pixhawk专题

Pixhawk_Ardupilot_Makefile文件调用关系
www.ncnynl.com/archives/201607/307.html www.05935.com/bc/245795/ Ardupilot代码的编译文件都存放在Ardupilot/MK/目录下,所有类型的编译都是从Ardupilot/mk/apm.mk开始, apm.mk:首先获取编译系统类型,cygwin还是其它 ├─environ.mk ├─help.m

PIXHAWK添加自定义消息存储到SD卡
四旋翼调试阶段总会出现很多难以预见的现象,这时为了找到所出问题的原因,就需要获得原始相关数据进行分析,pixhawk代码提供了记录飞行日志的功能,能够将飞行中的重要数据存入SD卡中,并有相应的软件画出曲线分析数据。 目前pixhawk官方开发指导网站上介绍的是Logging功能的用法,没有提到sdlog2,而代码中默认启动的是sdlog2这个应用,所以添加新的日
AP_HAL 再分析, 以pixhawk-fmuv2为硬件平台,ChibiOS为底层操作系统:
AP_HAL.h 分析 #include <stdint.h>#include "AP_HAL_Namespace.h"#include "AP_HAL_Boards.h" --->>> 板子选择比如 HAL_BOARD_CHIBIOS#include "AP_HAL_Macros.h"#include "AP_HAL_Main.h"/**< hal 模块的类集合,所有的类都是纯虚

AP_HAL 分析, 以pixhawk-fmuv2为硬件平台,ChibiOS为底层操作系统:
1. class AP_HAL::AP_HAL,该接口类聚合了所有提供给应用层的硬件接口 class AP_HAL::HAL {public:HAL(AP_HAL::UARTDriver* _uartA, // consoleAP_HAL::UARTDriver* _uartB, // 1st GPSAP_HAL::UARTDriver* _uartC, // telem1AP_HAL::UA

APM、Pixhawk、Pixhack端口定义接线图
APM、Pixhawk、Pixhack端口定义接线图 APM端口定义接线图 Pixhawk端口定义接线图 Pixhawk指示灯颜色状态 Pixhack端口定义接线图 Pixhack端口电源模块OSD、GPS连接 Pixhack PWM转接小板 Pixhack 转接小板连接OSD及空速管 pixhack使用osd教程 pix飞控OSD数传有时连接不

基于Ardupilot/PX4固件,APM/PIXhawk硬件的VTOL垂直起降固定翼软硬件参数调试(第二篇)软硬件参数调试
基于Ardupilot/PX4固件,APM/PIXhawk硬件的VTOL垂直起降固定翼软硬件参数调试(第二篇)软硬件参数调试 本文内容大部分来自Kris,我们的K大,在VTOL领域的大牛,在此,非常感谢K大。能引用K大的成果也是自己的荣幸,不便之处还请K大多多包涵,在此引用只是为方便自己日常学习,部分参数表里根据自身情况,增加了修改环节和相应参数。 垂直起降固定翼 中文教程-参数设置 垂直起
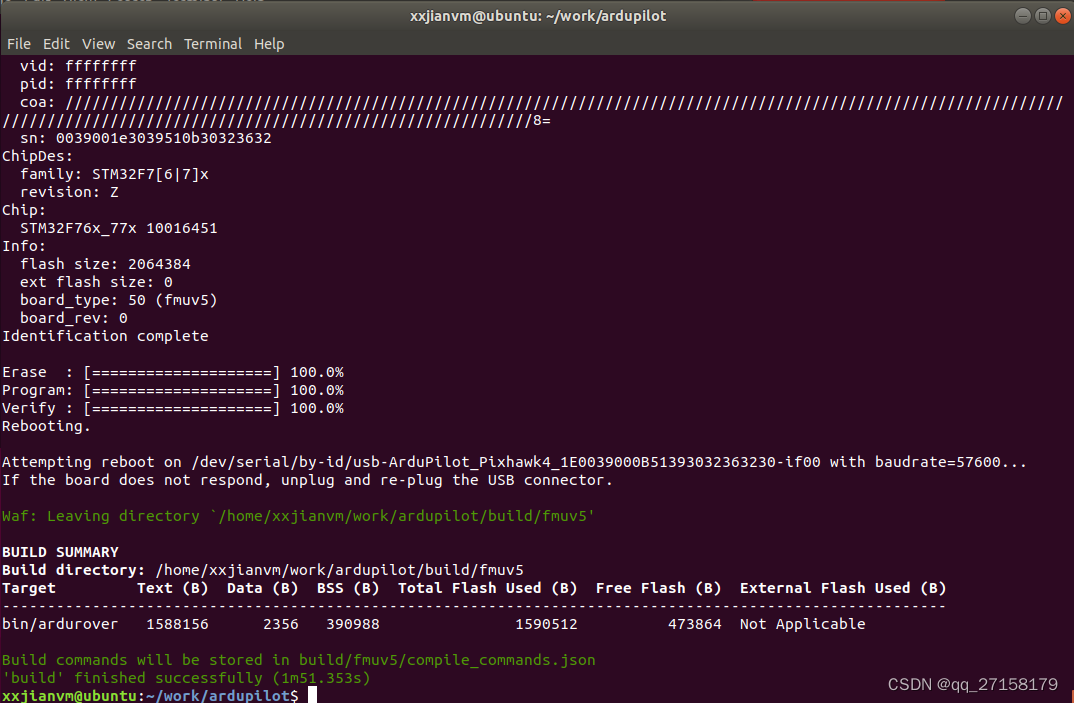
pixhawk控制板的ArduPilot固件编译
0. 环境 - ubuntu18(依赖python2和pip,建议直接ubuntu18不用最新的) - pixhawk 2.4.8 - pixhawk 4 1. 获取源码 # 安装git sudo apt install git # 获取源码 cd ~/workgit clone --recurse-submodules https://github.com/ArduPilot/ar

