laser专题
![[LightOJ 1292] Laser Shot (几何,判断共线)](/front/images/it_default.jpg)
[LightOJ 1292] Laser Shot (几何,判断共线)
LightOJ - 1292 刚开始写的时候是O( n3log(n) n^3log(n))的,枚举两个点,得到一条直线,用set记录下来,然后再 O( n n)地计数,居然没有卡过 orz 听了学长的教导,get到一个几何常用思路,正确解法如下 枚举一个点,再枚举其他点,计算到这个点的斜率,make_pair(dx,dy)塞到map里,把相同斜率的计数一下 这样时间复杂度为 O(n2log

外汇天眼:野村证券和Laser Digital与GMO互联网集团合作发行日元和美元稳定币
野村控股和Laser Digital将与GMO互联网集团合作,在日本探索发行日元和美元稳定币。GMO互联网集团的美国子公司GMO-Z.com Trust Company, Inc. 在纽约州金融服务部的监管框架下,在以太坊、恒星币和Solana等主要区块链上发行稳定币。GMO-Z.com Trust Company 运营着一个支持数字货币安全管理的强大系统;该系统支持多个技术平台,并包括监控货币交
Point cloud转 Laser sacn
文章目录 概要安装pointcloud_to_laserscan修改配置运行结果 概要 在ROS中将点云(PointCloud)转换为激光扫描(LaserScan)是一个常见的任务,尤其是在某些机器人系统中,激光雷达数据被用于导航和避障,但传感器输出的是点云数据。这种转换可以通过 pointcloud_to_laserscan 包实现,该包提供了一个节点,可以将接收到的Point

激光笔(Laser pointer)
激光笔 激光笔(Laser pointer),又稱激光指示器,是将半導體激光模組(二極體)設計、加工制成的便攜、手易持握的发射可見激光的筆型發射器。常見的激光指示器有紅光(650-660nm, 635-640nm)、綠光(520-525nm, 532nm)、藍光(445-450nm, 465nm)、堇紫光(405nm)等,功率通常以毫瓦为单位。通常被匯報、教學或導賞人員用它來投映一個光點或光柱指
增加Hokuyo Laser到你的turtlebot注意事项
可以参考:http://wiki.ros.org/turtlebot/Tutorials/hydro/Adding%20a%20Hokuyo%20laser%20to%20your%20Turtlebot 但文中有几处出错的地方 1.加载驱动时,赋予777权限,但举例中是666权限 2.文章挂在ros的hydro版本下面,举例确实indigo版本 3.~/.bashrc中的修改举例的路径

Easy-laser对中仪维修激光对中仪E540故障概述
维修常见故障:触摸屏损坏(屏碎,不显示,黑屏,蓝屏,无背光等),对中仪电路板损坏,对中仪接收器电路板维修,对中仪发射控制器电路板维修等均可维修,我司维修激光对中仪近20年,技术有保障,放心。 激光对中仪特点: 激光对中显示:实时显示联轴器和地脚读数,使用对中修正快速而方便 执行热膨胀值预置程序:工作温度高的设备,冷却对中时不考虑热膨胀因素,运行时会产生新的不对中。在冷态,将热膨胀补偿值(角度
Leetcode 2125. Number of Laser Beams in a Bank [Python]
计算每行的1的数量,每两层之间的连线数量就是两层1的数量的乘积。 class Solution:def numberOfBeams(self, b: List[str]) -> int:line = []for row in b:acc = 0for j in row:if j == '1':acc += 1if acc == 0:continueline.append(acc)#print(l

