evo专题

什么是Win64:Evo-gen
什么是Win64:Evo-gen? Win64:Evo-gen 是一种被检测到的恶意软件。在相关搜索结果中,Avast 检测到一些文件存在如“C:\\Users\\123\\Desktop\\18X\\Rufus_setup.exe (L) Win64:Evo-gen (Trj)”这样的情况。同时,在其他场景中,如 Python - Webdriver 中,Avast 发现恶意软件“win32:

区间预测 | Matlab实现EVO-CNN-SVM能量谷算法优化卷积神经网络支持向量机结合核密度估计多置信区间多变量回归区间预测
区间预测 | Matlab实现EVO-CNN-SVM能量谷算法优化卷积神经网络支持向量机结合核密度估计多置信区间多变量回归区间预测 目录 区间预测 | Matlab实现EVO-CNN-SVM能量谷算法优化卷积神经网络支持向量机结合核密度估计多置信区间多变量回归区间预测效果一览基本介绍程序设计参考资料 效果一览 基本介绍 1.Matlab实现EVO-CNN-SVM

MWM燃气发动机TEM控制系统维修TEM-EVO触摸屏 工业液晶显示屏深圳捷达工控维修
MWM 燃气发动机、发电机组、发电机组、热电联产、热电联产厂、热电联产 MWM 是高效、环保的热电联产发电厂市场领域的世界领先品牌之一,该发电厂用于利用热电联产 (CHP)进行分散式发电。这家总部位于曼海姆的公司由卡尔·奔驰 (Carl Benz) 于 1871 年创立,以卡特彼勒能源解决方案 (Caterpillar Energy Solutions) 名义运营,回顾其 MWM 品牌,在开发和优

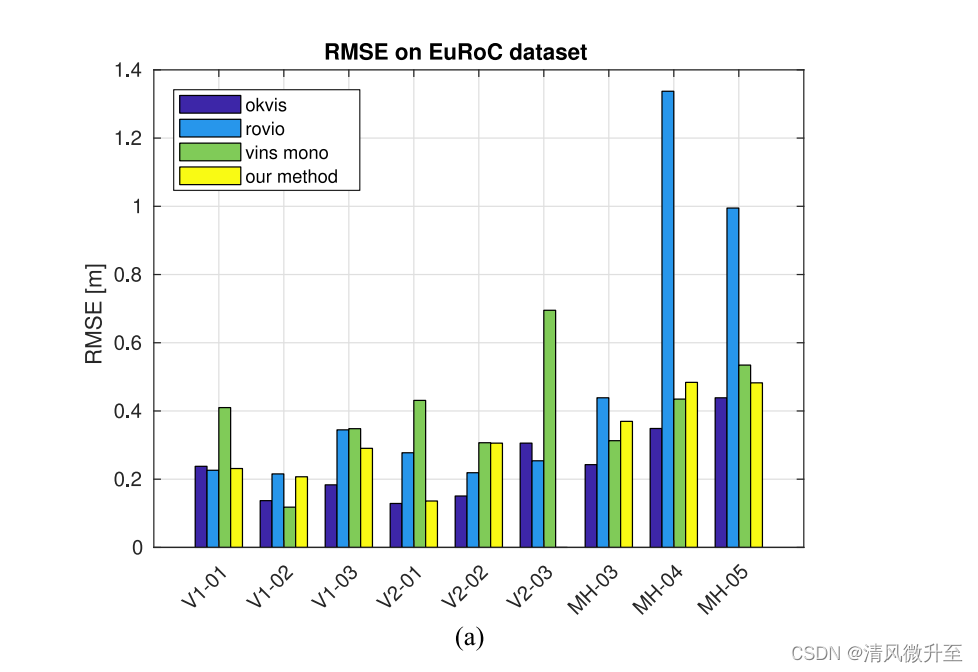
VINS-fusion 跑通Euroc、TUM、KITTI数据集,以及评估工具EVO的下载和使用
零、EVO工具获取与使用 ubuntu20.04中python版本是3.x,因此对应的pip工具会变成pip3,可以先参考如下链接查看自己系统的python和pip版本。 Ubuntu20.04安装evo(详细教程)【亲测有效】_ubantu20.04 evo_学无止境的小龟的博客-CSDN博客 再调用如下命令对evo工具进行安装 pip3 install evo --upgrade --

多维时序 | Matlab实现EVO-TCN-Multihead-Attention能量谷算法优化时间卷积网络结合多头注意力机制多变量时间序列预测
多维时序 | Matlab实现EVO-TCN-Multihead-Attention能量谷算法优化时间卷积网络结合多头注意力机制多变量时间序列预测 目录 多维时序 | Matlab实现EVO-TCN-Multihead-Attention能量谷算法优化时间卷积网络结合多头注意力机制多变量时间序列预测效果一览基本介绍程序设计参考资料 效果一览 基本介绍 1.
evo同时对比多个tum数据集
1.用法 1)将evoCapsulation.sh置于RGBD数据集所在的文件夹 2)运行以下命令 ./evoEncapsulation.sh fr2_desk_ORB.txt fr2_desk_ORB_kf_mono.txt fr2groundtruth.txt 2 shell文件 #!/bin/bash#判断输入参数的个数if [ $# -eq 0 ];then echo "

python2 安装evo 与 评价MSKCF 等slam系统
参考https://blog.csdn.net/weixin_44386661/article/details/103080551 https://blog.csdn.net/zhiwei121/article/details/105013678 这里用源码安装 #git clone https://github.com/MichaelGrupp/evo.gitcd evo# 安装在系
msckf-vio 跑Euroc数据集,并用evo进行评估
所需材料: Euroc数据集主页:https://projects.asl.ethz.ch/datasets/doku.php?id=kmavvisualinertialdatasetsevo评估工具代码:https://github.com/MichaelGrupp/evo向msckf-vio中添加保存位姿的代码,可参考https://blog.csdn.net/xiaoxiaoyikesu/