Ubuntu下,使用mavlink_shell.py连接pixhawk
按照上一个帖子安装编译环境后,博主想使用mavlink_shell.py连接pxihawk。 按照提示进行安装结果发现报错了,后寻得http://blog.csdn.net/yangang185/article/details/72726429 归根结底还是因为缺少相关的依赖库。详细说明见上面的网址。 这里只给出解决办法: 输入指令: sudo apt-get install li
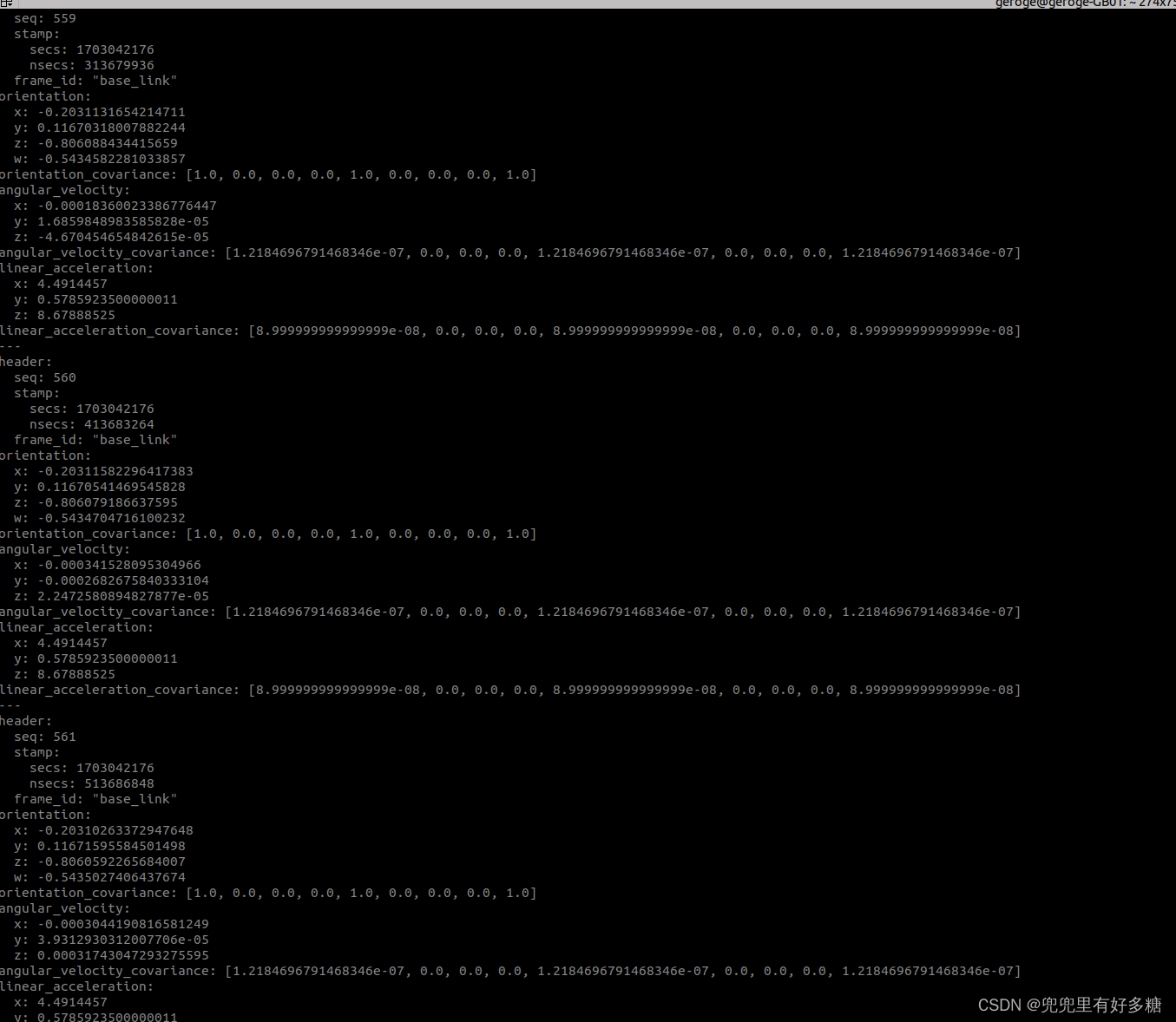
ubuntu設定QGC獲取pixhawk Mini4(PX4 Mini 4) 的imu信息
ubuntu20.04 QGC使用v4.3.0的版本 飛控pixhawk Mini4 飛控上只使用一條micro USB連接電腦,沒有其他線 安裝命令 sudo apt-get remove modemmanager -ysudo apt install gstreamer1.0-plugins-bad gstreamer1.0-libav gstreamer1.0-gl -ysu
【无人机】PIXHAWK、PX4、APM区别
PIXHAWK、PX4、APM APM固件专为Arduupilot开发的固件,现也用于PIXHAWK。有ArduCopter社区支撑、开放,功能全、迭代升级快,适合直接用。由于有较多的历史兼容性需求,软件代码体系相对杂乱,还封装了PX4的内核,学习起来困难些。 PX4固件专为PIXHAWK开发的固件。相对封闭,代码体系相对简单清晰,社区相对小,迭代慢一些,但因为相对清晰,适合学习研究。 P

