本文主要是介绍58. UE5 RPG AI行为树的装饰器,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
书接56. UE5 RPG 给敌人添加AI实现跟随玩家,我们实现了AI一些基础设置,并实现了获取敌人附近的玩家实现了跟随功能

接下来,我们将实现区分职业,并根据职业不同设置不同的攻击距离,并且根据职业实现不同的技能施放。
黑板装饰器
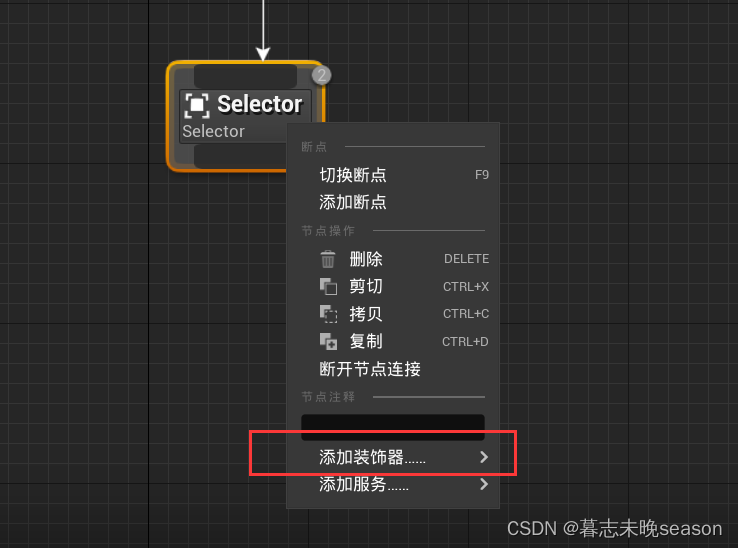
首先,我们在发现玩家下面添加一个Selector

这个Selector上面右键添加装饰器,装饰器可以理解为用于增加条件判断当前节点是否会设置为失败,如果失败了,节点下面的子项也将停止执行,运行其它分支逻辑,或者从头开始重新执行行为树。
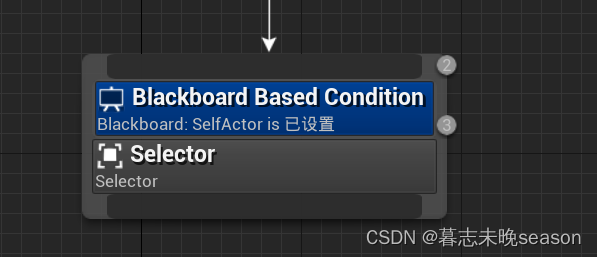
我们在节点上增加一个黑板装饰器,这个装饰器可以监听黑板上的值来执行逻辑
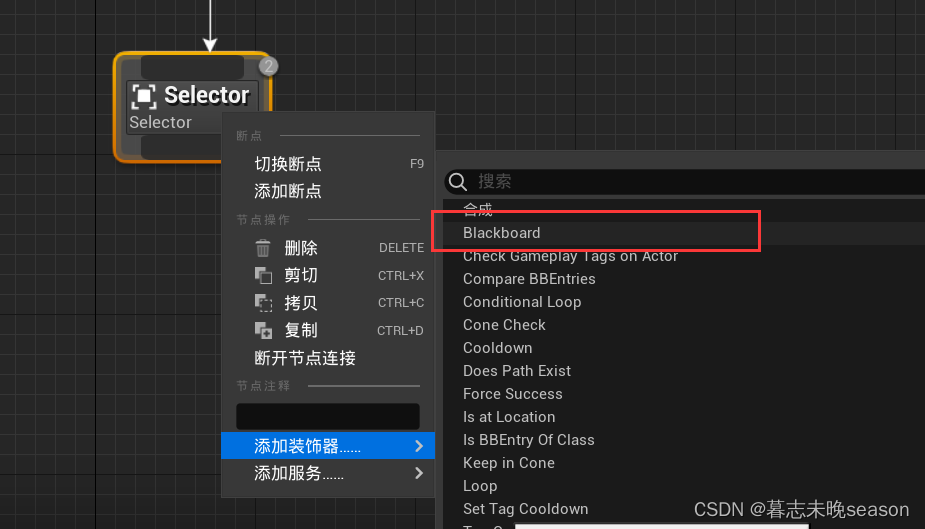
