rk3568专题

QT移植到RK3568开发板的方法步骤
《QT移植到RK3568开发板的方法步骤》本文主要介绍了QT移植到RK3568开发板的方法步骤,文中通过图文示例介绍的非常详细,对大家的学习或者工作具有一定的参考学习价值,需要的朋友们下面随着小编来一... 目录前言一、获取SDK1. 安装依赖2. 获取SDK资源包3. SDK工程目录介绍4. 获取补丁包二

RK3568平台(UART篇)uart_driver 注册流程
一.串口子系统框架 串口子系统框架是 Linux 内核中专门用于处理串口设备的模块化框架: 在上图中,包含了多个层级,每个层级负责处理不同的功能和任务,从而实现串口设备的 完整驱动和管理。接下来依次介绍每个层级的作用。 应用层:位于最顶层,是串口子系统中用户空间应用程序与内核空间之间的接口,应用层 包括了用户空间的串口应用程序,如串口通信工具 minicom 等。 字符设备层:位于应用

RK3568笔记五十八:基于SIP的视频通话测试
若该文为原创文章,转载请注明原文出处。 一、简介 记录SIP的视频通话测试过程,以前有做过GB28181了解过SIP协议,后面由于一些原因,没有在做了,在安防领域上,有很多终端设备使用SIP协议实现视频对讲等功能。 此篇记录交叉编译eXosip和osip,并编写检测的SIP客户端,通过microSIP软件模拟和板子交互过程。 demo有两个功能: 一是:microSIP呼叫设备,设备把语

基于RK3568平台移植ffmpeg3.4.5及ffmpeg验证
目录 一、概述二、环境要求2.1 硬件环境2.2 软件环境 三、移植流程3.1 编译x2643.2 编译mpp3.3 编译ffmpeg 四、ffmpeg验证4.1 ffmpeg配置说明4.2 ffmpeg推流/拉流使用说明4.2.1 使用http方式推流/拉流4.2.1.1 先执行ffmpeg服务4.2.1.2 再执行ffmpeg进行推流4.2.1.3 最后执行vlc进行拉流 4.2.2 使

RK3568 驱动RTC 使用
一、简介 RK3568开发板采用HYM8563作为RTC(Real Time Clock),HYM8563是一款低功耗CMOS实时时钟/日历芯片,它提供一个可编程的时钟输出,一个中断输出和一个掉电检测器,所有的地址和数据都通过I2C总线接口串行传递。最大总线速度为 400Kbits/s,每次读写数据后,内嵌的字地址寄存器会自动递增。 可计时基于 32.768kHz 晶体的秒,分,小时,星期,天
基于RK3568智慧交通-雷达视频融合一体机,支持鸿蒙
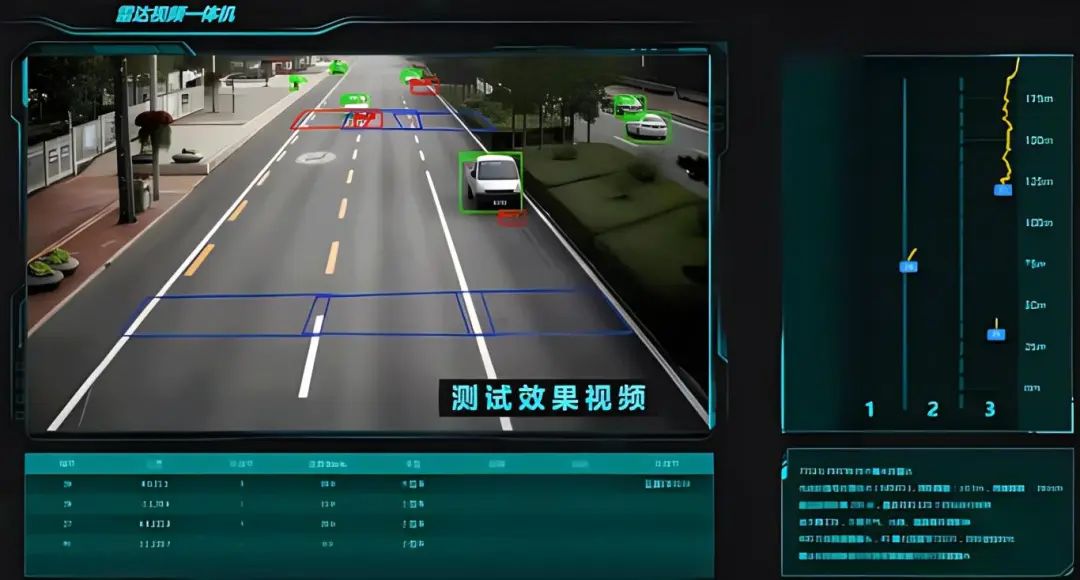
智慧交通-雷达视频融合一体机 随着5G网络与智慧交通车路协同系统在全国各点的落地,作为提升交通安全的前沿技术方案也愈发受到重视。 在交通信控领域,以往的感知技术、无论是地磁、线圈还是摄像头,功能都仅仅局限于数清经过了多少车辆,无法满足交通数字化管理对精细化、智能化管控的需求。 雷视融合一体机具备全天候和长距离的检测属性,除了统计车流量外,还可监测、跟踪车辆的运动行为特征,锁定车辆信息。同

