本文主要是介绍laser point detection,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
laser point detection
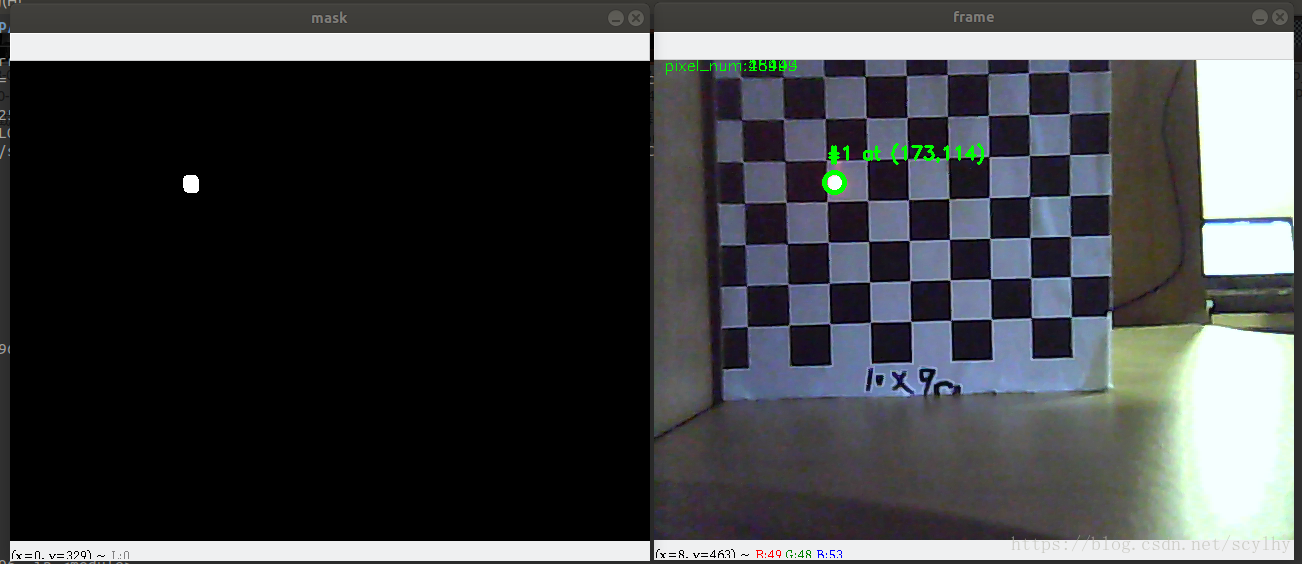
本文主要目的是通过检测激光点,通过相机光轴、激光束和激光点之前形成的几何关系求解距离信息,达到单目相机测距的功能。
检测结果
参考
1.DIY专区一、 用摄像头及激光来测距(opencv)
2.opencv激光点追踪代码
3.opencv-python中文教程:颜色空间转换
4.github.com/Ankur/OpenCV-Laser-Tracker
5.OpenCV-Laser-Tracker
6. Laser pointer detect and track
7.stack overflow:laser curved line detection using opencv and python
8.Python视觉处理(四)HSV处理
9.用python3 opencv3 实现相机学生证的实时跟踪
10.Opencv中SimpleBlobDetector的使用(斑点检测)
11.【转】使用OpenCV进行斑点检测Blob Detection Using OpenCV ( Python, C++ )
12.重点参考该内容:pyimagesearch.com:Detecting multiple bright spots in an image with Python and OpenCV
13.OpenCV 形状分析(上):计算轮廓中心
14.三角测距法的原理code
#!/usr/bin/python3
# import the necessary packages
from imutils import contours
from skimage import measure
import numpy as np
#import argparse
import imutils
import cv2
import mathCAM=2
cap = cv2.VideoCapture(CAM)def nothing(x):pass#添加参数控制
cv2.namedWindow("params")
cv2.createTrackbar("manual","params",0,1,nothing)
cv2.createTrackbar("pixels_num","params",0,2000,nothing)ret,frame=cap.read()
W=frame.shape[0]
H=frame.shape[1]while True:ret,frame=cap.read()image=frame# load the image, convert it to grayscale, and blur itgray = cv2.cvtColor(image, cv2.COLOR_BGR2GRAY)blurred = cv2.GaussianBlur(gray, (11, 11), 0)# threshold the image to reveal light regions in the# blurred imagethresh = cv2.threshold(blurred, 200, 255, cv2.THRESH_BINARY)[1]# perform a series of erosions and dilations to remove# any small blobs of noise from the thresholded imagethresh = cv2.erode(thresh, None, iterations=2)thresh = cv2.dilate(thresh, None, iterations=4)# perform a connected component analysis on the thresholded# image, then initialize a mask to store only the "large"# componentslabels = measure.label(thresh, neighbors=8, background=0)mask = np.zeros(thresh.shape, dtype="uint8")MANUAL=cv2.getTrackbarPos("manual","params")PIXEL_THRESH=cv2.getTrackbarPos("pixels_num","params") if