如果装饰器这一关判断通过不来,这个节点将直接被定义为失败,节点下的行为将不被调用执行
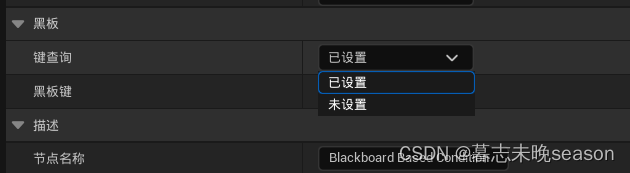
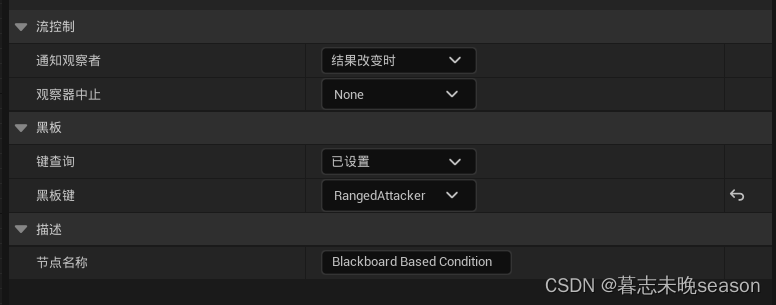
在右侧属性这里,有个黑板属性,可以监听一个黑板键,键查询这里是可以通过的条件

这里如果是已设置,那么如果黑板键被设置了值才能够运行节点下面的节点,相反,如果设置的未设置,在这个黑板键被设置值以后,是无法执行此节点下面的后续节点。
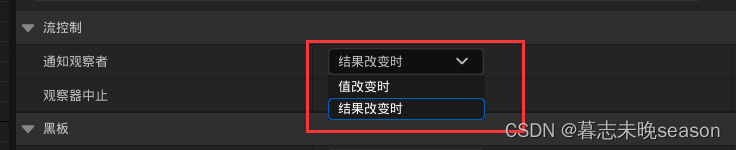
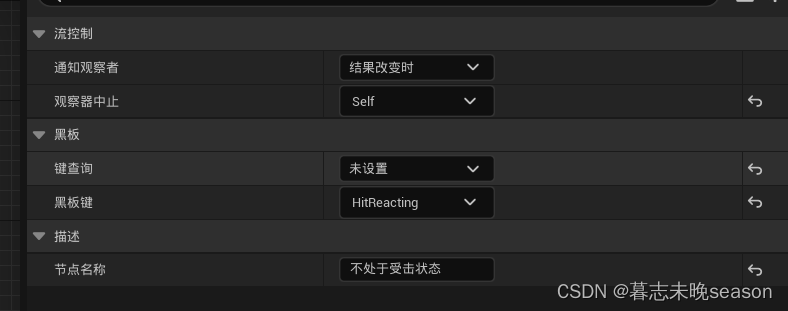
接下来是流控制这里的通知观察者,这个值的设置用于在值在如何改变时,观察者会中止某些流程。观察者相当于整个行为树的流程控制者,用于控制行为树如何运行。
这两个值的设置有什么区别呢?经过测试发现
- 值改变时,观察者将在黑板的键的值改变时通知观察者