HTC EVO 3D G17 S-OFF与卡刷ROM图文教程
注意事项: 1. 本刷机教程需在windows操作系统下进行 2. 刷机前确保手机电量不少于50% 3. 为避免资料丢失,刷机前请先备份个人资料 资料备份恢复: 1. 使用手机自带备份功能 2. 完整备份请使用豌豆荚等PC端工具 大家也可以使用“深度刷机”进行其他刷机操作,类似root、recovery、刷ROM,全部都一键完成,简单易操作。 第一步:下载 1.下载R

HTC EVO 3D G17解锁s-off刷机图文教程
HTC EVO 3D刷Recovery、刷ROM的之前需要解锁,将HTC G17 S-on变成s-off后才能完成刷机,那怎么让HTC EVO 3D解锁呢,下面是HTC EVO 3D解锁图文教程,供大家参考。 1、下载安装HTC EVO 3D ADB驱动,然后打开解锁网站:http://revolutionary.io/,目的是下载工具及获取KEY,下拉至如图:

HTC EVO 3D(G17) ROOT权限获取教程 很简单
HTC EVO 3D(G17)如何 ROOT?怎么ROOT?下面是HTC EVO 3D(G17) ROOT权限获取教程 刷机工具下载 http://www.zhuquewl.com/prdct_sjds.html ROM包下载 http://www.zhuquewl.com。 1、下载QQ手机管家PC版,并安装(这个用QQ电脑管理就能直接下载,在工具箱里的软件类里找到Android管理,单击
【Vins轨迹】pose_graph位姿图加载EVO精度评定
1. Vins的位姿图加载功能 如果想要对slam运行后的位姿轨迹进行评定,需要将数据保存到output文件夹中。 其中pose_graph.txt含有的信息:关键帧id、时间戳、vio的xyz、优化后的xyz、vio的四元数、优化后的四元数、回环到的关键帧id、回环信息(8个)、特征点数量。 其中数据是和vins_no_loop.txt以及vins_loop.txt中的数据是一致的。 v

(2)(2.4) TerraRanger Tower/Tower EVO(360度)
文章目录 前言 1 安装传感器并连接 2 通过地面站进行配置 3 参数说明 前言 TeraRanger Tower 可用于在 Loiter 和 AltHold 模式下进行目标规避。传感器的最大可用距离约为 4.5m。 TeraRanger Tower EVO 可用于在 Loiter 和 AltHold 模式下进行目标规避。传感器的最大可用距离约为 60m。 !Note
(2)(2.4) TerraRanger Tower/Tower EVO(360度)
文章目录 前言 1 安装传感器并连接 2 通过地面站进行配置 3 参数说明 前言 TeraRanger Tower 可用于在 Loiter 和 AltHold 模式下进行目标规避。传感器的最大可用距离约为 4.5m。 TeraRanger Tower EVO 可用于在 Loiter 和 AltHold 模式下进行目标规避。传感器的最大可用距离约为 60m。 !Note

六种最新智能优化算法(LSO、SWO、ZOA、EVO、KOA、GRO)求解23个基准测试函数(含参考文献及MATLAB代码)
一、六种算法简介 (1)光谱优化算法LSO 光谱优化算法(Light Spectrum Optimizer,LSO)由Mohamed Abdel-Basset等人于2022年提出。 参考文献:Abdel-Basset M, Mohamed R, Sallam KM, Chakrabortty RK. Light Spectrum Optimizer: A Novel Physics-

MVG在2023全国天线会议中展示创新的SG Evo系统,在拱形环中采用MVG无限采样专利技术
天线测量解决方案领导者Microwave Vision Group(MVG)今日宣布参加2023年8月20日至23日在哈尔滨举办的全国天线会议,并参与会议同期进行的产品展览,展出其采用了MVG无限采样专利技术的多探头测试系统——SG Evo。 在由多探头测试系统进行的球形天线测量中,DUT在方位角上旋转,而设备周围的电磁场同时被多探头阵列扫描。对于大型天线和/或工作在更高频率的天线,如毫米波
![[环境]Ubuntu20.04-SLAM测评工具-evo安装](https://img-blog.csdnimg.cn/1a657a57a1f24331b5bd7d4b14c3589b.png)
[环境]Ubuntu20.04-SLAM测评工具-evo安装
参考链接 CSDN上的安装方案 安装过程中,仅出现一个问题,就是matplotlib的版本不对 报错内容:与下图的红色字体报错的类型一致,只是我的版本跟他不一样,不过不影响解决解决办法 安装完成记录,同样是注意位置和层级安排

如何使用evo工具评估LeGO-LOAM跑KITTI数据集的结果
如何使用evo工具评估LeGO-LOAM跑KITTI数据集的结果 下载KITTI数据集安装kitti2bag修改LeGO-LOAM代码utility.himageProjection.cpptransformFusion.cpp 安装evo最终结果 下载KITTI数据集 官方链接:KITTI官网 我们只用得到点云数据集和groundtruth,也就是odometry data s