MANUAL==1 else 500# loop over the unique componentsfor label in np.unique(labels):# if this is the background label, ignore itif label == 0:continue# otherwise, construct the label mask and count the# number of pixelslabelMask = np.zeros(thresh.shape, dtype="uint8")labelMask[labels == label] = 255numPixels = cv2.countNonZero(labelMask)# 通过斑点的像素面积确定激光斑点 #if numPixels > 300:#print(numPixels) #debugcv2.putText(image, "pixel_num:{}".format(numPixels), (10, 10),cv2.FONT_HERSHEY_SIMPLEX, 0.5, (0, 255, 0), 1)if numPixels <PIXEL_THRESH: #亮斑过滤,可调参数149 ,500,1269mask = cv2.add(mask, labelMask)# find the contours in the mask, then sort them from left to# rightcnts= cv2.findContours(mask.copy(), cv2.RETR_EXTERNAL,cv2.CHAIN_APPROX_SIMPLE)#不同返回参数,不是一个算法!!? 打包成一个对象了#im,cnts,hierarchy = cv2.findContours(mask.copy(), cv2.RETR_EXTERNAL,cv2.CHAIN_APPROX_SIMPLE)if len(cnts) <2:print("未检测到轮廓")continuecnts = cnts[0] if imutils.is_cv2() else cnts[1] #用以区分OpenCV2.4和OpenCV3 #cnts = contours.sort_contours(cnts)[0]cnts = sorted(cnts, key = cv2.contourArea, reverse = True)[:5] #保留最大轮廓 # loop over the contoursfor (i, c) in enumerate(cnts):# draw the bright spot on the image(x, y, w, h) = cv2.boundingRect(c)((cX, cY), radius) = cv2.minEnclosingCircle(c)cv2.circle(image, (int(cX), int(cY)), int(radius),(0, 255, 0), 3)cv2.circle(image, (int(H/2), int(W/2)), int(3),(0, 0, 255), -1)cv2.putText(image, "#{} at ({},{})".format(i + 1,x,y), (x, y - 15),cv2.FONT_HERSHEY_SIMPLEX, 0.6, (0, 255, 0), 2)X=math.pow(abs(W/2-y),2) #|方向X=X+math.pow(abs(H/2-x),2) #-方向X1=abs(H/2-x)X2=abs(W/2-y)print("X_:",X1)print("X|:",X2)#X=math.sqrt(X)X=X1if X==0:continueprint("X:",X)D=797.292/X*3.5 #camL f=797.29#D=832.52/X*3.5 #camR f=832.52print("D:",D,"cm")breakcv2.imshow("mask",mask)cv2.imshow("image",image)k=cv2.waitKey(40)&0xffif k==27:break
cap.release()
cv2.destoryAllWindows()
这篇关于laser point detection的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!







