mmdetection3d专题

【3D目标检测】MMdetection3d——nuScenes数据集训练BEVFusion
引言 MMdetection3d:【3D目标检测】环境搭建(OpenPCDet、MMdetection3d) MMdetection3d源码地址:https://github.com/open-mmlab/mmdetection3d/tree/main?tab=readme-ov-file IS-Fusion源码地址:https://github.com/yinjunbo/IS-Fusion

【技术】MMDetection3D库的安装步骤记录
前言 最近折腾使用了MMDetection3D库,把安装的过程和环境配置都详细记录了下来,以方便人们避坑。blog 因为一不留神某个软件或驱动版本之间不匹配就会出现一些奇怪问题。 准备 本安装在以下环境中进行了测试:Ubuntu 20.04、CUDA-11.6、PyTorch v1.13.1。 Miniconda 此安装在conda虚拟环境中进行,因此请确保已安装Miniconda。

【MMDetection3D实战(2)】: 利用MMDet3D预训练模型进行推理
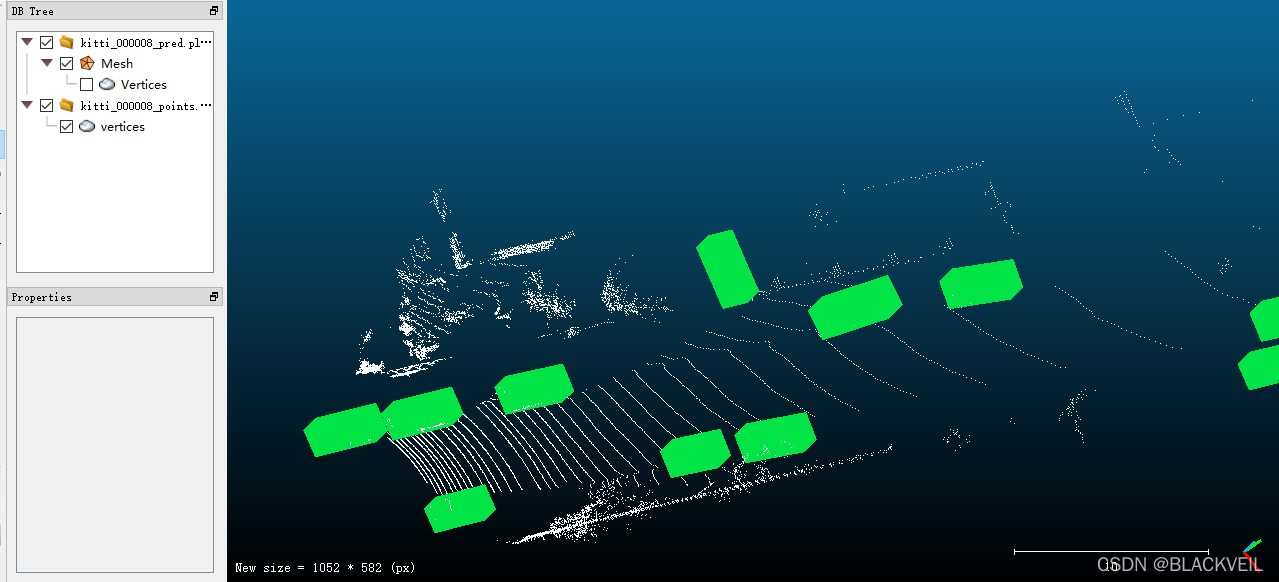
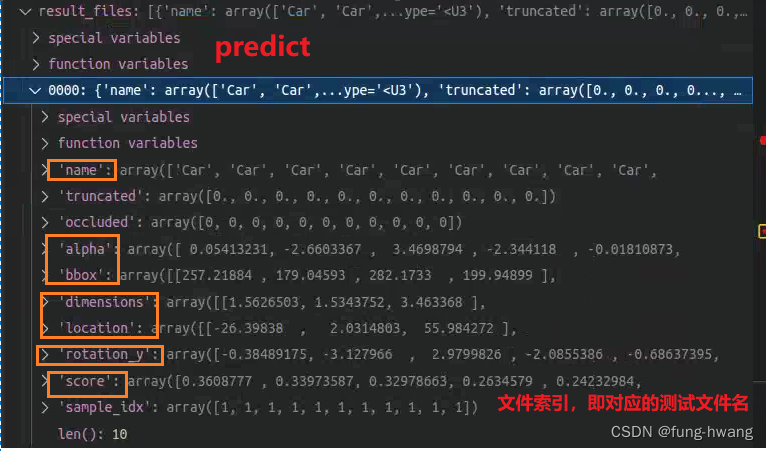
安装完成MMDet3D环境后,我们就可以基于MMDet3D提供的预训练模型在点云和单目图像上进行推理。 下图是利用是基于预训练模型的推理结果,可以看到无论是基于点云还是图像,它都能给出一个正确的推理结果,把对应的car和motor的3D box正确的框出来。 推理的实现很简单,大体分一下三步: (1): 下载预训练权重 :mmdection3d 的github中下载或使用mim工具下载(2)
MMDetection3D系列问题解决方法
文章目录 前言一、mmcv中出现TypeError: FormatCode() got an unexpected keyword argument ‘verify‘二、AttributeError: module 'setuptools._distutils' has no attribute 'version' 前言 本文档记录了我在学习MMDetection3D过程中遇