- 结果改变时,是在装饰器所在的节点结果发生变化(从成功变为失败,从失败变为成功)时通知观察者
上面讲到了观察者中止,那么如何中止呢,我们可以通过配置观察器中止来实现,下面并列出来每个可以设置的值。
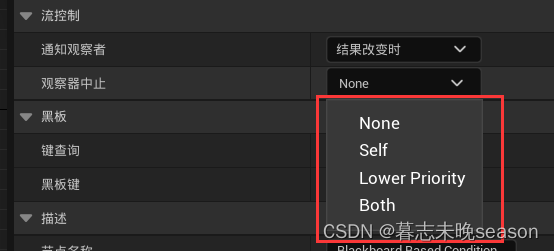
这四个值将会设置需要在中止时中止那些运行的行为: - None 是不会中止
- Self:如果设置了Self,观察者将会中止掉此行为节点的所有正在运行的行为,并将自身返回失败。
- Low Priority:如果通知中断,中断所有低优先级的执行中节点。在行为树中,节点通常具有优先级或执行顺序,这种类型的中断将影响所有优先级低于触发中断的节点的执行中节点。
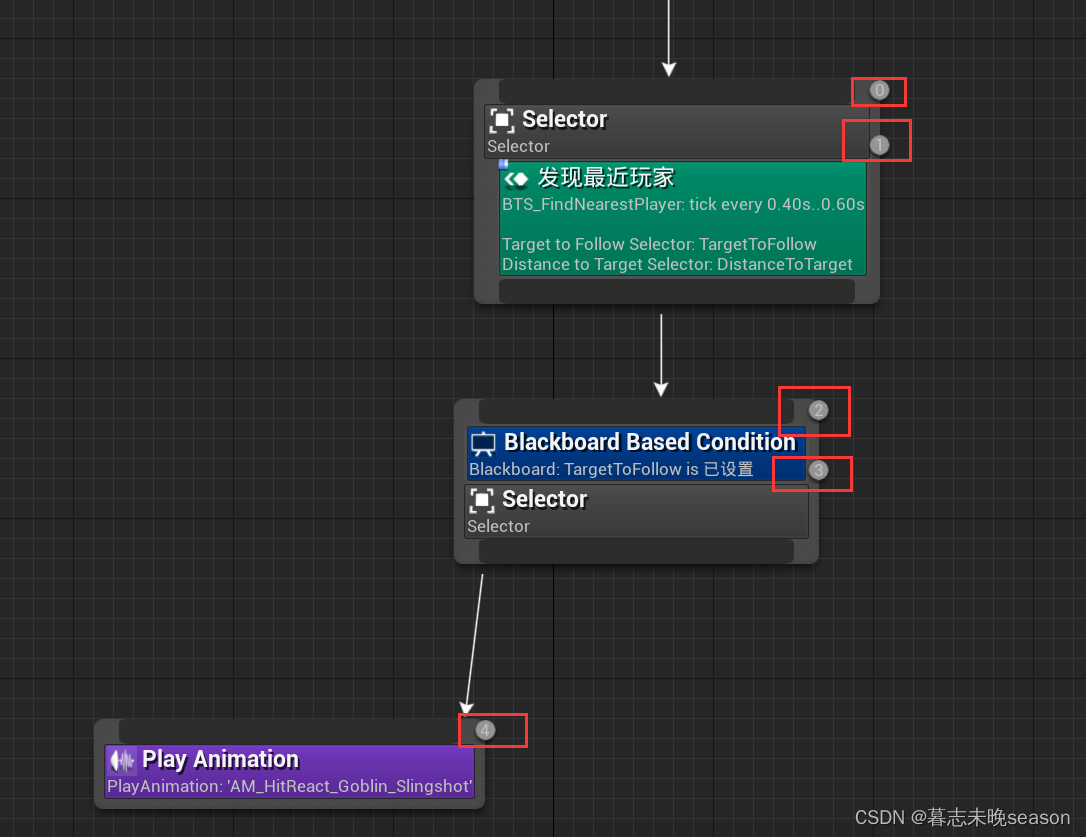
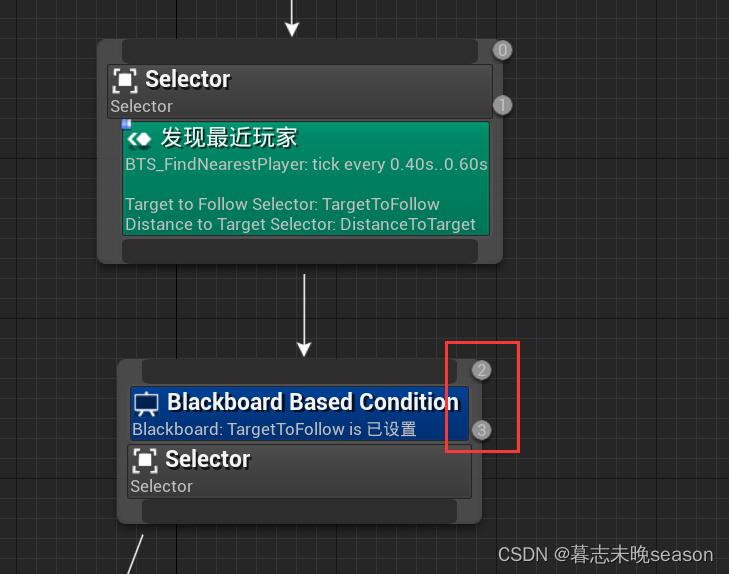
在下图中,我们可以看到行为树的执行顺序,低优先级,就是比它的数值大的那些行为节点。
