isaac专题

Isaac Sim仿真平台学习(2)基础知识
目录 0.前言 1.isaac sim的组建 1.Isaac Lab的资料 2.PhysX 3.RTX 4.Digital Twins 5.Replicator 6.Omnigraph 0.前言 难得更新阿,今天黑猴发布了没有去玩,跑来更新博客,本来想着按宇树的go2开发指南去试试RL的,但可惜没成功(可能我哪个步骤错了吧,挠了半天头),宇树使用的老版的isaac ga

Nvidia Isaac Sim 入门教程 2024(2)安装与配置
Isaac Sim 安装与环境配置 版权信息 Copyright 2023-2024 Herman Ye@Auromix. All rights reserved.This course and all of its associated content, including but not limited to text, images, videos, and any other mat
Isaac Lab 安装与初体验 (windows环境)
在最新发布的Isaac sim4.0最大的亮点是融合了Isaac Lab,Isaac Lab 将取代之前发布的机器人学习框架,包括 Isaac Gym Preview Release 的 IsaacGymEnvs、Isaac Sim 的 OmniIsaacGymEnvs 和 Isaac Sim 的 Orbit。以前发布的框架已弃用,官方鼓励用户按照迁移指南过渡到 Isaac Lab。 Isa
Isaac Sim 6 仅使用isaacsim中自带的工具进行语义分割、实例分割(学习笔记5.09)
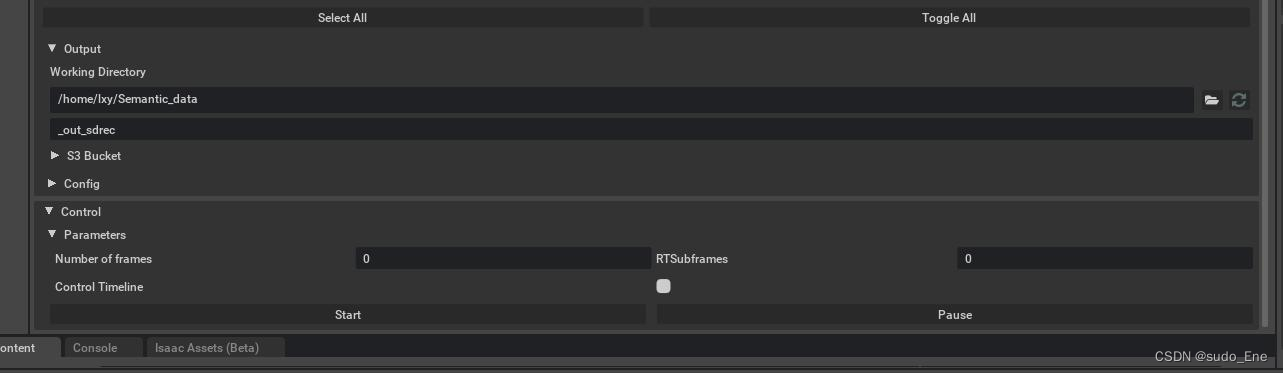
一.概要 建立场景,给场景内的物体赋予语义,使用Replicator进行分割操作,从而获得带标签信息的mask掩码图,可作为数据集、验证集等训练使用。 二.具体操作步骤 场景部分 1.搭建一个基础场景 这里建议在搭建的时候就按类别分好类,方便一起赋予语义 如下图,将树木、岩石、灌木、草地的物体都整理好 2.给场景中的物体赋予语义 (1)在上方导航栏中,找到R
Isaac Sim 1(学习笔记2024.4.22)
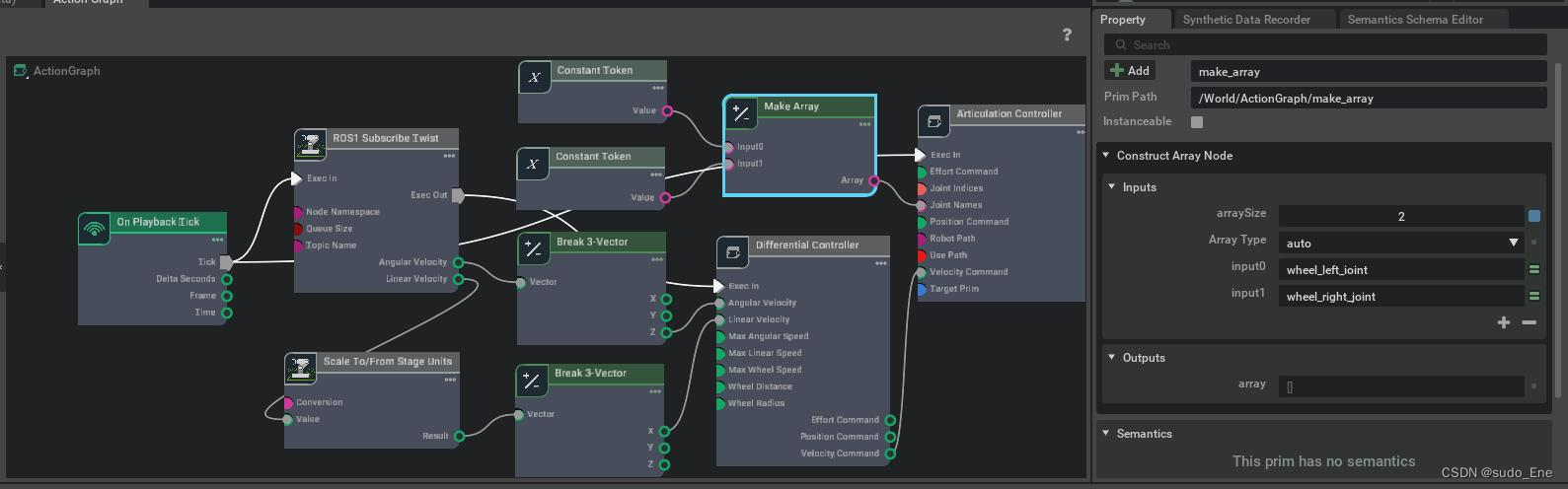
仅作为个人学习笔记使用,防止一转头就找不到了 一.ROS bridge 1.On Playback Tick 节点: 在模拟“播放”时生成一个时钟信号。接收到该节点发出的时钟信号的节点将在每个模拟步骤中执行它们的计算函数。 2.ROS Subscribe Twist 节点: 订阅 Twist 消息。在其属性选项卡中的 topicName 字段中指定 Rostopic 的名称