几个与BERT相关的预训练模型分享-ERNIE,XLM,LASER,MASS,UNILM
基于Transformer的预训练模型汇总 1. ERNIE: Enhanced Language Representation with Informative Entities(THU) 特点:学习到了语料库之间得到语义联系,融合知识图谱到BERT中,本文解决了两个问题,structured knowledge encoding 和 Heterogeneous Information Fu
PCL中的CAMERA_FRAME和LASER_FRAME
CAMERA_FRAME:系统的X轴是向右的,Y轴是向下的,Z轴是向前的。 LASER_FRAME:系统的X轴是向前的,Y轴是向左的,Z是向上的。

cartographer跑自己的数据包-2d建图篇(laser+Imu建图篇)
(猫崽子生病了,这一段时间忙着给它看病,花了好多钞票了!哎!) 相信大家装cartographer都可以跑通官网上的示例教程,所以,博主就在这里写一些跑自己数据包的经验,一呢,作为记录,预防自己老年健忘,二呢,跟大家分享一下经验。 如标题所示,博主用的是激光雷达数据和IMU数据进行建图。 硬件:北科天绘16线机械激光雷达,水平视角360度,10hz/s.惯导:诺瓦泰惯导系统,这个应该是全世界最好
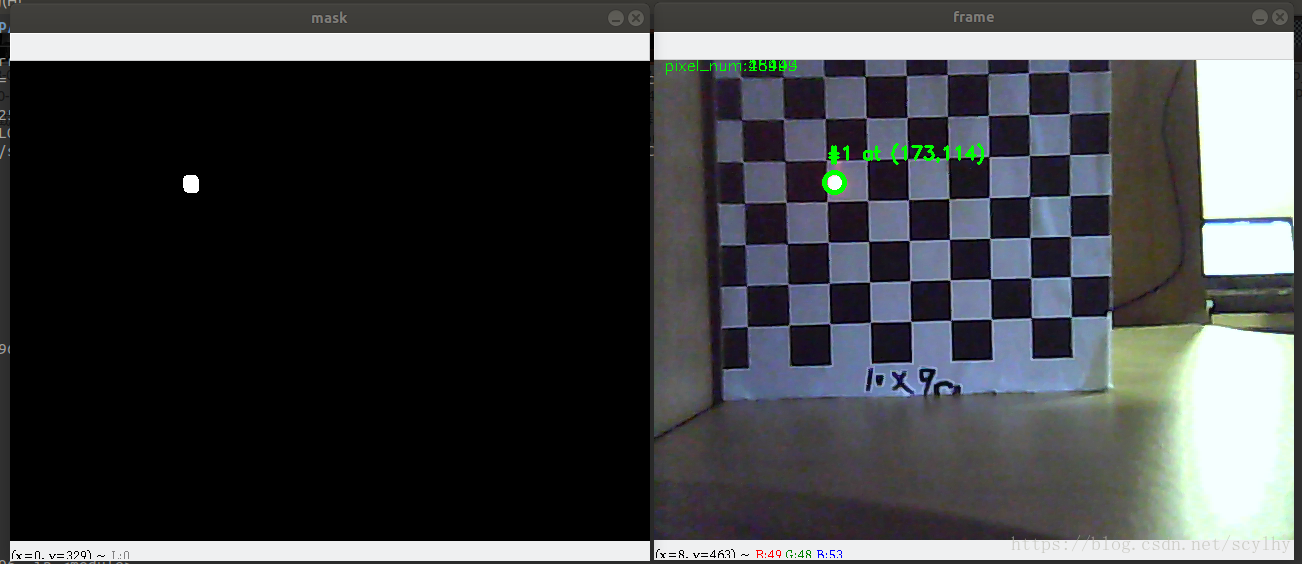
laser point detection
laser point detection 本文主要目的是通过检测激光点,通过相机光轴、激光束和激光点之前形成的几何关系求解距离信息,达到单目相机测距的功能。 检测结果 参考 1.DIY专区一、 用摄像头及激光来测距(opencv) 2.opencv激光点追踪代码 3.opencv-python中文教程:颜色空间转换 4.github.com/Ankur/OpenCV-Laser-