- Both: 如果通知中断,中断所有低优先级的执行中节点,包括当前子树中的节点。这实际上是“Self”和“Low Priority”的结合,既中断当前子树中的节点,也中断其他所有低优先级的节点。
这也是我们为什么不把装饰器放到前面的那个行为节点上的原因,你看执行顺序就会发现,装饰器的执行优先级比Selector要高,如果和发现最近玩家设置到一块,那么如果装饰器不通过,AI就无法运行查找最近玩家的服务。
增加角色状态的判断
我们要执行移动或者攻击时,还要判断当前角色是否处于受击状态,所以,我们在黑板里增加一个布尔键,用于设置当前是否处于受击状态
然后,我们在敌人基类里面,对其值进行初始化,从AIController里面获取到黑板控件,然后调用函数设置即可。
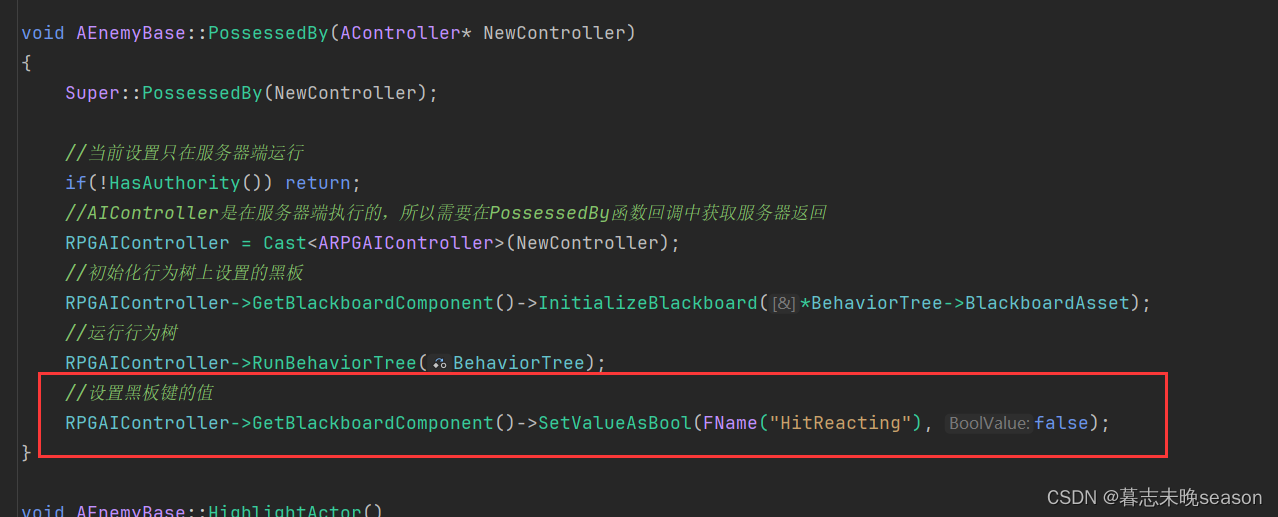
接下来就是设置它的动态值,我们之前实现了受击时将敌人的速度设置为0,刚好在那里,我们还是使用同样的方法设置其受击布尔值
void AEnemyBase::HitReactTagChanged(const FGameplayTag CallbackTag, int32 NewCount)
