本文主要是介绍Isaac Lab 安装与初体验 (windows环境),希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
在最新发布的Isaac sim4.0最大的亮点是融合了Isaac Lab,Isaac Lab 将取代之前发布的机器人学习框架,包括 Isaac Gym Preview Release 的 IsaacGymEnvs、Isaac Sim 的 OmniIsaacGymEnvs 和 Isaac Sim 的 Orbit。以前发布的框架已弃用,官方鼓励用户按照迁移指南过渡到 Isaac Lab。

Isaac Lab 建立在 Isaac Sim 之上,为利用最新仿真技术的机器人学习提供统一而灵活的框架。它被设计为模块化和可扩展的,旨在简化机器人研究中的常见工作流程(例如 RL、从演示中学习和运动规划)。虽然它包括一些预构建的环境、传感器和任务,但其主要目标是提供一个开源、统一且易于使用的界面,用于开发和测试自定义环境和机器人学习算法。它不仅继承了 Isaac Sim 的功能,还增加了许多与机器人学习研究相关的新功能。例如,在仿真中包括执行器动力学、程序化地形生成以及支持从人类演示中收集数据。
参考官方安装文档:
使用 Isaac Sim Binaries 进行安装 — Isaac Lab 文档 --- Installation using Isaac Sim Binaries — Isaac Lab documentation (isaac-sim.github.io)
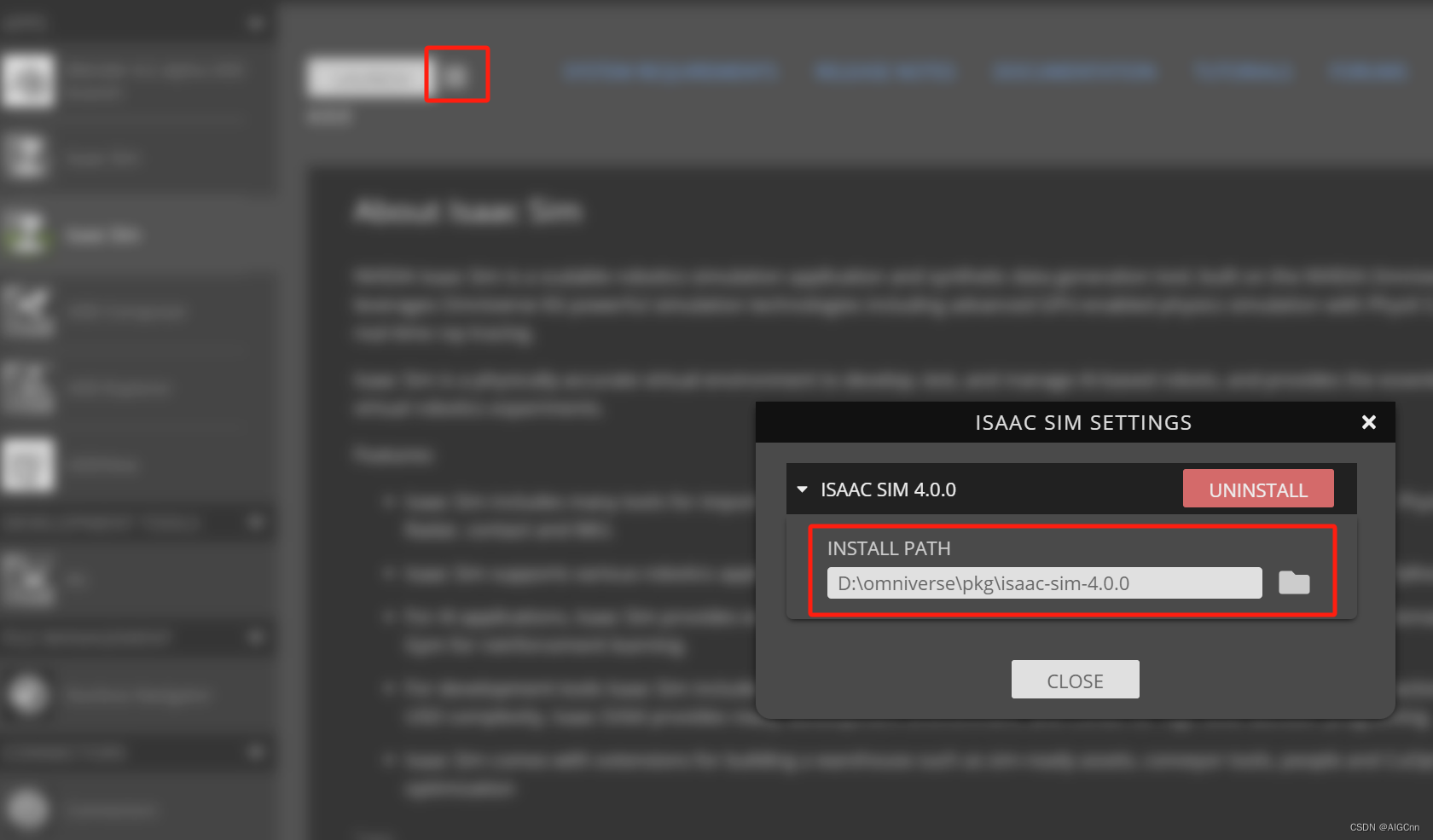
1、首先需要安装isaac sim4.0
这里使用Omniverse来安装,安装好后,可以在Settings里看到安装路径
2、找一个目录,下载IsaacLab工程