Ros中2D_Slam说明: turtlebot+kinect改写成turtlebot+laser(hokuyo)
转自:http://blog.csdn.net/zyh821351004/article/details/44103757 SLAM_turtlebot hokuyo 说明: 安装包:turtlebot turtlebot_apps hokuyo_node kobuki kinect 2D_Slam 参考链接: http://wik

Easy-Laser激光测平仪维修易激光对中仪E920
Easy-Laser激光对中仪常见故障:触摸屏损坏(屏碎,不显示,黑屏,蓝屏,无背光等),对中仪电路板损坏,对中仪接收装置电路板,对中仪发射控制装置电路板等均可维修。 脚中线的距离,注意该值要大于S-F1的值,要求输入四个距离参数,水平机械对中测量:1转动轴到9点钟位置,并按键记录这个测量值;2动轴到12点钟位置,并按键记录这一个测量值;3转动轴到3点钟位置,并按 键记录后一个测量值;4仪器

论文解读--L-Shape Model Switching-Based Precise Motion Tracking of Moving Vehicles Using Laser Scanners
摘要 对移动物体的检测和跟踪是自动驾驶汽车最基本的功能之一。为了准确地估计运动物体的动态信息,激光扫描仪以其高精度的距离数据被广泛应用。然而,这些数据仅表示面对传感器的物体表面,并随着时间的推移改变物体的外观。这种更改会对估计的动态状态产生意外的跟踪错误。为了最小化外观变化引起的跟踪误差,本文提出了一种基于L-Shape模型切换的跟踪算法。该算法在实际交通实验中得到了验证,并通过

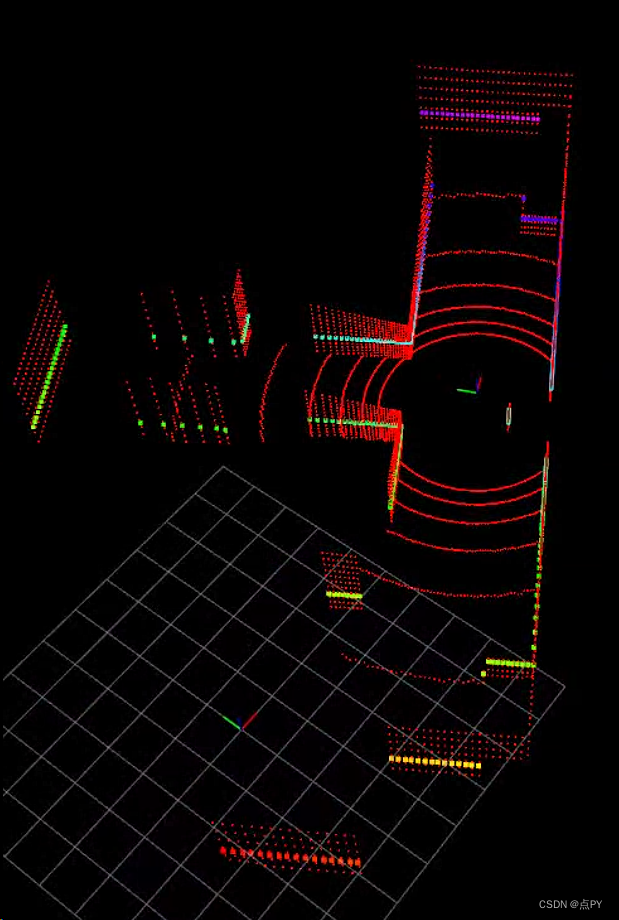
Efficient Online Segmentation for Sparse 3D Laser Scans-- 在线的稀疏点云分割
在这篇文章中就提出了一种十分高效的分割方法。首先是将扫描到的点云移除平面处理,然后移除平面后一定范围内的点云数据分割成不同的对象。该论文的是集中解决了在很小的计算量的条件下,能够在大多数系统上做到高效的分割。避免了直接对3D点云的计算,并直接在2.5D 的深度图像上进行操作。此方案能够很好的解决处理稀疏的3D点云数据。作者使用了新型Velodyne VLP-16扫描仪,并