本文主要是介绍【ROS总结】发布ROS1包到ROS版本,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
前言
在ROS开发过程中,想要发布自己的包贡献到ROS社区,也就是想要自己的包可以通过apt-get的形式进行下载,这样可以避免每次源码编译的时候会遇到很多坑的情况,不过想要发布ROS包到ROS社区需要如下能力:
- 长期维护能力:ROS包会一直迭代更新,因此自己的包也应具有长期维护能力,当然,稳定版本后可以不用长期维护。
- 开源精神:因为ROS包遵循BSD协议,会要求将包开源后才可以上传到ROS社区,所以将自己的包发布到ROS社区,最好有开源精神。
- 文档更新:包的更新也伴随这文档更新,当然也不是绝对的,不过最好有包的使用文档,也就是wiki上。
如果以上的可以做到,那么,恭喜你,可以作为开源成员加入到ROS大家庭来,开源自己代码,共享社区。
本教程只是单纯的介绍如何发布自己的包到ROS社区,并且,发布后如何通过apt-get获取下载,关于文档界面编写,也就是wiki说明,会在后面进行说明。
一般发布自己ROS包有如下步骤:
- 具有github账号与要发布的存储库地址,发布存储库(bloom-release生成的包路径),wiki白名单(文档界面做准备)
- 发布前准备工作,bloom安装(ROS1推荐使用bloom-release进行一键操作)
- 同步到ROS社区
- 等待ROS社区的ROS包版本迭代
- 编辑wiki文档教程
以上步骤完成后,就可以进行apt-get形式下载自己的包了。假如自己的包为cht10_node,那么可以使用如下命令进行安装:
sudo apt-get install ros-<rosdistro>-cht10-node其中将<rosdistro>替换成自己的ROS版本,也就是自己的包发布到的ROS版本中,比如自己的包发布到了kinetic中,那么就是:
sudo apt-get install ros-kinetic-cht10-node注意:并不是自己把包发布到ROS社区就等于所有的ROS版本都可以下载,只有发布到对应ROS版本才可以。也就是说要想把自己的包发布到ROS所有版本,必须把自己的包发布到所有的版本中,比如Indigo、Jade、Kinetic、Luna、Melodic中。
ROS发布需要bloom-release包,我已经将ROS的bloom-release包如何使用翻译到wiki上,大家可以查看教程
http://wiki.ros.org/cn/bloom
或者查看英文教程:
http://wiki.ros.org/bloom
以后会编写如何发布ROS2的包到ROS社区教程。
大家也可以看Mastering ROS for Robotics Programming中的Maintaining the ROS package 部分。
Mastering ROS for Robotics Programming书籍下载:https://download.csdn.net/download/u011118482/10402380
包含英文和中文翻译。
没有0积分下载,大家也可以进入ROS群进行下载。
发布前的准备
创建github存储库
登录http://github.com/,创建自己的github账号,创建完成后,创建要发布的ROS存储库,例如包名为之前教程的cht10_node,那么创建cht10_node目录。
我的存储库为:https://github.com/Playfish/cht10_node
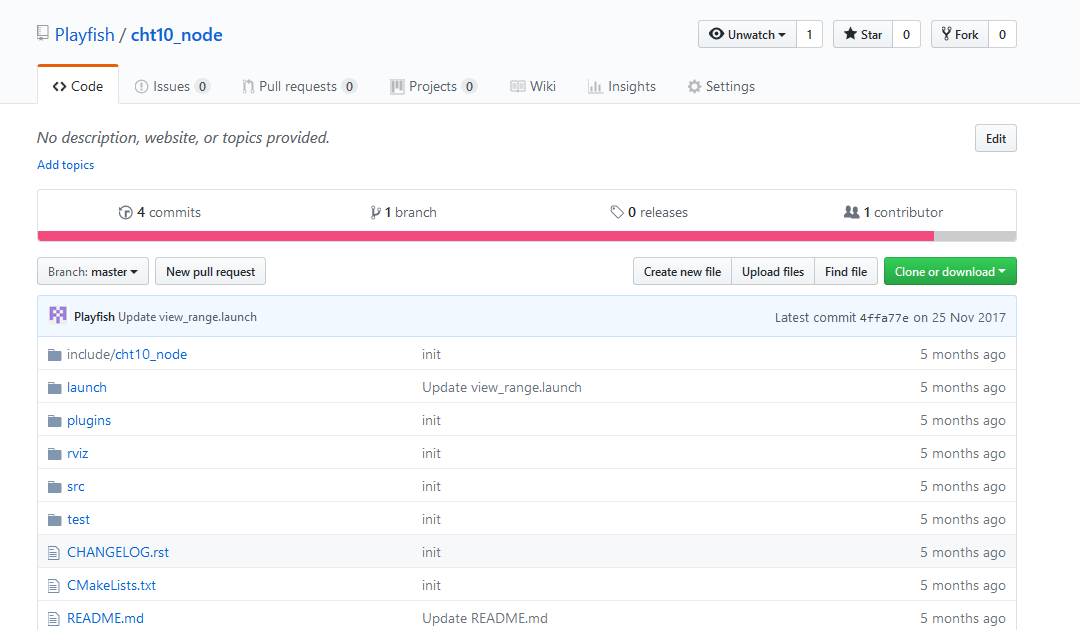
创建完成后,上传自己的代码到github的cht10_node存储库中。完成如上图。
注意:发布ROS包应有如下内容,否则无法发布:
- CHANGELOG.rst:必须有该文件,该文件内容,可以查看我写的,格式一般为包+版本(日期)+分隔符+修订日志
- package.xml:内容必须有maintainer子项,版本号必须与CHANGELOG中的版本一致,比如都为0.0.1,包名也一样。
- tag:版本标记。
生成tag用于以下发布ROS包追踪:
点击当前界面上的release按钮,创建一个release tag:
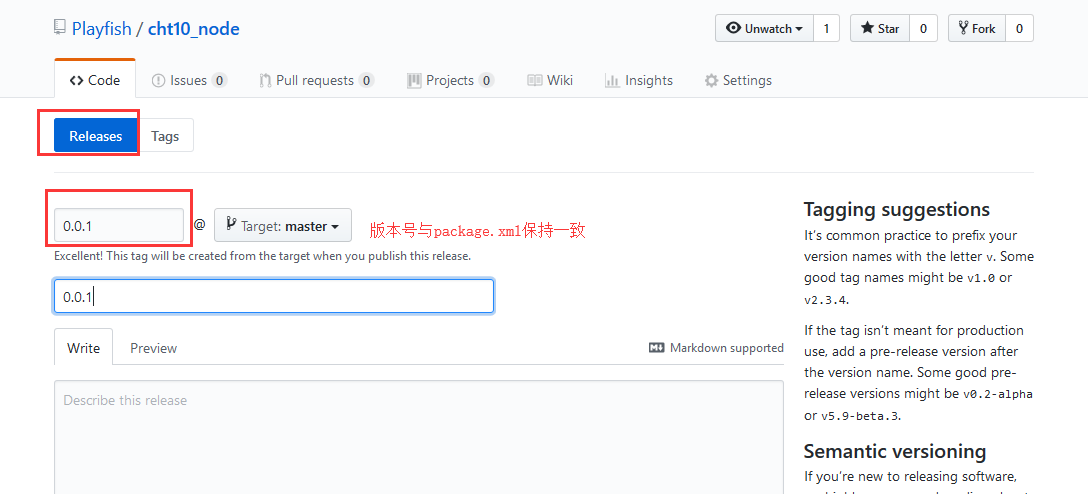
保存。
创建github release存储库
创建要发布的ROS完成后,为ROS包创建生成的release存储库,我创建的名为cht10_node_release,最好创建为包名_release。这个存储库为空即可,必须勾选初始化ReadeMe.md选项,生成的包版本更新日志将存放在这里。
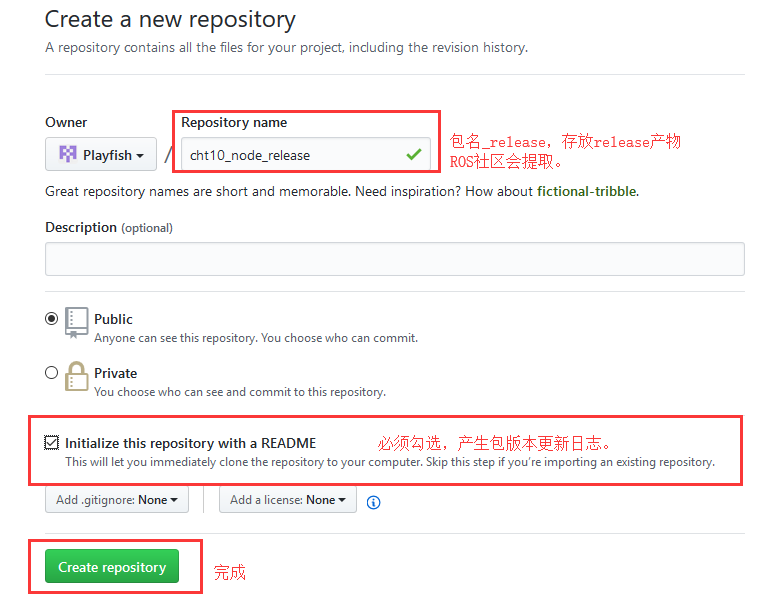
完成后即可,不用再管这个存储库,后期发布完成后,可以查看内容。
fork ROS社区版本包存储库
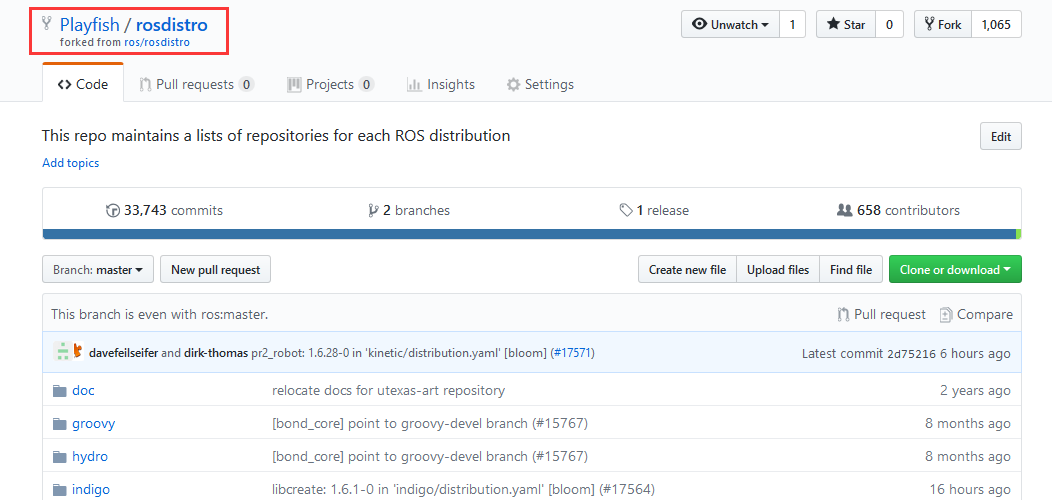
保证自己的github账号处于登录状态,点击:http://github.com/ros/rosdistro 。随后点击fork。
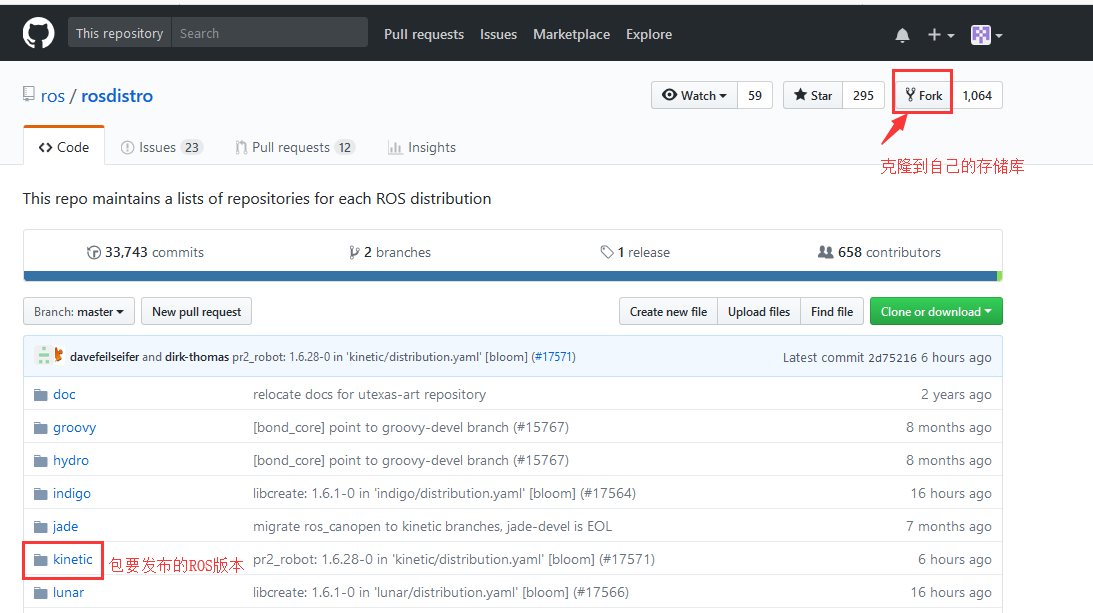
完成后,可以看到自己有了rosdistro存储库:
发布ROS包
发布前的准备完成后,在自己的Ubuntu下,安装bloom_release包,安装命令如下
sudo apt-get install python-bloom安装完成后,使用如下命令进行发布:
以下配置只会在第一次产生。
运行以下命令进行发布与配置ROS Release包,比如把cht10_node发布到kinetic版本上:
bloom-release --rosdistro kinetic --track kinetic cht10_node其中--rosdistro后的选项为发布到kinetic版本,--track选项为追踪选项,默认为ROS分布式版本,最后的cht10_node为当前存储库名称。
运行命令产生如下:
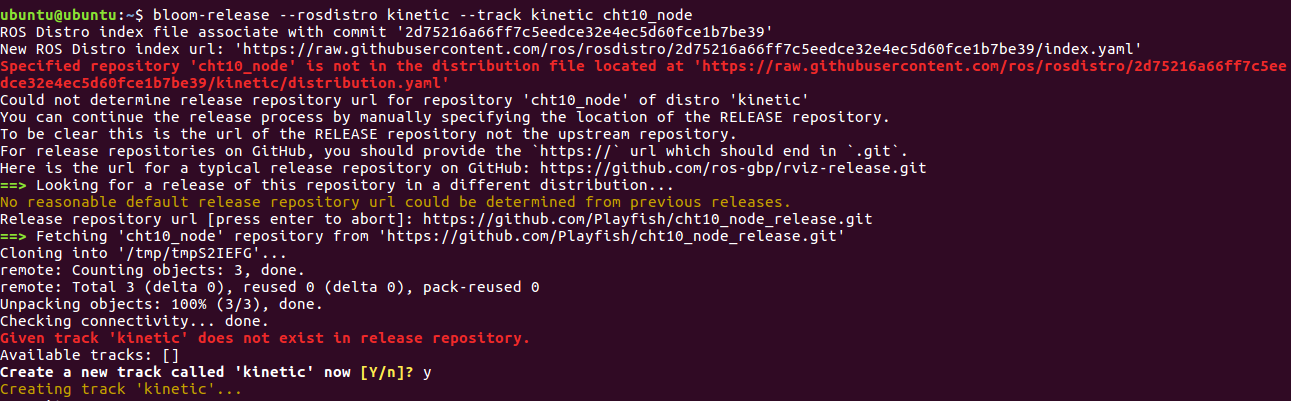
输入之前创建的发布的release存储库:https://github.com/Playfish/cht10_node_release.git
选择Y确定创建追踪。