{bHitReacting = NewCount > 0;GetCharacterMovement()->MaxWalkSpeed = bHitReacting ? 0.f : BaseWalkSpeed;//设置黑板键的值RPGAIController->GetBlackboardComponent()->SetValueAsBool(FName("HitReacting"), bHitReacting);
}
我们可以在节点上面增加多个装饰器,所以,我们再增加一个判断当前是否处于受击状态的黑板键
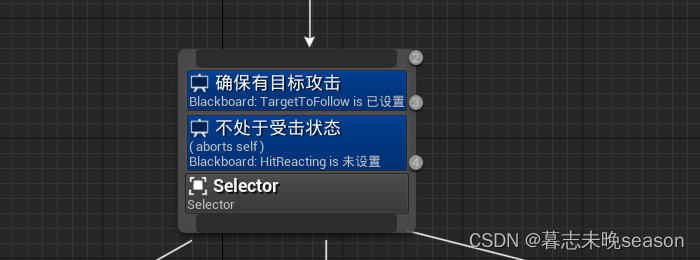
这个黑板键监听当前角色是否处于受击状态,由于使用的是布尔值,通知观察者这里值和结果改变效果是一样的,在通知观察者中止行为是,我们选择中止自身下面的子行为节点。
然后,我们在它下面创建三个子行为节点,用于不同的需求
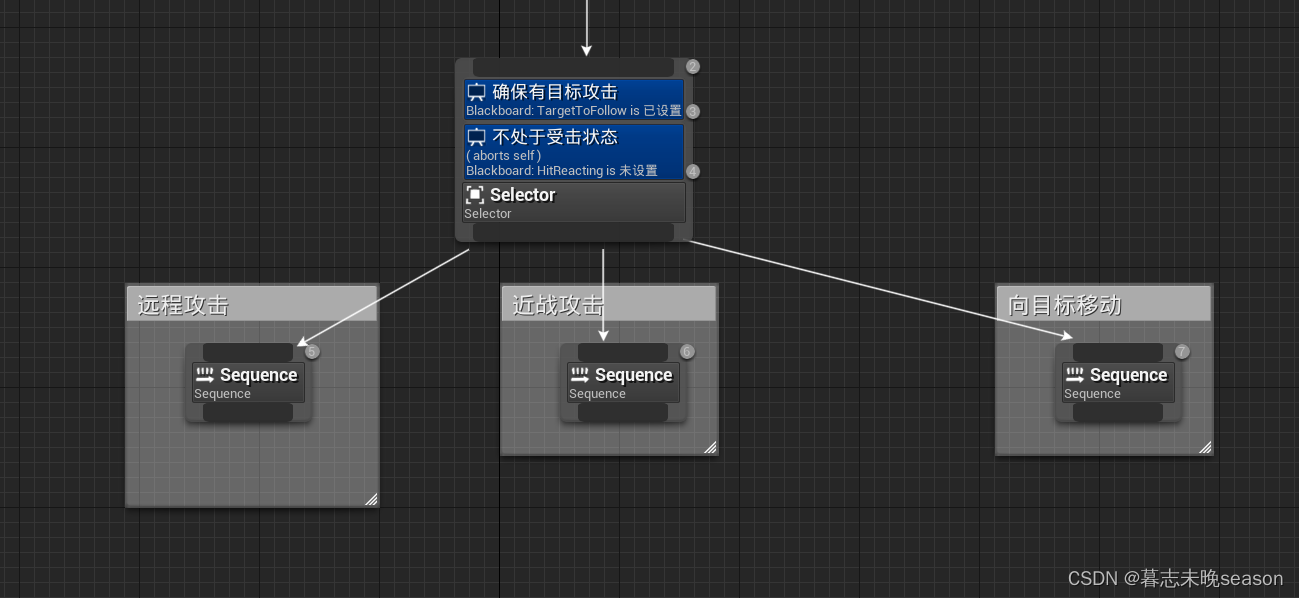
