本文主要是介绍Point cloud转 Laser sacn,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
文章目录
- 概要
- 安装pointcloud_to_laserscan
- 修改配置
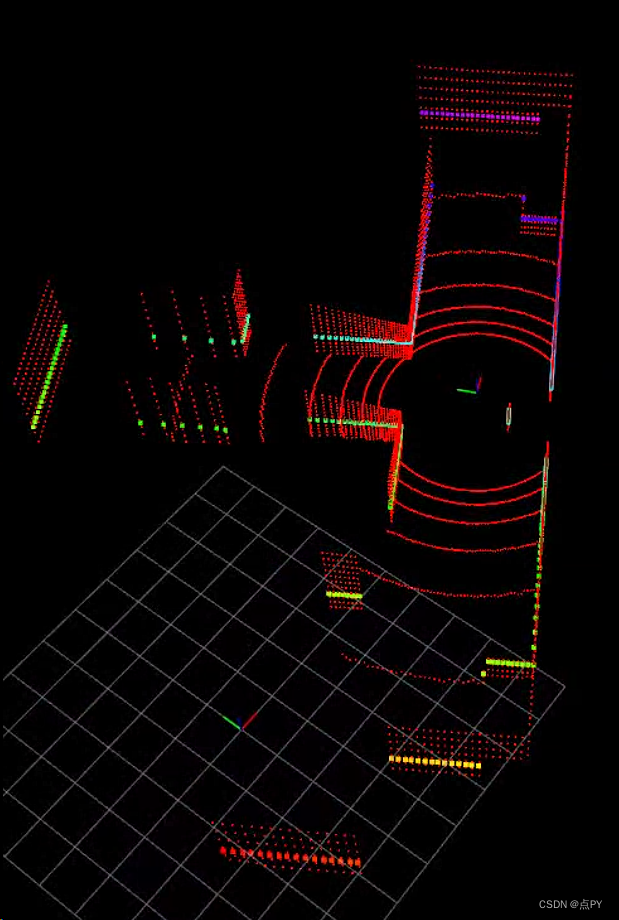
- 运行结果
概要
在ROS中将点云(PointCloud)转换为激光扫描(LaserScan)是一个常见的任务,尤其是在某些机器人系统中,激光雷达数据被用于导航和避障,但传感器输出的是点云数据。这种转换可以通过 pointcloud_to_laserscan 包实现,该包提供了一个节点,可以将接收到的PointCloud2消息转换成LaserScan消息。
安装pointcloud_to_laserscan
mkdir -p ~/catkin_ws/src
cd ~/catkin_ws/src
git clone -b lunar-devel https://github.com/ros-perception/pointcloud_to_laserscan.git
cd ..
catkin_make
修改配置
<?xml version="1.0"?><launch><!-- run pointcloud_to_laserscan node --><node pkg="pointcloud_to_laserscan" type="pointcloud_to_laserscan_node" name="pointcloud_to_laserscan"><remap from="cloud_in" to="/lio_sam/deskew/cloud_deskewed"/><rosparam>target_frame: base_link_est # Leave disabled to output scan in pointcloud frametransform_tolerance: 0.01min_height: -0.5max_height: 0.2angle_min: -3.1415926 # -M_PIangle_max: 3.1415926 # M_PIangle_increment: 0.003 # M_PI/360.0scan_time: 0.1range_min: 0.3range_max: 50use_inf: trueinf_epsilon: 1.0# Concurrency level, affects number of pointclouds queued for processing and number of threads used# 0 : Detect number of cores# 1 : Single threaded# 2->inf : Parallelism levelconcurrency_level: 1</rosparam></node></launch>运行结果
这篇关于Point cloud转 Laser sacn的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!