NVIDIA 发布 Project GR00T 人形机器人基础模型和 Isaac 机器人平台重大更新
系列文章目录 前言 Isaac 机器人平台现可为开发者提供全新的机器人训练仿真器、Jetson Thor 机器人计算机、生成式 AI 基础模型和由 CUDA 加速的感知和操作库。 Project GR00T 是一种多模态人形机器人通用基础模型,作为机器人的大脑,使它们能够学习技能来解决各种任务。 美国加利福尼亚州圣何塞 —— GTC —— 太平洋时间 202

Orbit 使用指南 10|在机器人上安装传感器 | Isaac Sim | Omniverse
如是我闻: 资产类(asset classes)允许我们创建和模拟机器人,而传感器 (sensors) 则帮助我们获取关于环境的信息,获取不同的本体感知和外界感知信息。例如,摄像头传感器可用于获取环境的视觉信息,接触传感器可以用来获取机器人与环境的接触信息。 在本指南中,我们将看到如何给机器人添加不同的传感器。我们将在本指南中使用ANYmal-C机器人。ANYmal-C是一款四足机器人,拥有12

Orbit 使用指南 08 | 登记注册环境 | Isaac Sim | Omniverse
如是我闻: 在上一个指南中,我们学习了如何创建一个自定义的车杆环境。我们通过导入环境类及其配置类来手动创建了一个环境实例 # create environment configurationenv_cfg = CartpoleEnvCfg()env_cfg.scene.num_envs = args_cli.num_envs# setup RL environmentenv = RLTa

Orbit 使用指南 02 | 在场景中生成原始对象| Isaac Sim | Omniverse
如是我闻: Orbit使用指南02将 深入探讨如何使用Python代码在Orbit中向场景生成各种对象(或原始对象)。一起探索如何生成地面平面、灯光、基本图形形状以及来自USD文件的网格。前置知识:如何生成空白场景,Orbit 使用指南 01 指南02对应于orbit/source/standalone/tutorials/00_sim目录下的spawn_prims.py脚本。让我们先瞅一瞅这
Isaac Sim 仿真机器人urdf文件导入
本教程展示如何在 Omniverse Isaac Sim 中导入 urdf 一. 使用内置插件导入urdf 安装urdf 插件 方法是转到“window”->“Extensions” 搜索框中输入urdf, 并启用 通过转至Isaac Utils -> Workflows -> URDF Importer菜单来访问 urdf 扩展。 表格中的 1,2,3 对应着上图中的1,2,3
Isaac Sim urdf文件导入
本教程展示如何在 Omniverse Isaac Sim 中导入 urdf 一. 使用内置插件导入urdf 安装urdf 插件 方法是转到“window”->“Extensions” 搜索框中输入urdf, 并启用 通过转至Isaac Utils -> Workflows -> URDF Importer菜单来访问 urdf 扩展。 表格中的 1,2,3 对应着上图中的1,2,3