RK3568 Android 11 蓝牙BluetoothA2dpSink 获取用于生成频谱的PCM
Android 中的 A2DP Sink A2DP Sink 在 Android 系统中主要用于 接收 其他蓝牙设备(如手机、平板、电脑等)发送过来的 高质量的立体声音频。简单来说,它让你的 Android 设备可以充当一个 蓝牙音箱 或 耳机 的角色。 核心功能: 接收音频流: 通过蓝牙协议接收来自其他设备的音频数据。解码音频: 将接收到的音频数据解码成可播放的音频格式。播放音频: 通

RK3568平台(平台总线篇)SPI驱动框架分析
一.SPI 子系统框架 可以将上面这一 SPI 子系统划分为三个层次,分别为用户空间、内核空间和硬件层,内核空间就包括 SPI 设备驱动层、SPI 核心层和 SPI 适配器驱动层,而本章的主要内容就是介绍 SPI 子系统框架中的内核空间。 SPI 适配器驱动层: SPI 适配器驱动层是 SPI 子系统的重要组成部分,负责实现具体的 SPI 硬件控制器的驱动 程序。SPI 适配器驱动程序的

rk3568 npu opencv 怎么联系起来
问题: 客户一直再问 关于 3568 npu opencv 的编译内容。 大致了解一些 ,这方面的内容。 网上的资料。 也许这个基本上就是他的逻辑了, 首先界面使用QT来写。 然后,使用 opencv 去读取摄像头。 然后拿到一帧图像之后,使用npu 去识别这个图像。 然后 使用opencv 去将图像显示在qt 上。 我不管 ffmpeg 这里其实涉及到了

RK3568笔记五十七:基于UNetMultiLane的多车道线等识别部署
若该文为原创文章,转载请注明原文出处。 此篇记录在正点原子的ATK-DLRK3568上复现山水无移大佬的UNetMultiLane 多车道线、车道线类型识别。 数据是基于开源数据集 VIL100。其中数据标注了所在的六个车道的车道线和车道线的类型。 8条车道线(六个车道),对应的顺序是:7,5,3,1,2,4,6,8。其中1,2对应的自车所在的车道,从左往右标记。 车道线的类别(10个
【迅为RK3568开发板】嵌入式学习之安卓JNI开发
P1 jni教程(一) 28:40 P2 jni教程(二) 34:47 P3 jni教程(三) 17:40 https://www.bilibili.com/video/BV18v411i7Dx/?share_source=copy_web&vd_source=a358e73102497025d6f44d05508acb8c 运行Android12和11版本、buildroot+QT5.15、

RK3568平台开发系列讲解(UART篇)line discipline
🚀返回专栏总目录 文章目录 一、UART 读写过程二、line discipline组成 沉淀、分享、成长,让自己和他人都能有所收获!😄 line discipline 介于 TTY 层和具体的串口驱动 ( 比如 serial8250 ) 之间。 一、UART 读写过程 发送数据时: 应用程序通过系统调用向 TTY 设备文件写入数据,进而调用 TTY 层
rk3568 Android 11在系统怎样执行命令获取SN号
目录 1. 使用ADB(Android Debug Bridge)2. 使用Shell脚本或应用程序3. 使用系统API4. 直接在设备上使用Shell5. getprop使用方法常见属性示例注意事项 在瑞芯微RK3568 Android 11系统中执行命令或获取SN号(序列号)通常可以通过几种不同的方法实现。 1. 使用ADB(Android Debug Bridge)

高效开发与调试 RK3568 上的 Android 11:全面指南
目录 介绍环境准备1. 硬件准备2. 软件准备 环境搭建1. 下载并编译 Android 11 源码2. 烧写 Android 11 到 RK3568 高效开发与调试1. 使用 ADB 进行调试USB 连接无线调试 2. 使用 Android Studio 进行开发与调试配置 Android Studio使用 Logcat 查看日志断点调试 3. 使用其他工具进行性能分析SystracePr

