aruco专题

opencv中ArUco模块实践(1)
论文阅读模块将分享点云处理,SLAM,三维视觉,高精地图相关的文章。公众号致力于理解三维视觉领域相关内容的干货分享,欢迎各位加入我,我们一起每天一篇文章阅读,开启分享之旅,有兴趣的可联系微信dianyunpcl@163.com。 aruco标记板的检测与识别 在上一节中我们介绍了aruco单个的标记 板的检测和识别这里我们将介绍aruco标记板的检测和识别的过程。 ArUco的生成与检测 ArU

opencv中ArUco识别
姿态估计(Pose estimation)在 计算机视觉领域扮演着十分重要的角色: 机器人导航、增强现实以及其它。这一过程的基础是找到现实世界和图像投影之间的对应点。这通常是很困难的一步,因此我们常常用自己制作的或基本的Marker来让这一切变得更容易。 最为流行的一个途径是基于二进制平方的标记。这种Marker的主要便利之处在于,一个Marker提供了足够多的对应(四个角

SLAM学习——使用ARUCO_marker进行AR投影
一、简介 1.1 目标 增强现实技术(Augmented Reality,简称 AR),是一种实时地计算摄影机影像的位置及角度并加上相应图像、视频、3D模型的技术,这种技术的目标是在屏幕上把虚拟世界套在现实世界并进行互动。 将三维模型投影到ARUCO marker上,并获取投影效果。 1.2 实现思路 制作并识别ARUCO marker估计旋转矩阵和平移矩阵获取模型数据,并根据需要
ArUco与OpenCV
目录 生成标记 检测标记 完整代码 一些链接 代码片段记录 创建Aruco的Board板 检测Board板 ArUco标记可以用于增强现实、相机姿势估计和相机校准等应用场景,具体如无人机的自主降落地标、机器人定位。标记中白色部分为唯一标识的二进制编码。 生成标记 通过为每个码生成唯一标记,可以获取到更丰富的信息。在Open

ros aruco marker
参考链接: 1. aruco ros 2. aruco github 首先要有图片源,可用一个简单的uvc摄像头,这里选择uvc图片源。 rosrun uvc_camera uvc_camera_node 需要注意的是,图片是需要经过校准的,即在默认路径下有默认文件。 ~/.ros/camera_info/camera.yaml 校准过程的参考链接: camera calibrati


ArUco----一个微型现实增强库的介绍及视觉应用(二)
很重要的一点就是这个 转载自:https://www.cnblogs.com/shawn0102/p/8039439.html ArUco----一个微型现实增强库的介绍及视觉应用(二) ArUco----一个微型现实增强库的介绍及视觉应用(二) 一、第一个ArUco的视觉应用 首先介绍第一个视觉应用的Demo,这个应用场景比较简单,下面具体介绍: 1. 应用场景 主线
ArUco----一个微型现实增强库的介绍及视觉应用(一)
原来ARUCO就是一个增强现实库,怪不得有人用它做AR https://blog.csdn.net/sinat_16643223/article/details/114261925 转载自:https://www.cnblogs.com/shawn0102/p/7911735.html ArUco----一个微型现实增强库的介绍及视觉应用(一) ArUco----一个微型现实增强库的
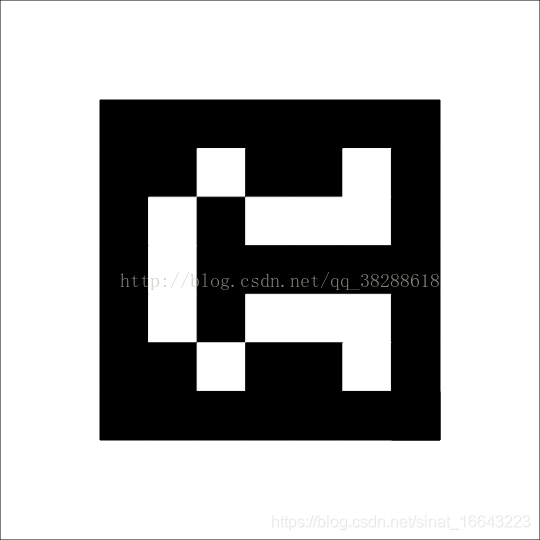
ARUCO marker的解释(ARUCO二维码的含义说明)
转载自:https://blog.csdn.net/qq_38288618/article/details/78241456?utm_medium=distribute.pc_relevant_t0.none-task-blog-BlogCommendFromMachineLearnPai2-1.control&dist_request_id=f3cf405d-3f2e-482f-bde8-177