MMDetection3D v1.1.0安装教程
MMDetection3D v1.1.0安装 1. 系统环境2. 安装2.1 基本环境安装2.2 验证2.3 安装MinkowskiEngine和TorchSparse 3. 最终环境配置 根据 v1.1.0版本官方手册,测试后的安装配置,亲测可行 1. 系统环境 项目版本日期Ubuntu18.04.06 LTS-显卡RTX 2070-显卡驱动525.105.17- 2.
(一)MMDetection3D环境配置
(一)MMDetection3D环境配置 官方文档:MMDetection3D官方文档 推荐教程:通用视觉框架 OpenMMLab 系列课程之 MMDetection3D 项目地址:https://github.com/open-mmlab/mmdetection3d 第一步:Pytorch环境搭建 1.1 安装pytorch环境 conda create -n pytorch-mmdet

MMdetection3d框架的环境搭建与使用(二)-- 使用篇
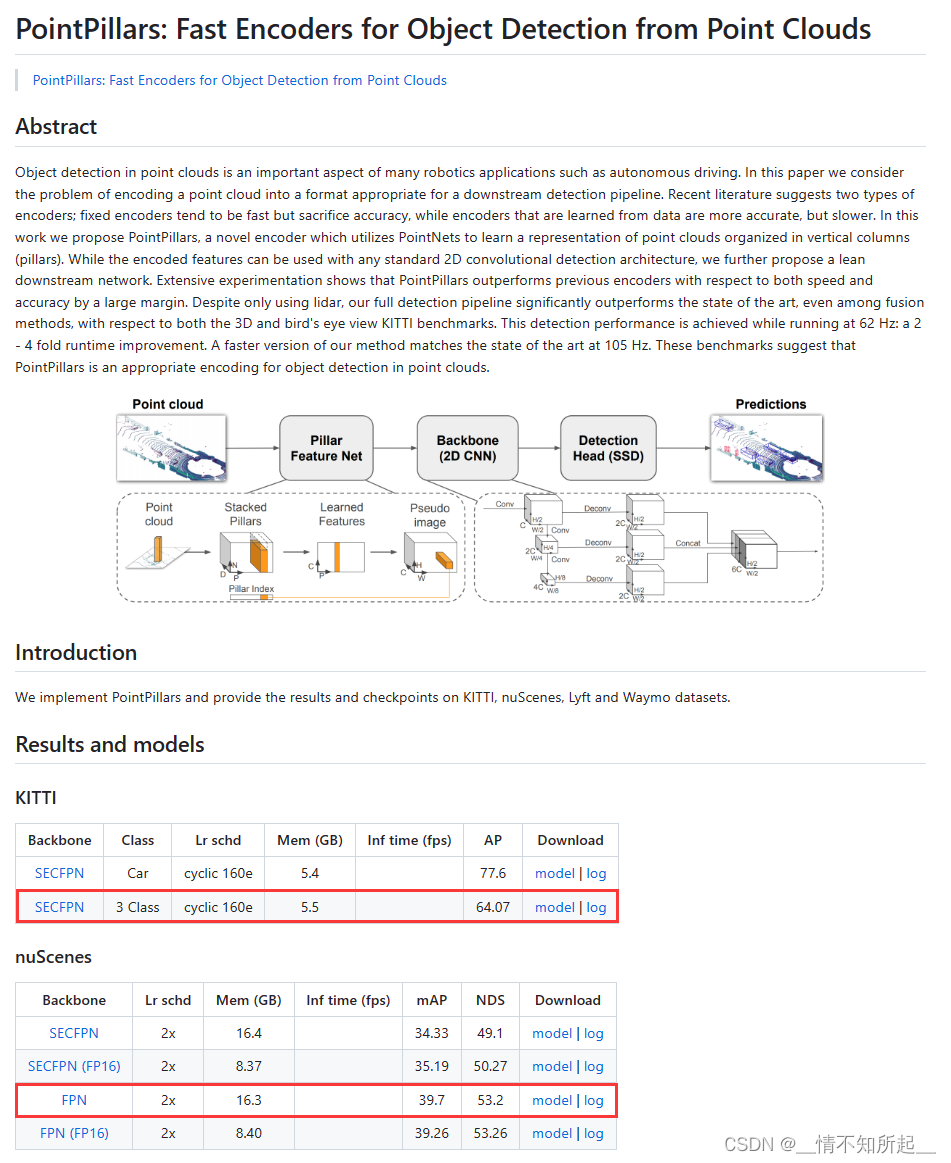
以kitti数据集、pointpillars模型为例介绍使用方法。 一、使用方法 1.数据集制作 其中,ImageSets自己创建,并把对应的txt文件复制进去, 2.预处理数据集 python tools/create_data.py kitti --root-path ./data/kitti --out-dir ./data/kitti --extra-tag kitti 3
MMdetection3d框架的环境搭建与使用(一)--环境搭建
1.框架简介 伴随着自动驾驶科技的飞速发展和激光雷达的普及,3D目标检测近年来逐渐成为业界和学术界的研究热点。然而,目前在3D目标检测领域却不像2D目标检测那样,有着像MMDetection这样简单通用的代码库和benchmark。所以,商汤发布了MMDetection3D(简称MMDet3D)来弥补这一空白。 2.框架优势 1).支持多模态/单模态3D检测 2).支持室内/室外主流数据