基于Pixhawk和ROS搭建自主无人车(五):SLAM导航篇
参考 PX4 Autopilot User GuideArduPilot Documentation 基于Pixhawk和ROS搭建自主无人车(文章链接汇总) 1. 硬件平台 2. 环境搭建 2.1 创建工作空间 $ cd$ mkdir -p mav_ws/src$ cd mav_ws$ catkin_init_workspace ROS命令 catkin_init
pixhawk 2.4.6 pix2.4.8 原理图PCB二层板
pixhawk 2.4.6 pix2.4.8 原理图PCB二层板 https://item.taobao.com/item.htm?spm=2013.1.20141001.1.1f0a12c2LNhNYK&id=758099518663&scm=1007.12144.97955.42296_0_0&pvid=82be4d0c-30f3-45d5-9354-acf3369b62b4&utparam

【无人机学习篇】构建mavros机载电脑连接,从机载电脑获取pixhawk数据
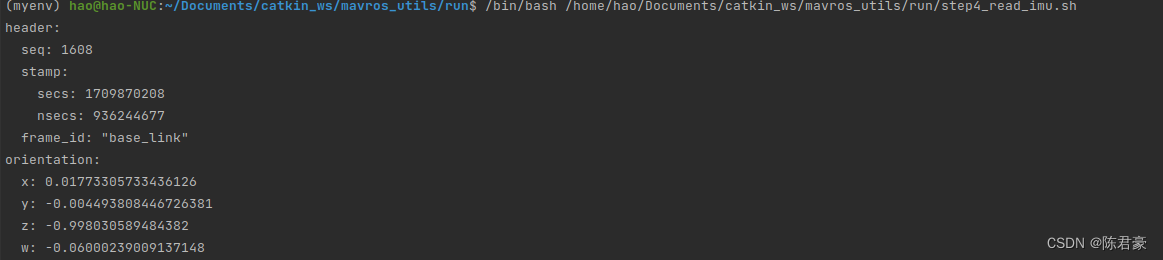
(本文基于的pixhawk版本:6X minibase V2.2 ,固件:apm) 整个的步骤(baseline): 具体的每一步都可以在网上查到教程,这里只是梳理出一个流程。并且ubantu与ros的版本也不是必须和我的一致,也可以是ubantu18.04与ros melodic 在机载电脑上安装ubantu20.04(ros必备运行环境) 安装ros noetic(mavros必备运行环
【无人机学习篇】构建mavros机载电脑连接,从机载电脑获取pixhawk数据
(本文基于的pixhawk版本:6X minibase V2.2 ,固件:apm) 整个的步骤(baseline): 具体的每一步都可以在网上查到教程,这里只是梳理出一个流程。并且ubantu与ros的版本也不是必须和我的一致,也可以是ubantu18.04与ros melodic 在机载电脑上安装ubantu20.04(ros必备运行环境) 安装ros noetic(mavros必备运行环