使用opencv的aruco库进行位姿估计(得到的是旋转矩阵与平移矩阵)
这里面很重要的一点就是说了:使用estimatePoseSingleMarkers估计Marker的位姿,得到的即是即是R和t,R和t应该就是旋转矩阵与平移矩阵。 https://blog.csdn.net/sinat_16643223/article/details/112912961 https://blog.csdn.net/sinat_16643223/article/detail
使用opencv的aruco库进行位姿估计(得到的是旋转矩阵与平移矩阵)
这里面很重要的一点就是说了:使用estimatePoseSingleMarkers估计Marker的位姿,得到的即是即是R和t,R和t应该就是旋转矩阵与平移矩阵。 https://blog.csdn.net/sinat_16643223/article/details/112912961 https://blog.csdn.net/sinat_16643223/article/detail

视觉标记定位aruco使用
转载自:https://lightsail.blog.csdn.net/article/details/102752780 视觉标记定位aruco使用 沧海飞帆 2019-10-26 11:05:51 2657 收藏 14 分类专栏: SLAM 文章标签: opencv aruco定位 版权声明:本文为博主原创文章,遵循 CC 4.0 BY-SA 版权协议,转载请附上原文出处链接和本声
视觉标记定位aruco使用
转载自:https://lightsail.blog.csdn.net/article/details/102752780 视觉标记定位aruco使用 沧海飞帆 2019-10-26 11:05:51 2657 收藏 14 分类专栏: SLAM 文章标签: opencv aruco定位 版权声明:本文为博主原创文章,遵循 CC 4.0 BY-SA 版权协议,转载请附上原文出处链接和本声

aruco_calibration相机标定(ARUCO二维码是可以用来进行相机标定的)
转载自:https://blog.csdn.net/weixin_44419695/article/details/88779460

python下使用aruco标记进进行三维姿势估计(转载)
转载自:https://www.it610.com/article/1291934151255072768.htm python下使用aruco标记进进行三维姿势估计 视觉机器人 python3 aruco python opencv 计算机视觉 aruco ArUco标记 首先什么是aruco标记呢? aruco标记是可用于摄像机姿态估计的二进制方形基准标记。它的主要优点是检

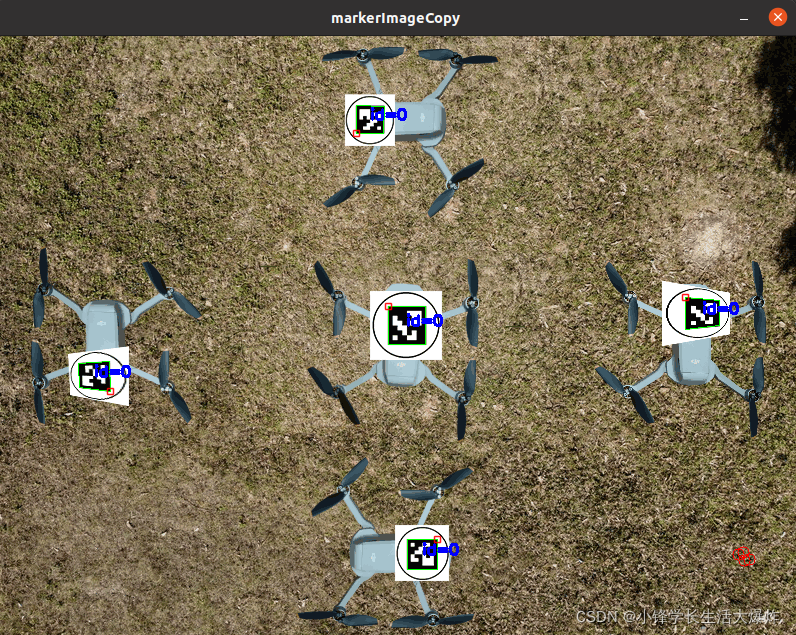
Gazebo仿真环境下对二维码aruco的检测
Gazebo仿真环境下对二维码aruco的检测 结果演示环境配置acuro码准备建立面墙移动墙文件位置并修改墙文件materials文件下修改 总结 结果演示 这边先放上结果吧,如下图所示,在仿真环境下打开了realsense d435相机,并且成功检测到了aruco码。通过rostopic echo 订阅aruco的位置信息在终端中进行打印。 环境配置 acuro码准备