本文主要是介绍RA-RISK ANALYSIS,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!

文章目录
- 一、期刊简介
- 二、征稿信息
- 三、期刊表现
- 四、投稿须知
- 五、咨询
一、期刊简介
Risk Analysis代表风险分析学会出版,在ISI期刊引文报告中的社会科学、数学方法类别中排名前10位,为风险分析领域的新发展提供了焦点。这本国际同行评审期刊致力于发表有关风险问题的批判性实证研究和评论。
二、征稿信息
| 征稿方向 | 截稿日期 |
|---|---|
| 用于风险分析的人工智能、人工智能的风险 | 2024-05-24 |
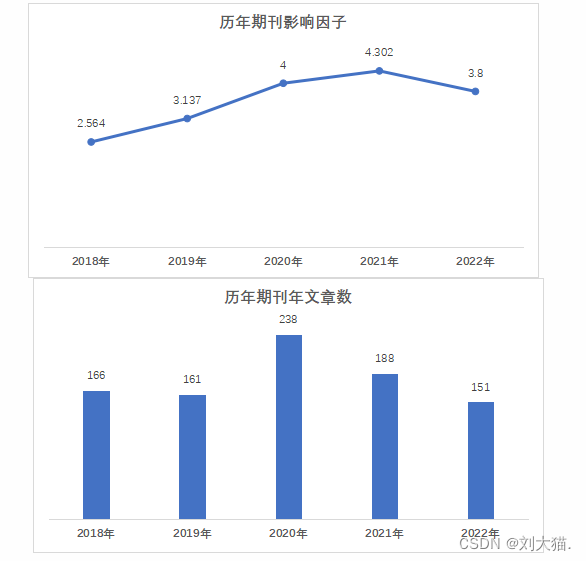
三、期刊表现
四、投稿须知
- 文章应具有原创性,具备学术或实用价值,且并未在国内外期刊或会议上公开发表过。
- 艾思科蓝提供在线投稿支持,
投稿即可获得学术编辑免费审稿报告,从文章选题、结构、语言、发表可行性等多角度进行专业评估,并给予有效的建议! - 文章正式投稿到期刊前,可享受国际权威查重工具iThenticate免费查重服务一次!
- 期刊论文最终以英文形式发表,中文稿件如需语言服务或文章个性化修改服务,请提交至艾思编译。
五、咨询

如想
“投稿”请点击如下图片 ↓

这篇关于RA-RISK ANALYSIS的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!