实现根据职业切换行为节点
由于不同的职业的攻击距离不同,所以,我们这里将区分了远程攻击和近战攻击。如果攻击距离不够时,我们还可以切换到向目标移动行为节点,来实现对目标的移动。
所以,我们再增加一个黑板键,用于记录当前的角色是近战攻击还是远程攻击
我们增加一个RangedAttacker的布尔键,如果角色是近战攻击,我们将其设置为false,如果是法师或者游侠职业,我们将其设置为true。
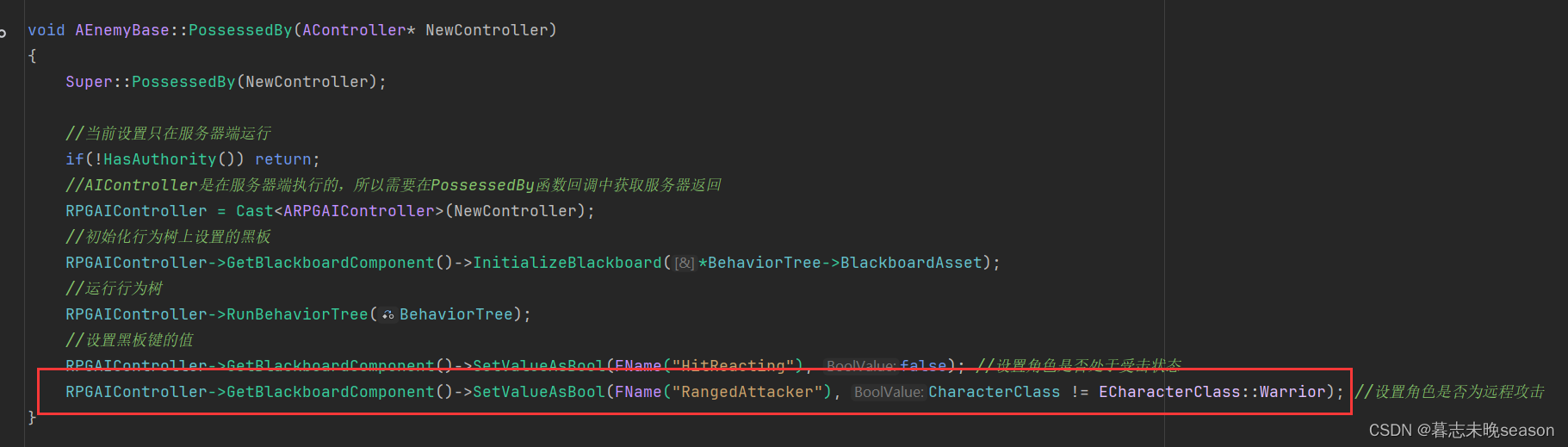
接着在敌人基类PossessedBy函数中,设置它的值。
接下来,我们在下面创建三个Sequence,Sequence不同于Selector,它会执行所有的子行为,在有一个子行为失败时返回失败。
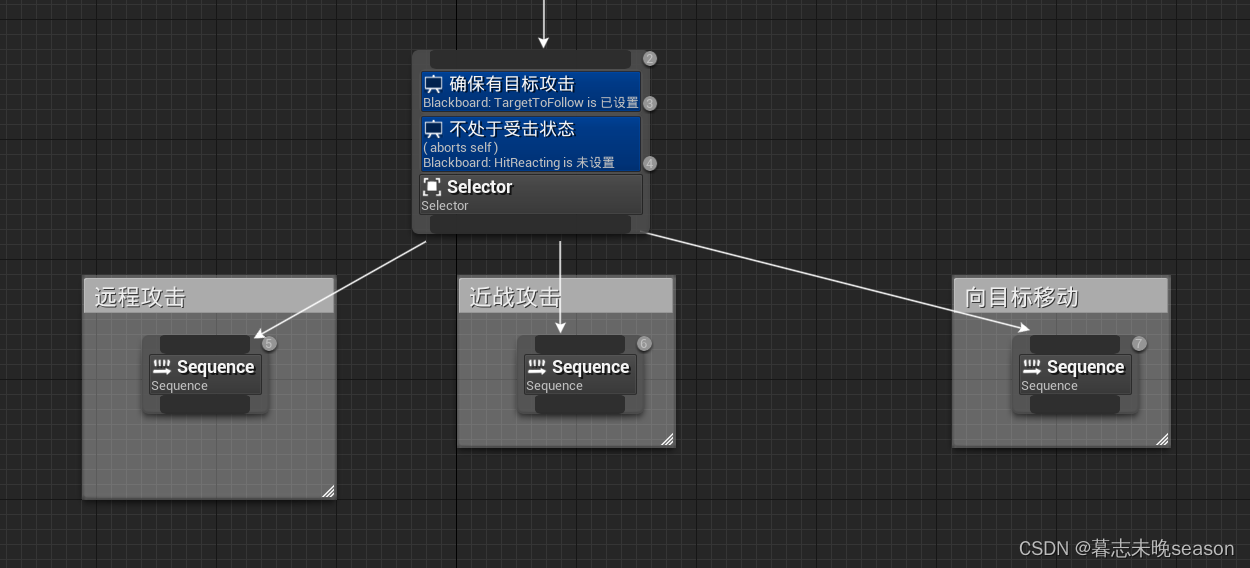
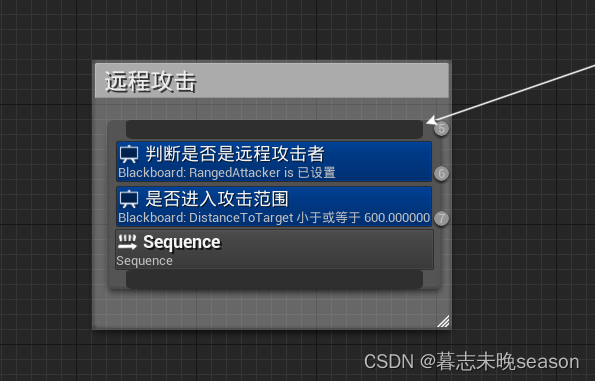
我们在远程攻击行为节点上增加一个装饰器

