obb专题

yolov8-obb旋转目标检测onnxruntime和tensorrt推理
onnxruntime推理 导出onnx模型: from ultralytics import YOLOmodel = YOLO("yolov8n-obb.pt") model.export(format="onnx") onnx模型结构如下: python推理代码: import cv2import mathimport numpy as npimport onnxr


YoloV8实战:使用YoloV8实现OBB框检测
定向边框(OBB)数据集概述 使用定向边界框(OBB)训练精确的物体检测模型需要一个全面的数据集。本文解释了与Ultralytics YOLO 模型兼容的各种 OBB 数据集格式,深入介绍了这些格式的结构、应用和格式转换方法。数据集使用DOTA。 YOLO支持的 OBB 格式 在Ultralytics YOLO 模型中,OBB 由YOLO OBB 格式中的四个角点表示。这样可以更准确地检测到

YOLOv8改进 | 模块缝合 | C2f融合多尺度表征学习模块 【含OD、RTDETR、OBB等yaml文件】
秋招面试专栏推荐 :深度学习算法工程师面试问题总结【百面算法工程师】——点击即可跳转 💡💡💡本专栏所有程序均经过测试,可成功执行💡💡💡 专栏目录 :《YOLOv8改进有效涨点》专栏介绍 & 专栏目录 | 目前已有100+篇内容,内含各种Head检测头、损失函数Loss、Backbone、Neck、NMS等创新点改进——点击即可跳转 本文介绍的Multi-Scale是基


obb iou计算,旋转框iou,python和c++版本
python版本 import math#包围盒转化为角点def rbbox_to_corners(rbbox):# generate clockwise corners and rotate it clockwise# 顺时针方向返回角点位置cx, cy, x_d, y_d, angle = rbboxa_cos = math.cos(angle)a_sin = math.sin(angl
YOLO-obb旋转框目标检测比较好的学习博客
1.yolov8官网地址 GitHub - ultralytics/ultralytics: NEW - YOLOv8 🚀 in PyTorch > ONNX > OpenVINO > CoreML > TFLiteNEW - YOLOv8 🚀 in PyTorch > ONNX > OpenVINO > CoreML > TFLite - ultralytics/ultralyticsht
OBB碰撞及四叉树优化
项目最近在移植lua,考虑到后续会用到帧同步,就自告奋勇,尝试写一下碰撞系统,原来实现过AABB的碰撞,OBB碰撞就是在AABB的碰撞上加了个旋转,可理解为有向的AABB(AABB为轴对其,可理解为在同一坐标系中,各碰撞的正方向轴都一样),下图为AABB与OBB区别 刚开始做的时候把这个碰撞想的太简单,没有经过深思熟虑,直接就开始写,结果导致越写越乱,越写东西越多,写代码还是得先设计! AA
C# OpenVINO Yolov8-OBB 旋转目标检测
目录 效果 模型 项目 代码 下载 C# OpenVINO Yolov8-OBB 旋转目标检测 效果 模型 Model Properties ------------------------- date:2024-02-26T08:38:44.171849 description:Ultralytics YOLOv8s-obb model trained on runs
C# Onnx yolov8-obb 旋转目标检测
目录 效果 模型信息 项目 代码 下载 C# Onnx Yolov8-OBB 旋转目标检测 效果 模型信息 Model Properties ------------------------- date:2024-02-26T08:38:44.171849 description:Ultralytics YOLOv8s-obb model trained on runs/
C# OpenCvSharp DNN Yolov8-OBB 旋转目标检测
目录 效果 模型信息 项目 代码 下载 C# OpenCvSharp DNN Yolov8-OBB 旋转目标检测 效果 模型信息 Model Properties ------------------------- date:2024-02-26T08:38:44.171849 description:Ultralytics YOLOv8s-obb model train

百度Apollo规划算法——OBB障碍物检测代码解析
百度Apollo规划算法——Box障碍物检测代码解析 前言代码代码分析f1f2f3f4f5f6 参考 前言 本文主要分析Apollo代码中函数bool Box::HasOverlap(const Box2d &box) const {}的数学原理。 在阅读此部分代码时,第一遍没看懂return的一堆什么意思,百度之后说是采用OBB原理,所以就去了解下OBB原理,回来看还是
记录yolov8_obb训练自己的数据集
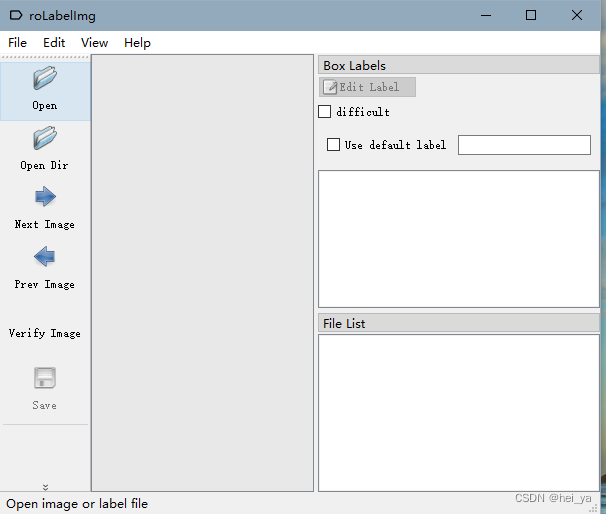
一.数据集制作 1.标注软件:roLabelImg roLabelImg是基于labelImg改进的,是用来标注为VOC格式的数据,但是在labelImg的基础上增加了能够使标注的框进行旋转的功能。 2.数据格式转换 2.1 xml转txt # 文件名称 :roxml_to_dota.py# 功能描述 :把rolabelimg标注的xml文件转换成dota能识别的xml