图文并茂详细教程之-- 用pixhawk飞控组装一台F450四轴无人机(下)
摘自:https://mp.weixin.qq.com/s/1vXfYPgaQEkXLfpSnjJqAw 图文并茂详细教程之-- 用pixhawk飞控组装一台F450四轴无人机(下) CJKK 苍穹四轴DIY 2019-11-15 第八步 失控保护设置 PIX 的失控保护是通过 故障保护 菜单配置的,点击 初始设置->必要硬件->故障保护,如下所示: 首先明确飞控有几

现在明白为什么pixhawk光流模块和超声波模块绑在一起
你之前买pIxhawk光流模块时就发现它居然自动带了超声波模块,今天看到下面这些才真正明白为什么! 正点原子的也是的,光流模块也包含了定高 匿名光流模块其实也是激光定高+光流,这个激光定高和tfmini感觉长得一模一样,当初最开始用匿名的时候不是很好奇那两个摄像头是什么么,现在清楚了吧。

pixhawk的日志分析似乎是用flightplot
https://blog.csdn.net/sinat_39342174/article/details/79982138 http://blog.sina.com.cn/s/blog_643af4310102wx3n.html 我准备把今天飞的Pixhawk的日志分析下,看看到底也没有接受到GPS信号。
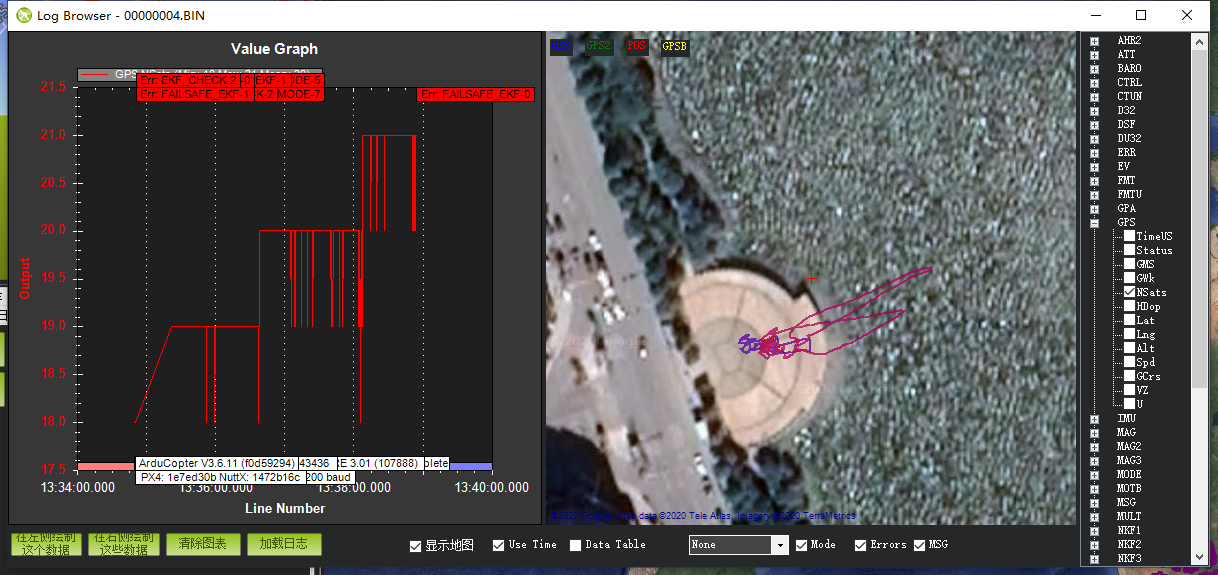
pixhawk 用MissionPlanner查看日志的一些总结(我个人的)
有时候点一个选项,没有线出来,多点几次就好了,有时候是这样子的。 那些地面站的报警其实日志里面有,你当时没连地面站也没事,事后看 prearm,地面站报警不都是这个么。 警报日志也会显示出来 PreArm不就是地面站显示的东西么,这里显示Mode not armable 所以不用地面站看警报也是可以的。 可以看地图,点击显示地图。可以看到GPS的轨迹
实际我看Pixhawk定高模式其实也是飞得很稳,飘得也不厉害
实际我看Pixhawk定高模式其实也是飞得很稳,飘得也不厉害,是的。 这两天实际都是定高模式在飞,因为切不到定点模式,有时候稳得怀疑是定点模式。当然有时候也略飘。 可以去空旷的地方暂时当穿越机玩玩。 。

