本文主要是介绍Pixhawk-PX4固件之hellosky,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
一 第一个应用程序
环境:ubuntu14.04LTS
来源:/Firmware/src/example/px4_simple_app
两个文件:CMakeLists.txt和px4_simple_app
CMakeLists.txt:
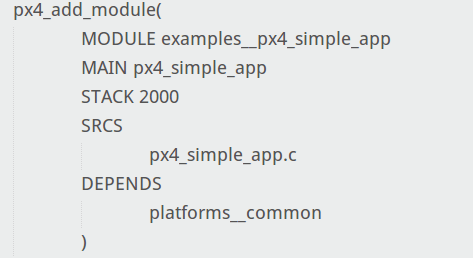
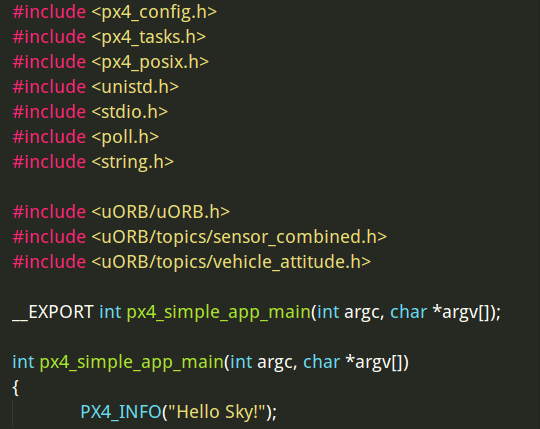
px4_simple_app.c:(后面涉及uorb机制暂时不懂)
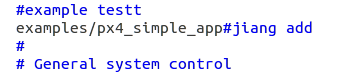
step 1:在nuttx下注册该应用
进入 Firmware/cmake/configs/nuttx_px4fmu-v2_default.cmake,打开这个文件。在里面加入examples/px4_simple_app。
step 2:编译px4固件,烧写进pixhawk
make px4fmu-v2_default
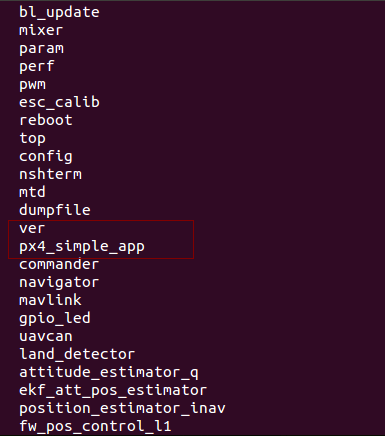
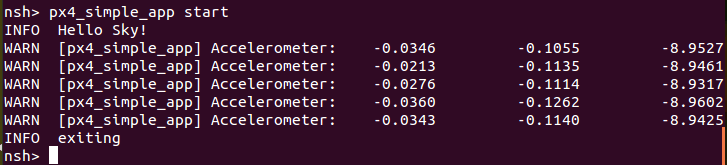
step 3:连接pixhawk,进入nsh,出现px4_simple_app应用
step 4:启动该应用:
总结:
nuttx下的应用程序主要包含三个部分:
1:CMakeLists.txt文件。CMake的实现都要将应用文件放在CMakeLists.txt下。
2:.c文件,应用主要实现的源文件
3:注册应用。将应用注册到nuttx系统中
可以依照该应用的模式自己写相关应用注册到nuttx系统中,后面涉及到消息的订阅等知识再慢慢积累
这篇关于Pixhawk-PX4固件之hellosky的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!



![[Doc][px4][ros2][gazebo][yolov8]PX4-ROS2-Gazebo-YOLOv8](https://i-blog.csdnimg.cn/direct/ab1456b7c811433f9d7af9ea130641a1.png)