这个装饰器用于判断当前角色是否为远程攻击者,如果是在战士身上执行此ai行为树,这里将直接返回false,不会运行后续的子行为
我们只需要在设置这里对RangedAttacker的键检查是否已设置即可。
接着增加一个修饰器,判断攻击范围,并修改一下节点名称,方便我们查看
然后我们在近战攻击这里增加一个黑板装饰器,用于判断是否达到的近战的攻击距离

这里选择查看黑板键(与目标的距离),如果小于等于500cm,则能够执行子行为,否则,将执行后续同级别行为。

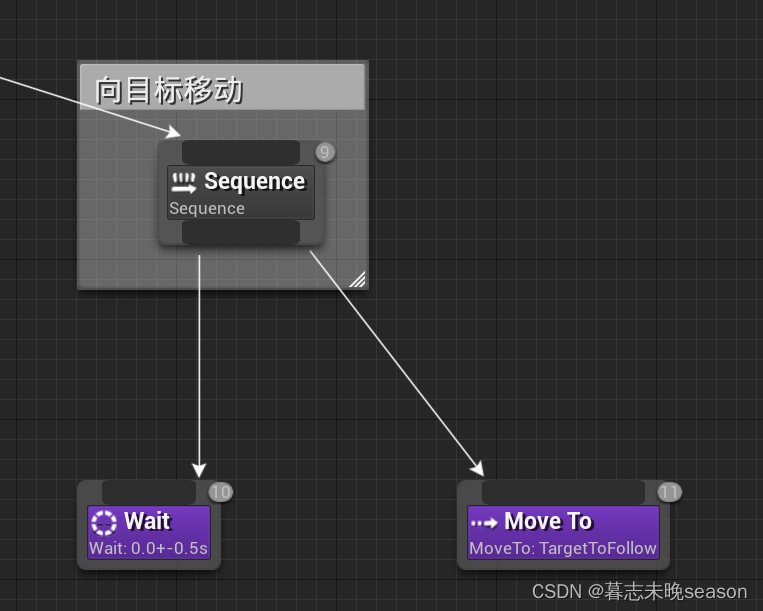
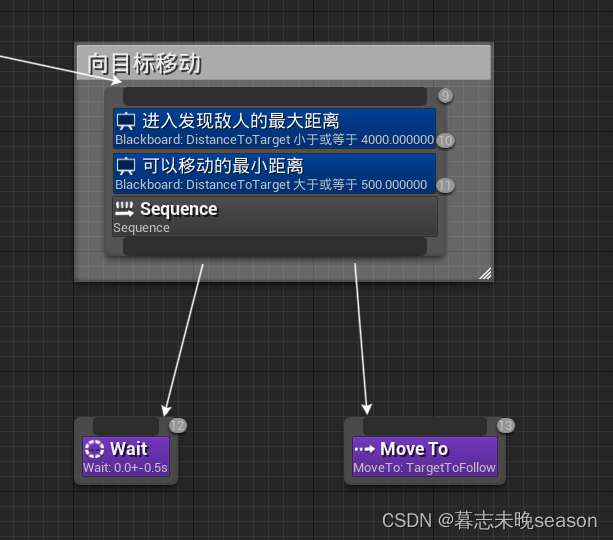
最后,我们在移动行为节点中,设置一个随机等待时间和使用一个移动节点,移动目标就是需要攻击的目标
接着我们在行为节点上加上修饰器,用来限制它的子行为可以运行的范围。
这篇关于58. UE5 RPG AI行为树的装饰器的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!