熟悉mmdetection3d数据在模型中的处理流程
目录 1、搭建模型2、读取数据3、运行流程3.1 图像特征获取3.2 点云特征获取3.3 head3.4 编码bbox 4、可视化5、总结 本图文数据集采取KITTI数据集配置文件的介绍可以参考博主上一篇图文本图文旨在利用一条数据,走完整个多模态数据处理分支,获得bbox,并可视化在图像上 1、搭建模型 本次教程选用的模型为MVXNet,是一个多模态融合的3D目标检测
Docker-mmdetection3d
Docker-mmdetection3d ubuntu18.04 3090Ti 文章目录 Docker-mmdetection3ddocker安装部署cuda报错安装mmdetection3d测试使用现成的镜像 docker安装 https://blog.csdn.net/b1134977524/article/details/120442417 常用命令: https:/
open-mmlab之mmdetection3d
一、环境安装 使用dockerfile文件构建docker镜像mmdet3d。 1、原dockerfile安装 docker build -t mmdet3d -f docker/Dockerfile . 注: 编译过程中若执行 RUN apt-key adv --fetch-keys https://developer.download.nvidia.com/compute/cud
CBGS(类别平衡分组采样)技术与mmdetection3d中的实现
1. CBGS(类别平衡分组采样) CBGS是针对自动驾驶场景中类别分布不平衡的问题而提出的,被广泛用于3D目标检测中。CBGS将训练集中包含每个类别的帧进行分组,并从各组种随机选择相同数量的帧构建新的数据集,以保证在训练时,每个类别的数据被选择的机会相同。 2. mmdetection3d中CBGS数据集的构建算法 设数据集共 N N N帧数据,共考虑数据集中的 C C C类物