本文主要是介绍激光笔(Laser pointer),希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
激光笔
激光笔(Laser pointer),又稱激光指示器,是将半導體激光模組(二極體)設計、加工制成的便攜、手易持握的发射可見激光的筆型發射器。常見的激光指示器有紅光(650-660nm, 635-640nm)、綠光(520-525nm, 532nm)、藍光(445-450nm, 465nm)、堇紫光(405nm)等,功率通常以毫瓦为单位。通常被匯報、教學或導賞人員用它來投映一個光點或光柱指向物體。因为激光會傷害到眼睛,可能引致的眼疾包括白內障、視網膜脫落及黃斑點水腫等,任何情況下都不應該讓激光直射眼睛。

激光笔(635nm紅光,520nm綠光,450nm藍光)
| 「Laser Pointer」的各地常用別名 | |
|---|---|
| 中国大陸 | |
| 臺灣 | |
| 香港 | |
| 澳門 | |
| 馬新 | |
激光笔的分类
早期的激光笔使用波长为633纳米(nm)的氦氖(HeNe)气体激光,通常用于产生能量不超过1毫瓦的激光束。最便宜的激光笔使用波长接近670/650nm的红色激光二极管。稍贵的则使用635nm的红-橙色二极管,这一波长更易于为人眼所识别。也有其他颜色的激光笔,最常见的是波长为532nm的绿光。最近几年,593.5nm的黄-橙激光笔也开始出现。2005年9月出现了473nm的蓝光激光笔。2010年初出现了波长为405nm的蓝光(其实是紫光)激光笔。2012年至2013年随着510/520nm激光二极管的推出,也开始出现510~520nm波长的蓝绿色激光笔。
激光笔照射出光点的表观亮度不光取决于激光的功率和表面反射率,还取决于人眼的色觉。例如,由于人眼对可见光谱中波长为520-570nm的绿光最敏感,对更红或者更蓝的波长敏感性下降,所以相同功率下绿光显得比其它颜色亮。
红/红-橙光
由于有产生该波长的激光二极管,所以其结构最简单,基本上仅是一个由电池做能源的二极管。红光激光笔最早出现于1980年代,是庞大笨重的价值数百美元的设备;现在则很小并且很便宜。近些年出现了波长为671nm的二极管泵浦固体激光(DPSS)红光激光笔。虽然该波长可以用便宜的二极管(用在DVD機內的650nm紅色激光)得到,但是DPSS技术可以产生质量更高,频段更窄的激光。
黄光
最近市场上出现了波长为593.5nm的黄光激光笔。基于DPSS技术将波长为1064nm和1342nm的两束激光通过一非线性晶体相加而得到。该过程的复杂使得黄光激光笔不稳定且低效率,随温度变化输出功率在1-10毫瓦,如果过热或过冷还会发生模式跳跃。这是因为激光笔的尺寸导致无法提供所需的温度稳定和冷却部件。另外,大部分593.5nm激光笔工作在脉冲模式下以便采用尺寸和功率较小的泵浦二极管。
綠光
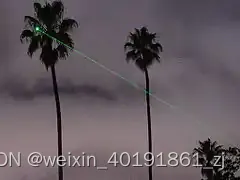
一个5mW绿光激光笔在夜晚指向一颗棕榈树。注意因为瑞利散射和空中的尘埃,使光束是可见的。
使用波長808nm紅外激光激發非線性晶體,產生1064nm紅外光,再經倍頻產生532nm綠光,屬於半导体泵浦固体激光(DPSS)。
一些绿光激光器工作在脉冲或者准连续模式下来减少冷却问题,延长电池寿命。
近期宣布的不需要倍频的绿光激光有着更高的效率,常见的波长有520nm和525nm。
在夜晚即使是低功率的绿光由于大气分子的瑞利散射也可以看见,这种激光笔常被天文学爱好者们用于指点恒星和星座。绿光激光笔可以有多种输出功率。5mW(三类a)使用起来最安全,并且在较暗照明下也可见,所以为指点目的是不需要更强的功率。
藍光
原來只有經DPSS產生的473nm藍色激光,功率偏低及不穩定。近來,隨著CASIO開發出包含藍色激光二極管(450nm)的混合光源高亮度投影機,功率高達1000mW以上的藍光半導體二極管被大量生產而普及化。
堇紫光
条目:藍光
使用波長405nm的堇紫色激光二極管(使用在藍光光碟內),屬於半導體激光,接近紫外光波段,可視度較低,但能激發螢光,具有驗鈔和檢驗化學品作用。
安全性和管制
美國國家標準的雷射警示標籤

歐洲的雷射警示標誌
在美国,激光由美国国家标准学会和美国食品药品监督管理局(FDA)分类。功率小于1毫瓦的可见光(波长400-700nm)激光笔为第二类(Class 2 或 II);功率介于1-5毫瓦的为第三类A(Class 3A 或 IIIa)。第三类B(Class 3B/IIIb)激光(功率5–500毫瓦)和第四类(Class 4/IV)激光(功率大于500毫瓦)按法律不能以激光笔的名义推广销售。
2014年3月15日的中国中央电视台“315晚会”曝光了激光笔的潜在危害,随后淘宝网上的激光笔及相关产品全部下架。
爭議事件
2019年8月6日,香港浸會大學學生會會長方仲賢在深水埗購買激光筆觀星後(此处觀星为主观表述),遭便衣警察指他涉嫌藏有攻擊性武器。大批民眾包圍深水埗警署,最後香港警方當晚出動防暴警察及催淚彈驅散民眾。
这篇关于激光笔(Laser pointer)的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!