RK3568技术笔记十三 Ubuntu的编译
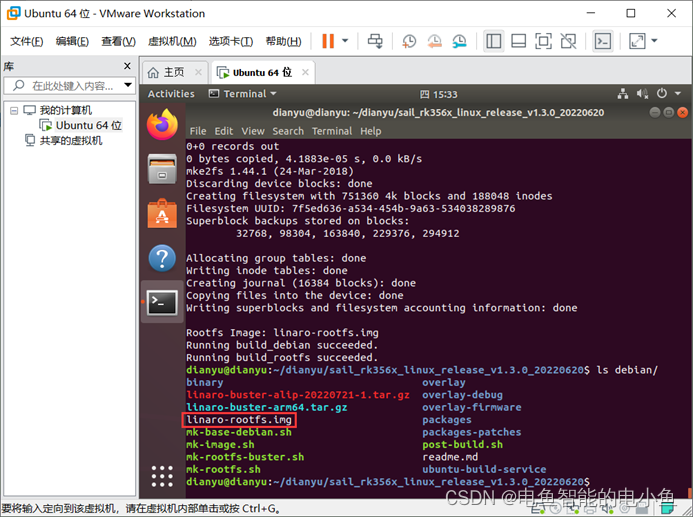
Ubuntu文件系统编译 在编译前需要按照前面的方法初始化编译环境,否则会导致编译失败(若配置过则无需重复配置)。 按下述方法编译的Ubuntu系统,用户名是:dianyu 密码:1 编译Ubuntu,执行命令: $ ./build.sh ubuntu 如下图所示: 编译完成后可以执行命令: $ ls ./rockdev/ -al 查看Ubun

迅为RK3568驱动教程第十八期-PWM
系统性PWM课程,完全掌握PWM。采用框架学习法,从基础知识、PWM子系统框架、API函数理论由面到点,逐个击破。通过SG90舵机,呼吸灯的控制把理论转为动手能力。最后从零实现输入捕获驱动程序,深入探究,体验一把原厂工程师的工作。 目录: 0.总领 1.什么是PWM? 2.iTOP-RK3568开发板PWM接口介绍 3.pwm子系统框架 4.实验外设:SG90舵机介绍 5.使用sysfs接口操作p
【OpenHarmony4.1 之 U-Boot 2024.07源码深度解析】007 - evb-rk3568_defconfig 配置编译全过程
【OpenHarmony4.1 之 U-Boot 2024.07源码深度解析】007 - evb-rk3568_defconfig 配置编译全过程 一、编译后目录列表二、make distclean三、生成.config文件:make V=1 ARCH=arm64 CROSS_COMPILE=aarch64-linux-gnu- evb-rk3568_defconfig四、开始编译:CROS
RK3568技术笔记九 编译Linux详细介绍
在编译前需要按照前面的方法始化编译环境,否则会导致编译失败(若配置过则无需重复配置)。 全自动编译包含所有镜像编译,包括:uboot编译、Kernel编译、Recovey编译、文件系统编译、编译完成镜像的更新与打包。 按照前面的方法初始化编译环境后,还需要设置RK_ROOTFS_SYSTEM环境变量,通过设置此变量,可以决定打包哪个文件系统: 打包buildroot文件

RK3568平台(音频篇)声音的数字化和数字音频接口
一.声音信号的数字化 我们应该都知道,声音是一种模拟信号,如果想用于计算机,就必须要将模拟信号转换为数字信号,这样,我们就能在计算机上存储声音了,等待用户想播放的时候,再将数字信号转换为模拟信号。声音的数字化需要经历三个阶段:采样、量化、编码。 采样: 是把时间上连续的模拟信号在时间轴上离散化的过程,这里有采样频率和采样周期的概念,采样周期即相邻两个采样点的时间间隔,采样频率是采样周期的倒数
查看 RK3568 Android SDK 版本的详细指南
目录 前提条件方法一:通过`getprop`命令查看系统属性方法二:通过`build.prop`文件查看版本信息方法三:查看源码中的配置文件方法四:通过编译输出查看版本信息附录:常见问题及解决方法1. `adb` 命令找不到设备2. `getprop` 或 `cat` 命令输出为空3. 在源码中找不到版本信息 前提条件 已安装并配置好RK3568 Android开发环境已连接

RK3568平台(input篇)输入设备应用编程
一.输入设备介绍 输入设备其实就是能够产生输入事件的设备就称为输入设备,常见的输入设备包括鼠标、键盘、触摸屏、按钮等等,它们都能够产生输入事件,产生输入数据给计算机系统。 对于输入设备的应用编程其主要是获取输入设备上报的数据、输入设备当前状态等,譬如获取触摸屏当前触摸点的X、Y 轴位置信息以及触摸屏当前处于按下还是松开状态。 input 子系统: 输入设备种类非常多,每种设备上报的数据类型又
编译rk3568 Android,rk3568_r-user和rk3568_r-userdebug的区别
在 Android 开发环境中,lunch 命令用于选择编译目标设备和构建类型。选择不同的构建类型(如 user 和 userdebug)会影响编译结果的特性和用途。以下是 rk3568_r-user 和 rk3568_r-userdebug 之间的主要区别: user 构建类型 (rk3568_r-user): 目标用户:最终用户(消费者)。特性: 优化:启用了更多优化,以提高性能和减少资源