# Option 2: With HTTPS
git clone https://github.com/isaac-sim/IsaacLab.git打开工程,可以试着运行bat脚本查看帮助:
isaaclab.bat --helpusage: isaaclab.bat [-h] [-i] [-f] [-p] [-s] [-v] [-d] [-c] -- Utility to manage Isaac Lab.optional arguments:-h, --help Display the help content.-i, --install [LIB] Install the extensions inside Isaac Lab and learning frameworks (rl-games, rsl-rl, sb3, skrl) as extra dependencies. Default is 'all'.-f, --format Run pre-commit to format the code and check lints.-p, --python Run the python executable provided by Isaac Sim or virtual environment (if active).-s, --sim Run the simulator executable (isaac-sim.bat) provided by Isaac Sim.-t, --test Run all python unittest tests.-v, --vscode Generate the VSCode settings file from template.-d, --docs Build the documentation from source using sphinx.-c, --conda [NAME] Create the conda environment for Isaac Lab. Default name is 'isaaclab'.
3、创建 Isaac Sim 符号链接(官方文档里路径/有问题,改成\):
# 打开IsaacLab目录
cd IsaacLab
# 使用 mklink 创建符号链接
mklink /D _isaac_sim path_to_isaac_sim
# 例如: mklink /D _isaac_sim C:\Users\nvidia\AppData\Local\ov\pkg\isaac-sim-4.0.0
# 作者的: mklink /D _isaac_sim D:\omniverse\pkg\isaac-sim-4.0.0还有需要使用管理员命令打开cmd:

4、设置conda环境可选(建议使用conda)
# 选项1,使用默认配置: Default name for conda environment is 'isaaclab'
isaaclab.bat --conda请确保在运行任何脚本之前激活该环境:
conda activate isaaclab1. To activate the environment, run: conda activate isaaclab
2. To install Isaac Lab extensions, run: isaaclab -i
4. To perform formatting, run: isaaclab -f
5. To deactivate the environment, run: conda deactivateps: conda 激活 isaaclab时报的错误可以忽略
Did not find VSINSTALLDIR
Windows SDK version found as: "10.0.22621.0"
The system cannot find the path specified.
Did not find VSINSTALLDIR
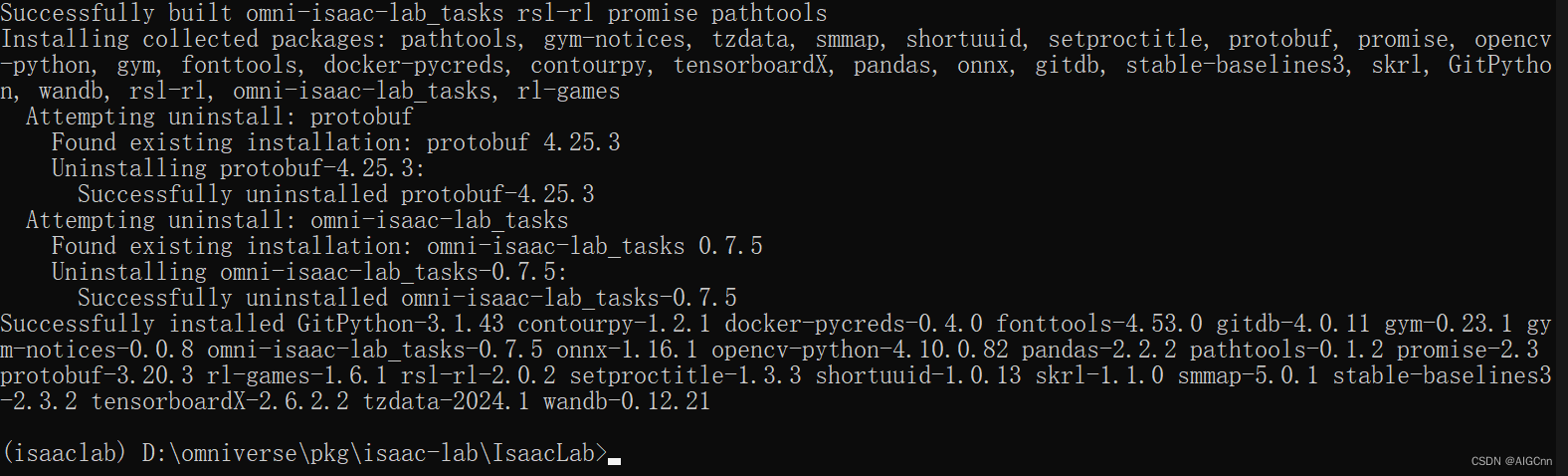