输入当前存储库名称:cht10_node
输入当前存储库地址:https://github.com/Playfish/cht10_node.git
随后一路按下回车为默认选项。直到遇到输入用户名、密码为止,在此过程中会遇到很多次输入账号密码。

输入github账号密码,回车。

产生debian配置文件:y
输入当前github用户名密码继续。

产生debian包后,输入用户名密码发布tag。

编辑当前ROS包另一个配置,文档配置以及版本状态,输入默认即可。
注意:turn on pull request testing选择默认为N,如果选择y需要额外配置,不需要打开,我这里是为以后做准备。
额外的配置查看:https://github.com/ros/rosdistro/pull/17576

向rosdistro存储库的kinetic目录下的分布式文件添加当前包内容。
随后向rosdistro存储库提交请求,输入当前github账号密码。

生成请求日志。

完成后,将提示已经发布完成请求,大家可以点击最后的链接查看当前请求。
确认工作
请求完成后,大家打开之前创建的空白发布存储库,可以看到已经生成了很多生成deb包的规则文件,例如我的:
https://github.com/Playfish/cht10_node_release.git

大家可以到https://github.com/ros/rosdistro/pulls,查看发布情况。

如果一切正常,ROS维护人员将合并当前请求,合并完成后。
到 讨论论坛中https://discourse.ros.org/查看当前版本下的包迭代情况,一般为一个月ROS包版本迭代一次。
迭代完成后,可以看到自己的包已经存放到了http://packages.ros.org下。
使用apt-get update 更新后,可以下载自己的包了,比如我的包可以用如下命令下载:
sudo apt-get install ros-kinetic-cht10-node
ROS包的发布过程这一节告一段落,下一步讲述如何编辑cht10_node生成的wiki文档。
注意,如果要生成wiki文档,需要在package.xml里面添加url指向wiki。
这篇关于【ROS总结】发布ROS1包到ROS版本的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!







