的 Robot Operating System (ROS),它们分别有着各自的架构、消息传递机制以及配套工具集。尽管存在这些差异,ROS 1 和 ROS 2 可以在同一台 Ubuntu 系统上共存并独立运行。以下是一些关键点来说明如何实现这一共存情况以及需要注意的事项: 独立安装与配置: 分别按照各自的官方文档或教程为 ROS 1 和 ROS
利用TCP发布GNSS数据(ROS2转ROS1)
文章目录 服务端(ROS2)客户端(ROS1) 服务端(ROS2) #include <memory>#include <iostream>#include <sstream>#include <string>#include <sys/socket.h>#include <netinet/in.h>#include <unistd.h>#include <cstr

ubuntu20.04 安装ros1
详细介绍如何在ubuntu20.04中安装ROS系统,超快完成安装(最新版教程)_ubuntu安装ros-CSDN博客Ros noetic : XTDrone安装-CSDN博客 gazebo11卸载,安装gazebo9 我的ROS学习日记-环境搭建 - 知乎 需要选择分支 GitHub - ros-simulation/gazebo_ros_pkgs: Wrappers, to
ROS1/2机器人课程的价值和规模
价值用价格,规模用销量。 免费的ROS1/2课程也很多。 2023版,15元,24人。 2022版,1.99元,21人。 价格不贵,人数很少,店家也很少。 当然,有朋友说,有免费冲击,网上各类资源冲击。那就再举个例子,比如考研,免费资料超多,网上各种资料超多,如下销量,仅为一家店铺,销量超过1万+店铺,18家,而且仅仅是统计了一个网购平台的量。

ROS2从入门到精通0-2:ROS2简介、对比ROS1与详细安装流程
目录 0 专栏介绍1 什么是机器人操作系统?2 ROS的发展历程3 ROS2与ROS1的区别4 ROS2安装4.1 基本安装4.2 测试ROS24.2.1 测试一:发布者与订阅者4.2.2 测试二:海龟仿真器 5 常见问题 0 专栏介绍 本专栏旨在通过对ROS2的系统学习,掌握ROS2底层基本分布式原理,并具有机器人建模和应用ROS2进行实际项目的开发和调试的工程能力。 🚀