本文主要是介绍MMdetection3d框架的环境搭建与使用(二)-- 使用篇,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
以kitti数据集、pointpillars模型为例介绍使用方法。
一、使用方法
1.数据集制作
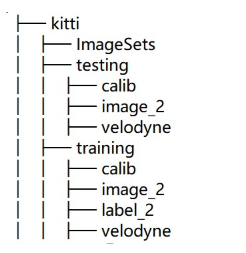
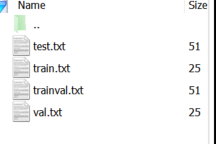
其中,ImageSets自己创建,并把对应的txt文件复制进去,
2.预处理数据集
python tools/create_data.py kitti --root-path ./data/kitti --out-dir ./data/kitti --extra-tag kitti
3.训练
python tools/train.py configs/pointpillars/hv_pointpillars_secfpn_6x8_160e_kitti-3d-3class.py
在训练时有很多参数可以直接输入,例如:
python tools/train.py configs/pointpillars/hv_pointpillars_secfpn_6x8_160e_kitti-3d-3class.py '--work-dir=/data/mmdet3d/mmdetection3d-master/work_dirs/1106-4cla-removedground/'
来指定模型保存路径。
4.测试
python tools/test.py configs/pointpillars/hv_pointpillars_secfpn_6x8_160e_kitti-3d-3class.py checkpoints/epoch_80.pth --eval mAP --options 'show=True' 'out_dir=./data/pointpillars/show_results'
5.其他功能
1)绘制训练时的分类损失和回归损失,并将其保存为pdf
先安装seaborn
pip install seaborn
再绘制损失图像
python tools/analyze_logs.py plot_curve path/to/log.json --keys loss_cls loss_bbox --out losses.pdf
2)计算平均速度
python tools/analyze_logs.py cal_train_time log.json [--include-outliers]
二、测试结果
1.pointpillars
Car:


3class:


2.SECOND

三、与作者的问答


这篇关于MMdetection3d框架的环境搭建与使用(二)-- 使用篇的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!






