psins专题

PSINS工具箱函数介绍——pvtplot
关于工具箱 pvtplot是绘图函数,用于绘制位置、速度、时间信息 本文所述的代码需要基于PSINS工具箱,工具箱的讲解: PSINS初学指导:https://blog.csdn.net/callmeup/article/details/137087932 使用方法 使用例程: pvtplot(pvt, 't0h'); 例程实践 运行代码 运行程序“test_GPS_PVT.

【PSINS】SINS与航位推算的EKF例程讲解|三维轨迹
文章目录 SINS与航位推算例程构造滤波前滤波主体滤波后处理 运行结果源代码 SINS与航位推算 SINS是捷联惯导,略。 航位推算: 本文讲解的程序是PSINS工具箱(相关文章:PSINS初学指导,https://blog.csdn.net/callmeup/article/details/136459824)的一个函数,在此基础上进行优化。如果要运行,需要先安装工具箱

【PSINS工具箱】基于工具箱,自己设计的轨迹,并生成IMU数据和三维视图(完整代码)
完整代码 在有工具箱的情况下,直接运行代码,即可 % 基于PSINS工具箱的三维轨迹生成、三维图像绘制与IMU数据生成% date:2024-2-13% Evand(evandworld@qq.com)% Ver1clear;clc;close all;glvsts = 0.1; % sampling intervalavp0 = [[0;0;0]; [0;0;0];

PSINS工具箱自己优化的函数
工具箱本身没有xyz的距离差转纬经高的差值的函数,根据工具箱现有函数名命名规则,编写一个demo,可能不是很严谨,但目前来说够用了。 用法 dxyz为xyz三轴的位移,pos0为初始纬经高。输出与初始点相比,纬经高的差值 程序源码 function [dpos] = EV_dxyz2dpos(dxyz,pos0)% 笛卡尔系的xyz转化为纬经高% See also pos2dxy

PSINS工具箱使用笔记——引言
全局变量用glvs来设置,每个程序运行前均运行一次“glvs”,以设置全局变量(类似于头文件)。 glv:global various 作者给出四个常用的坐标系: 1. 惯性坐标系i(地球表面) 2. 地球坐标系e:地心地固坐标系ECEF 3. 导航坐标系n:东北天 4. 载体坐标系b:右-前-上 Cnb表示从n系到b系的旋转矩阵【注:这一段与前面自己设置的不同】。 IMU数据 姿态角: At
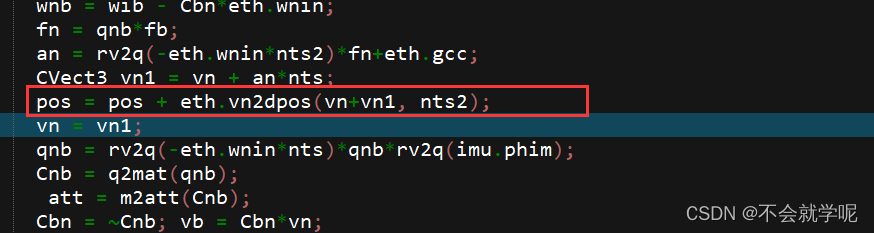
PSINS中的各类更新代码解析
1、姿态更新 更新原理 微分方程 因为离散化比较复杂,所以采用矩阵链转换 更新也就是找到前后时刻的关系。下面是推导逻辑, PSINS中的涉及到的代码 需要注意的是叫增量采用的增量时刻不同,n系下是用【T/2,T】的姿态表示【T,2T】的姿态变化;所以rv2q()中使用的是T/2时刻的角速率*T/2 代表【T/2,T】的角增量-eth.wnin*nts。 b下的角增量直接用的
严恭敏老师PSINS工具箱解读——trjfile
感谢严老师的无私奉献 trjfile——加载或保存轨迹数据 function trj = trjfile(fname, trj)——'加载或保存轨迹数据'% Save or load trajectory *.mat file.%% Prototype: trj = trjfile(fname, trj)% Inputs: fname - file name, with def
严恭敏老师PSINS工具箱解读——imuadderr
感谢严老师的无私奉献 imuadderr——imu数据添加误差 function imu = imuadderr(imu, imuerr, ts)% SIMU outputs adding errors simulation, denoted as:% imu = K*imu + drift error.%% Prototype: imu = imuadderr(imu,

严恭敏老师PSINS工具箱解读——imuerrset
感谢严老师的无私奉献 imuerrset——imu的误差设置 function imuerr = imuerrset(eb, db, web, wdb, sqrtR0G, TauG, sqrtR0A, TauA, dKGii, dKAii, dKGij, dKAij, KA2, rxyz, dtGA)% SIMU errors setting, including gyro & acc
严恭敏老师PSINS工具箱解读——avpset
avpset——对avp参数进行初始化设置 function avp = avpset(att, vn, pos) ——`对avp进行初始化设置;输入参数att、vn和pos应都为列向量或行向量,最好都为列向量`% avp=[attitude; velocity; position] setting.%% Prototype: avp = avpset(att, vn, po
严恭敏老师PSINS工具箱解读——glvf
glvf——对工具箱的全局变量进行初始化 function glv1 = glvf(Re, f, wie) ——`根据参考椭球的长半轴、扁率和自转角速率确定相应参考椭球的其它参数`% PSINS Toolbox global variable structure initialization. ——`对工具箱的全局变量进行初始化`%% Prototype: glv = glv