5、完全安装 isaaclab
isaaclab.bat --installps: 最好能科学上网,否则资源下载可能会不成功
安装成果:
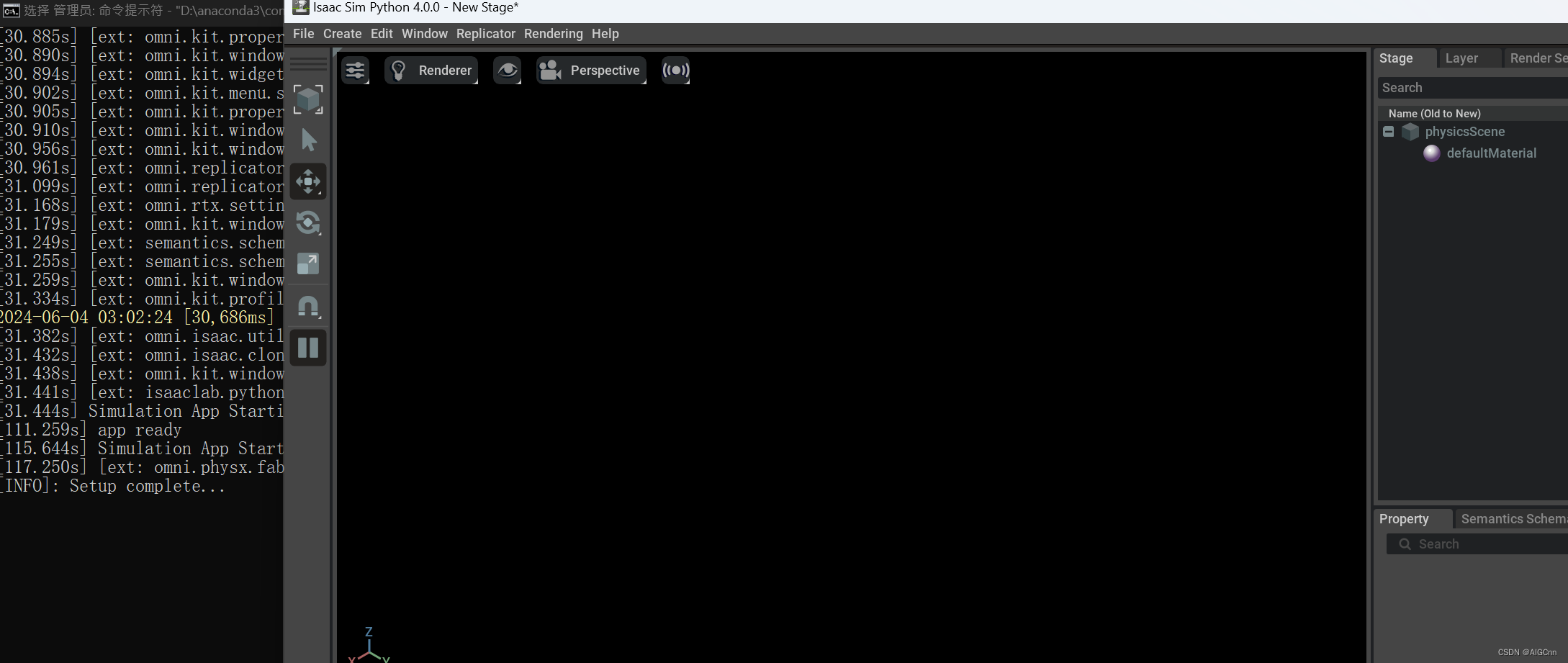
6、验证安装,这里在 conda里运行,用方法二启动示例
# 方法1: Using the isaaclab.bat executable
# note: this works for both the bundled python and the virtual environment
isaaclab.bat -p source\standalone\tutorials\00_sim\create_empty.py# 方法2: Using python in your virtual environment
python source\standalone\tutorials\00_sim\create_empty.py运行成功,展示了一个空的场景:
7、更多例程体验
运行现有脚本 — Isaac Lab 文档 --- Running Existing Scripts — Isaac Lab documentation (isaac-sim.github.io)
这里对无人机比较感兴趣,启动例程:
python source\standalone\demos\quadcopter.py打开看到这是一个简单的无人机悬停的例子,每2000步重置无人机;
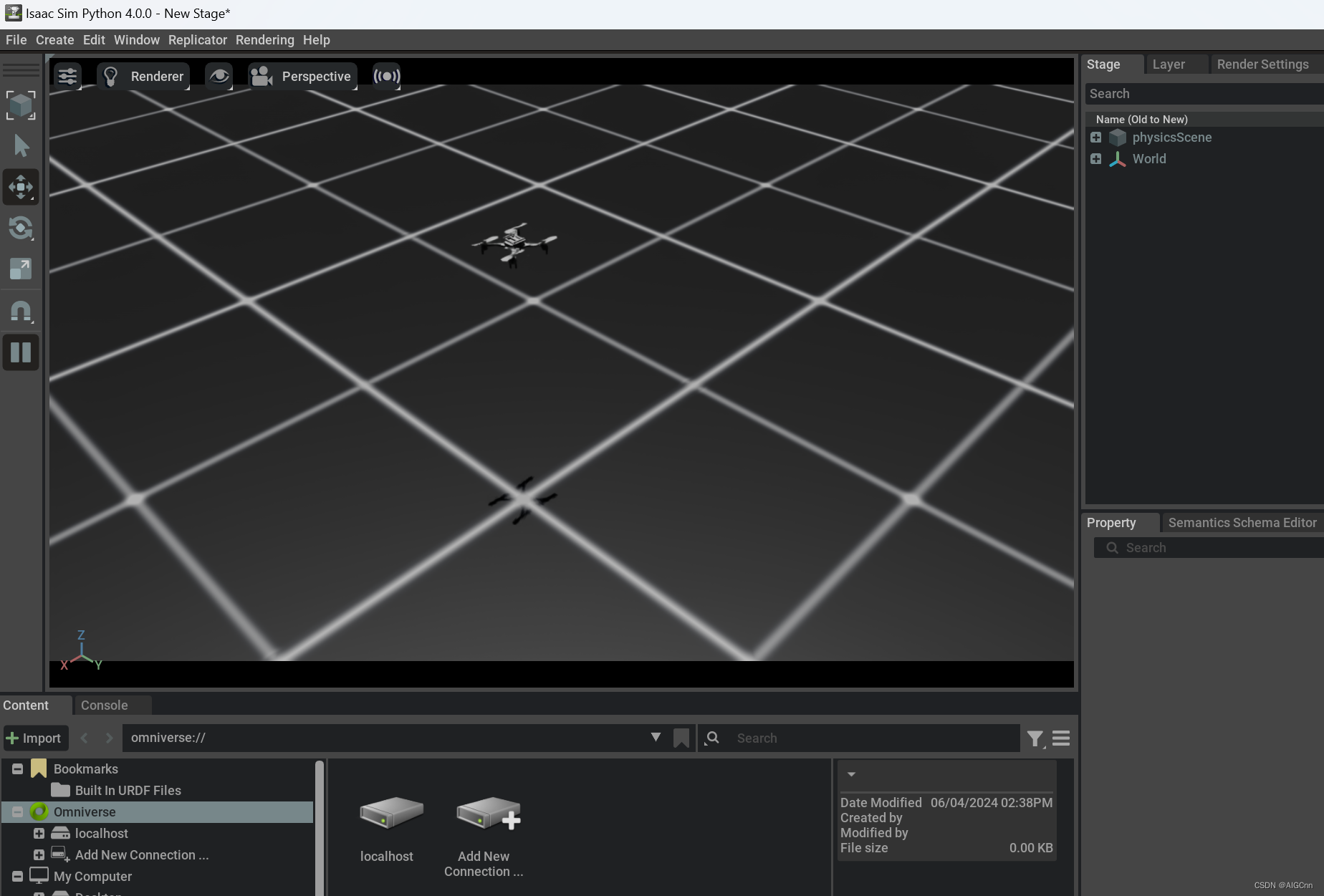
ps: 如果遇到打开卡在,那么大概率是usd资源获取不到,可以改usd路径,或者配置Nucleus,或者使用代理等;
这篇关于Isaac Lab 安装与初体验 (windows环境)的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!