RK3568平台(触摸篇)触摸屏基本原理
一.触摸屏概述 触摸屏作为一种新的输入设备,它是目前最简单、方便、自然的一种人机交互方式。 触摸屏又称为“触控屏”、“触控面板”,是一种可接收触头等输入讯号的感应式液晶显示装置;当接触了屏幕上的图形按钮时,屏幕上的触觉反馈系统可根据预先编程的程式驱动各种连结装置,可用以取代机械式的按钮面板,并借由液晶显示画面制造出生动的影音效果。 二.常见触摸屏分类 目前市面上主要有几种类型的触摸屏:电阻式

RK3568技术笔记六 新建 Ubuntu Linux 虚拟机
VMware 安装完成后,启动 VMware 软件。启动后在 VMware 主界面点击“创建新的虚拟机”。如下图所示: 开始对新建的虚拟机进行设置。选择“自定义”,然后点击“下一步”。如下图所示: 使用默认配置,单击“下一步”。如下图所示: 选择“稍后安装操作系统”,单击“下一步”,如下图所示: 选择“Linux”,然后选择“Ubuntu 6
RK3568技术笔记 Ubuntu 安装VMware Tools
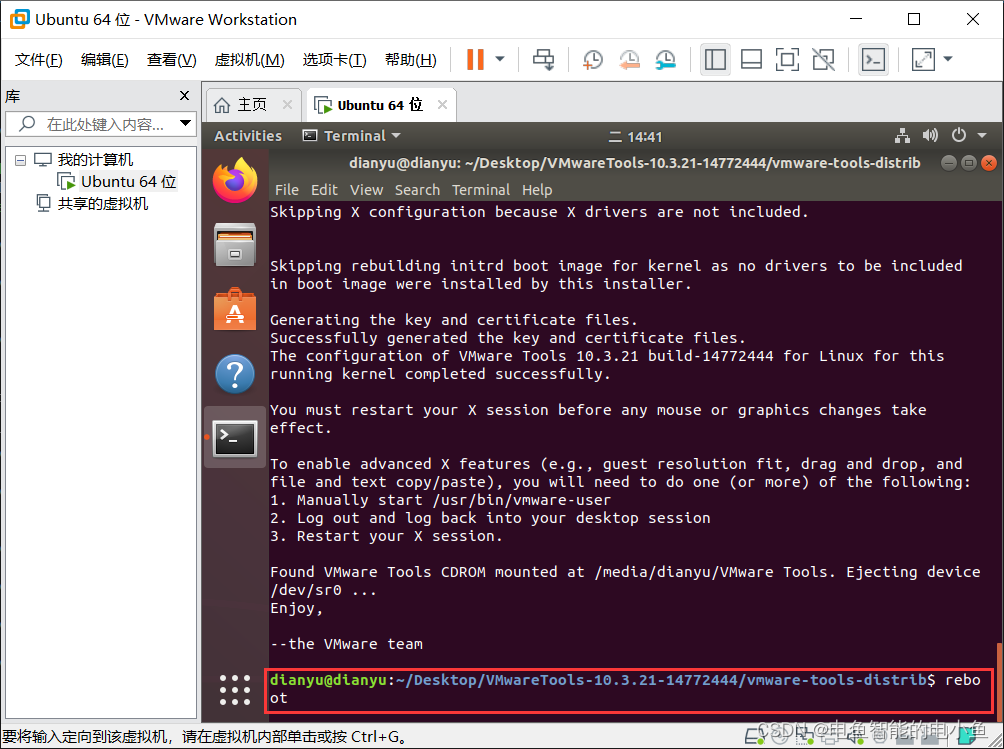
安装 VMware Tools 后可以直接使用复制粘贴功能拷贝 Ubuntu 系统和 windows 主机内的文件,非常方便。 开启虚拟机,必须要进入ubuntu系统后才能进行下面的步骤。 单击 VMware 软件中的标签“虚拟机”,在下拉的菜单中单击“安装VMware Tools (T)”。如图所示: 稍等一会,会弹出VMware Tools光盘,将

RK3568笔记三十二:PaddleSeg训练部署
一、环境 1、Autodl配置 PyTorch 1.7.0Python 3.8(ubuntu18.04)Cuda 11.0 2、所需环境需求 - OS: 64-bit- Python 3(3.6/3.7/3.8/3.9/3.10),64-bit version- pip/pip3(9.0.1+),64-bit version- CUDA >= 10.2- cuDNN >= 7.6