Isaac Sim教程01 Isaac Sim介绍
Isaac Sim 介绍 版权信息 Copyright 2023 Herman Ye@Auromix. All rights reserved.This course and all of its associated content, including but not limited to text, images, videos, and any other materials, ar
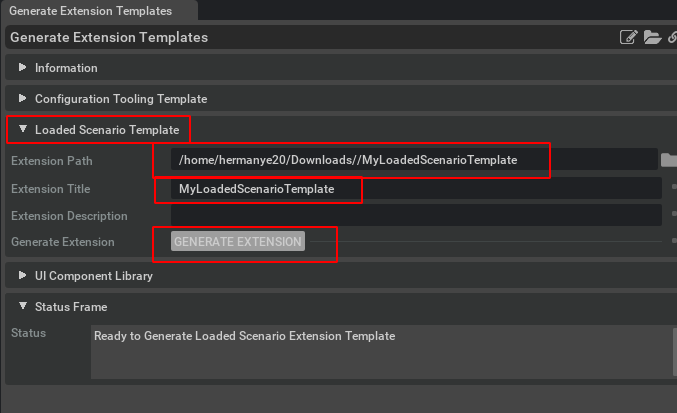
Isaac Sim教程07 拓展编程Extension
Isaac Sim 拓展编程Extension 版权信息 Copyright 2023 Herman Ye@Auromix. All rights reserved.This course and all of its associated content, including but not limited to text, images, videos, and any other ma
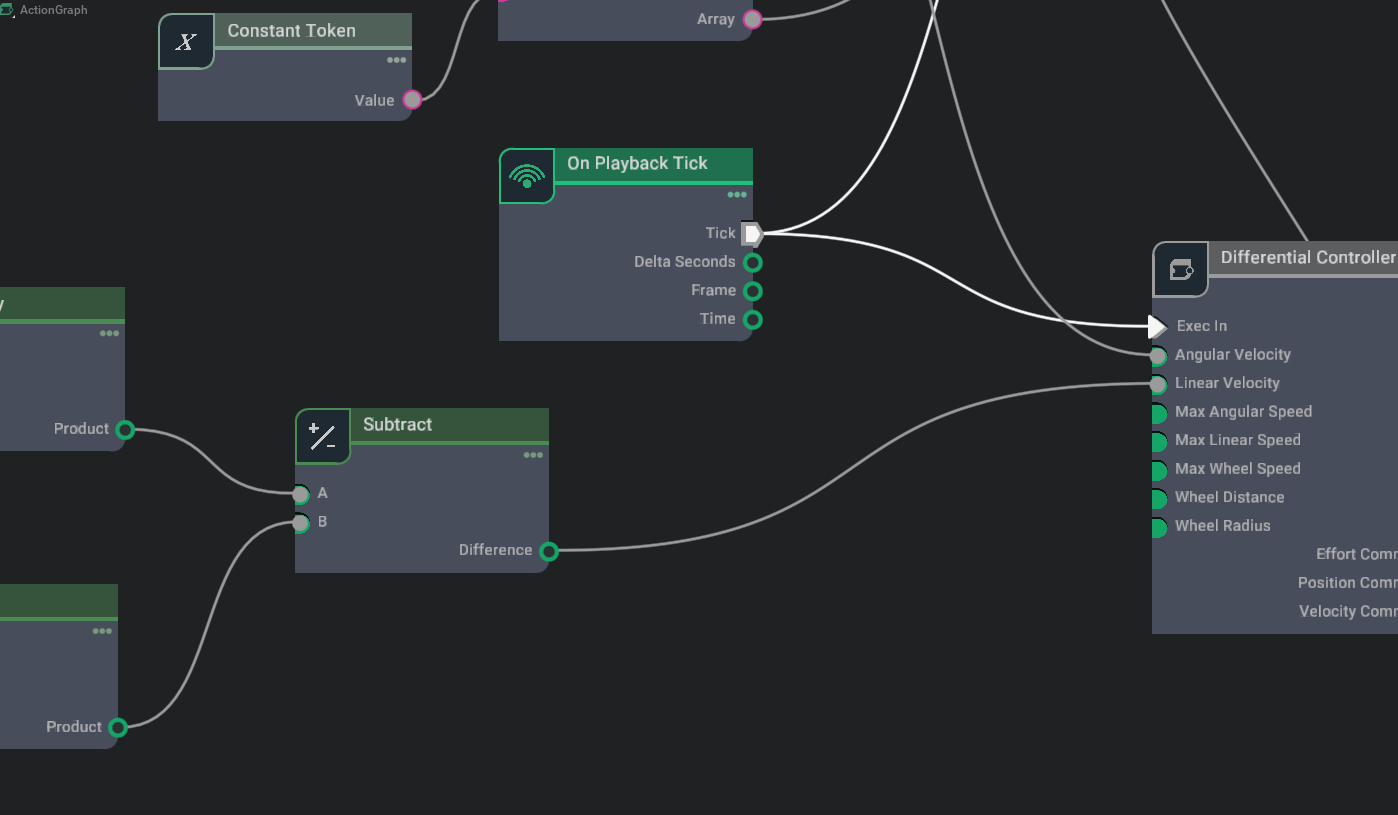
Isaac Sim教程06 OmniGraph图编程
Isaac Sim OmniGraph图编程 版权信息 Copyright 2023 Herman Ye@Auromix. All rights reserved.This course and all of its associated content, including but not limited to text, images, videos, and any other mat