图文并茂详细教程之---Pixhawk扩展思岚A1激光雷达实现360°避障
转载自:https://mp.weixin.qq.com/s/FCBbjAmmn-rMDskIen_i4Q 图文并茂详细教程之---Pixhawk扩展思岚A1激光雷达实现360°避障 原创 CJKK 苍穹四轴DIY 今天 本节教程主要介绍思岚A1激光雷达如何连接Pixhawk2.4.8飞控用于简单避障(遇到障碍自动停止前进)。 此方法雷达连接飞控串口,不需要建图,因此不需要使用机载电脑

自己组装Pixhawk F450无人机的一些细节
首先参考文档为: 1.https://mp.weixin.qq.com/s/VXKU_kIB-v-i0AX3zgtLig 2.https://mp.weixin.qq.com/s/Qzzl-dQ6Tz2pXNp7Oj0lTg 3. https://mp.weixin.qq.com/s/5Eezof-Xxt1DbYAsi5UTPw 4.https://mp.weixin.q

Benewake(北醒) TF02-i-CAN 雷达在Ardupilot (APM)上基于PixHawk的运用
目录 一、前言二、TF02-i-CAN 配置三、接线四、飞控参数设定4.1 避障的常用设置4.2 避障测试4.3 定高的常用设置4.4 定高测试 五、常见问题 一、前言 TF02-i CAN PixHawk1 CAN 端口或任何已刷新 Ardupilot 固件并具有 CAN 接口的飞控连接。 从 Copter 4.1.4 开始,Ardupilot 固件添加了对 CAN 协议的支持
Benewake(北醒) TFmini-i-CAN 雷达在Ardupilot (APM)上基于PixHawk的运用
目录 一、前言二、TFmini-i-CAN 配置三、接线四、飞控参数设定4.1 避障的常用设置4.2 避障测试4.3 定高的常用设置4.4 定高测试 五、常见问题 一、前言 TFmini-i CAN PixHawk1 CAN 端口或任何已刷新 Ardupilot 固件并具有 CAN 接口的飞控连接。 从 Copter 4.1.4 开始,Ardupilot 固件添加了对 CAN 协
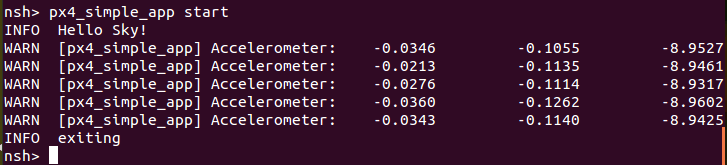
Pixhawk-PX4固件之hellosky
一 第一个应用程序 环境:ubuntu14.04LTS 来源:/Firmware/src/example/px4_simple_app 两个文件:CMakeLists.txt和px4_simple_app CMakeLists.txt: px4_simple_app.c:(后面涉及uorb机制暂时不懂) step 1:在nuttx下注册该应用 进入 Firmw

Pixhawk固件PX4之串口通讯
1、目的 为进一步扩展pixhawk的接口及功能,通过pixhawk现有接口(串口、I2C等)连接外部设备来实现,本节内容主要介绍串口通讯方式。 2、测试平台 硬件:pixhawk 2.4.8 px4固件版本:1.9.0 pixhawk串口采用SERIAL4: /dev/ttyS6,连接图如下: 3、功能实现 主要实现pixhawk从STM32串口端读取数据,并将数据发给PC,通