【实战OBB】自定义旋转对象检测
学习《OpenCV应用开发:入门、进阶与工程化实践》一书 做真正的OpenCV开发者,从入门到入职,一步到位! 数据集制作 我用手机拍了一张图像 然后自己写个代码,每旋转一度保存一张图像,这样就成功生成了360张图像及其注释文件,分为训练集与验证集。训练文件夹包含 320张带有注释的图像。测试和验证文件夹都包含 40 张带有注释的图像。数据集部分图像显示如下: 模型训练 准备好数据集
旋转框(obb)目标检测计算iou的方法
首先先定义一组多边形,这里的数据来自前后帧的检测结果 pre = [[[860.0, 374.0], [823.38, 435.23], [716.38, 371.23], [753.0, 310.0]],[[829.0, 465.0], [826.22, 544.01], [684.0, 539.0], [686.78, 459.99]],[[885.72, 574.95], [891.0,
OBB文件和StorageManager类使用介绍
http://www.android123.com.cn/androidkaifa/724.html 从Android 2.3开始新增了一个OBB文件系统和StorageManager类用来管理外部存储上的数据安全。如果你过去开发过Symbian S60第三版或以上的版本可能发现都有一个隔离的文件系统,仅根据自己应用的UID才能读取,当然这样的设计在iOS和WP7均实现了,And

睿智的目标检测——YOLOv7-OBB中的环境配置
学习前言 在文章「Pytorch搭建YoloV7-OBB旋转目标检测平台」中需要安装旋转目标检测非极大抑制库;后台私信经常有人遇到安装过程的问题,本文将详细介绍安装的过程。 源码下载 https://github.com/Egrt/yolov7-obb 喜欢的可以点个star噢。 Visual Studio安装 进入以下链接Visual Studio旧版本下载地址安装Visual Stu
yolov5 obb旋转框 tensorrt部署
文章目录 1.生成engine文件2.检测图像3.代码 yolov5-obb tensorRT部署代码结合王新宇和fish-kong两者的代码,可以多batch批量检测旋转框 yolov5旋转框检测: https://blog.csdn.net/qq_42754919/article/details/134145174 1.生成engine文件 首先需要将pt文件转换
Yolov8_obb(prob loss) 基于anchor_free的旋转框目标检测,剪枝,跟踪(ByteTracker)
Yolov8_obb(prob loss) 基于anchor_free的旋转框目标检测,剪枝,跟踪(ByteTracker) 效果好于yolov5,并能在小数据集上大幅度超越v5的结果,不过针对不同的数据集需要进行一些调参. 啊b上测试视频路径,不过效果一般,随便测了下,仅供参考。 https://www.bilibili.com/video/BV1wP411Y7RK/?spm_id_from=
【记录】使用yolov5_obb训练自己的数据集
引言 对于寻常的yolov5目标检测任务,只能检测水平或者垂直的检测框,而对于旋转框的检测却无能为力。为此,在这记录下使用yolov5_obb来训练自己数据集。 一、准备数据集 1、我们先看所需要的数据集文件什么样子,如下图文件夹Symbol所示: images文件夹下是格式为PNG的训练图片,labelTxt下则是对应的txt文件。也就是说我们只需要获取txt文件就行。 2、标注

一种快速收敛的自适应算法求解最小包围盒(OBB)
一种快速收敛的自适应算法求解最小包围盒(OBB) 最小包围盒沿坐标轴向包围盒AABB(Axis-Aligned Bounding Boxes)算法简单,适用场合有限。沿任意方向的包围盒OBB(Oriented Bounding Boxes)适用面广,但大多算法效率不高,一方面是模型本身复杂导致,另一方面是精度越高、循环叠代次数沿指数增加而导致。博主几年前提出的一种求解OBB问题的自适应算法,并用U

点云库PCL学习:提取最小包围盒(AABB、OBB)
提取最小包围盒(AABB、OBB) 最小包围盒介绍AABB、OBB包围盒的提取提取结果 最小包围盒介绍 包围盒也叫外接最小矩形,是一种求解离散点集最优包围空间的算法,基本思想是用体积稍大且特性简单的几何体(称为包围盒)来近似地代替复杂的几何对象。 常见的包围盒算法有AABB包围盒、包围球、方向包围盒OBB以及固定方向凸包FDH。碰撞检测问题在虚拟现实、计算机辅助设计与制造、游

Anaconda莫名其妙出现:Unable to create process using ‘C:\Users\<UserName>\.conda\envs\YOLOV5_obb\python.exe
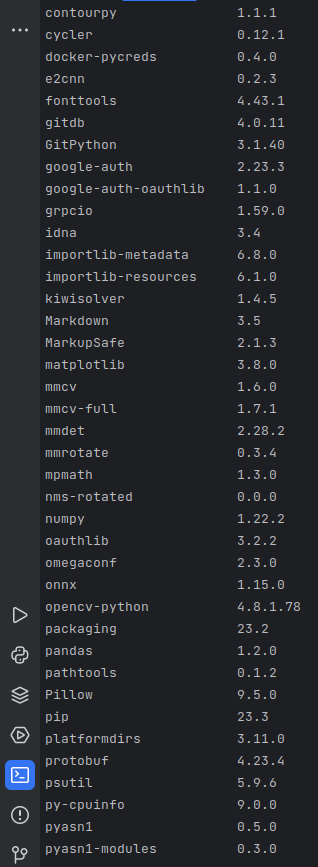
今天在anaconda装了一个新环境后电脑莫名其妙的出现了报错 Unable to create process using ‘C:\Users\MasterLee.conda\envs\YOLOV5_obb\python.exe “C:\Users\Master Lee.conda\envs\YOLOV5_obb\Scripts\pip-script.py” install numpy’