fpfh专题

【译】PCL官网教程翻译(17):快速点特征直方图(FPFH)描述符 -Fast Point Feature Histograms (FPFH) descriptors
英文原文阅读 快速点特征直方图(FPFH)描述符 计算复杂度直方图(见点特征直方图(PFH)描述符)对于一个给定的有 n n n个点的点云 P P P为 O ( n k 2 ) O (nk ^ 2) O(nk2), k k k是每个点P的最邻近点个数。对于要求实时或接近实时的应用程序,密集点的特征直方图的计算效率是一个一个主要问题。 本教程描述了PFH公式的简化,称为快速点特征直方图(FPF
![[PCL]计算关键点处的特征并且可视化(iss/sift+fpfh/pfh/shot)](https://img-blog.csdnimg.cn/20200613003751193.png?x-oss-process=image/watermark,type_ZmFuZ3poZW5naGVpdGk,shadow_10,text_aHR0cHM6Ly9ibG9nLmNzZG4ubmV0L3N1eXVuenp6,size_16,color_FFFFFF,t_70)
[PCL]计算关键点处的特征并且可视化(iss/sift+fpfh/pfh/shot)
目录 计算关键点计算关键点处的特征描述建立匹配关系估计位姿(配准)可视化可视化关键点可视化特征直方图可视化对应关系 参考全部代码 计算关键点 clock_t start = clock();// 计算关键点pcl::ISSKeypoint3D<pcl::PointXYZ, pcl::PointXYZ> iss_det;pcl::search::KdTree<pcl::Po

pcl中的PFH和FPFH
目录 PFH点特征直方图计算方式vector组合方式 FPFHFAST点特征直方图计算方式 参考 PFH 点特征直方图计算方式 注意 这里图上标注的角度并不是真实的角度,而是对应角度的余弦值(按理说是内积,但是模长都是1),可以从这个代码中的pcl::computePairFeatures函数看出: boolpcl::computePairFeatures (const
FPFH特征描述符、对应关系可视化以及ICP配准
一、FPFH特征描述符可视化 C++ #include <pcl/point_types.h>#include <pcl/point_cloud.h>#include <pcl/search/kdtree.h>#include <pcl/io/pcd_io.h>#include <pcl/features/normal_3d_omp.h>//使用OMP需要添加的头文件#include

open3d使用fpfh做点云配准
目录 写在前面准备编译open3d配准example 编译demo配准测试参考完 写在前面 1、环境:win10,cmake3.22.0-rc1,环境:win10,cmake3.22.0-rc1,已编译好的open3d 0.13 2、源码使用的是官方example https://github.com/isl-org/Open3D/blob/master/examples/cpp

PFH和FPFH详解
1.PFH由来 点特征的描述子一般是基于点坐标、法向量、曲率来描述某个点周围的几何特征。用点特征描述子不能提供特征之间的关系,减少了全局特征信息。因此诞生了一直基于直方图的特征描述子:PFH--point feature histogram(点特征直方图)。 2.PFH的原理 PFH通过参数化查询点和紧邻点之间的空间差异,形成了一个多维直方图对点的近邻进行几何描述,直方图提供的信息对于点云具

PCL中PFH、FPFH理论
基本概述 快速点特征直方图(Fast Point Feature Histograms,FPFH)是一种基于点及其邻域点之间法向夹角、点间连线夹角关系的特征描述子,是一种由点特征直方图(Point feature Histograms,PFH)改进的算法,保留了PFH中对点描述的主要几何特性,并将计算复杂度从O(nk^2)降低到O(nk),其中n为点云数据中点的个数,k为每个点的邻域包含的点的个
快速点特征直方图(FPFH)描述符(Fast Point Feature Histograms (FPFH) descriptors)
点要素直方图的理论计算复杂性(见 点要素直方图(PFH)描述)为给定的ñ点组成的点云P是O(NK ^ 2),这里ķ是对在 P中的每个p点邻居的数量。对于实时或接近实时的应用,密集点邻域中的点特征直方图的计算可能代表主要的瓶颈之一。 本教程描述了PFH公式的简化,称为快速点特征直方图(FPFH)(参见Rusu论文以获取更多信息),这样可以降低算法的计算复杂度O(NK),同时仍保留大部分PFH的判别

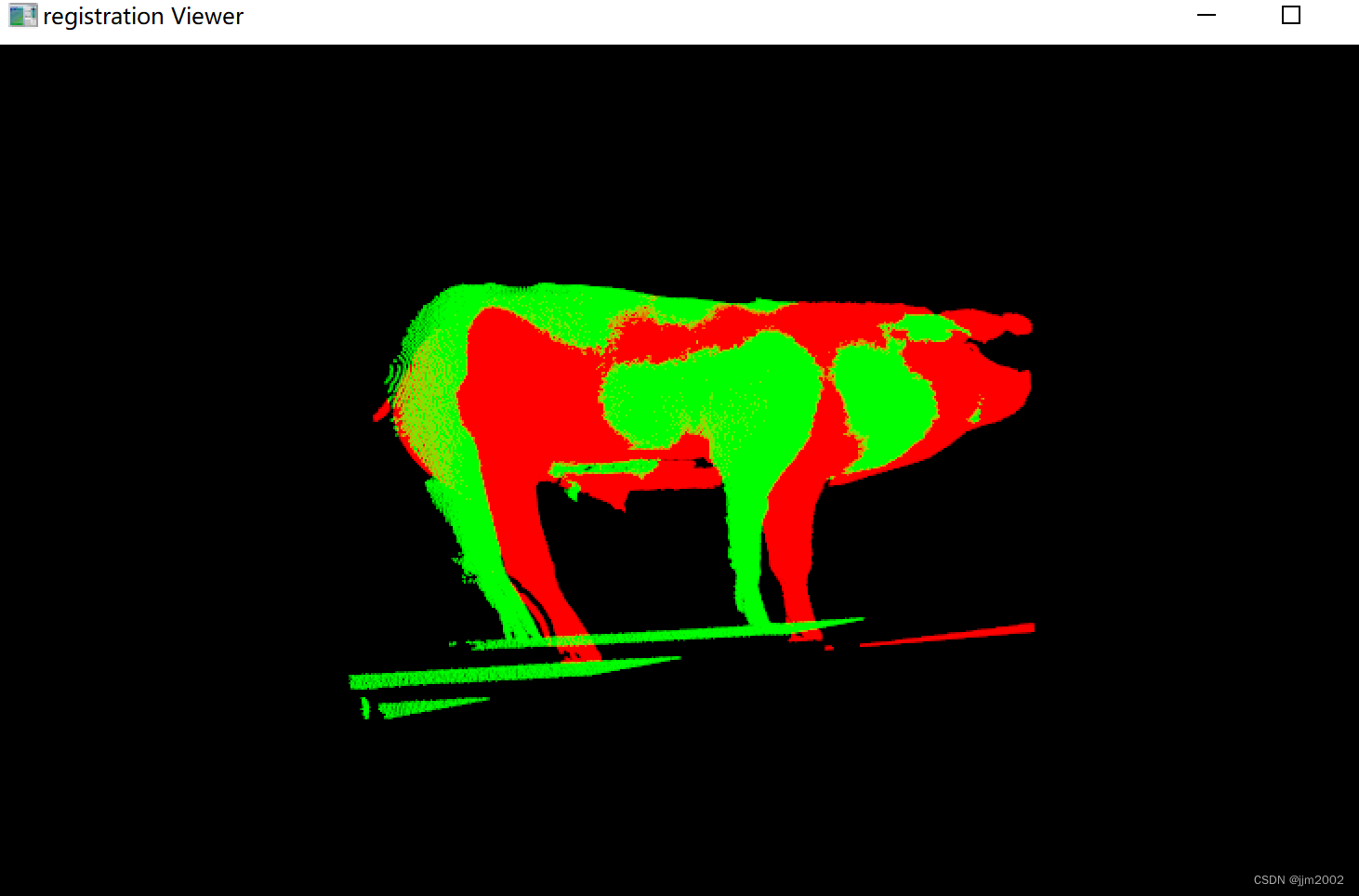
PCL点云处理之基于FPFH特征的全局配准流程具体实现(二百二十一)
PCL点云处理之基于FPFH特征的全局配准流程具体实现(二百二十一) 一、算法介绍二、算法实现1.代码2.效果 一、算法介绍 PCL点云库提供的多种工具,可以组合为一套完整的点云配准流程,这里选择FPFH特征,进行具体的配准流程实现,主要内容包括点云读取、点云法线计算、点云特征计算、特征匹配对计算、匹配矩阵计算、点云旋转平移变换、结果点云保存等一套完成的配准所需代码,直接复制粘