本文主要是介绍【虚拟仿真】Unity3D中实现对大疆无人机遥控器手柄按键响应,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
推荐阅读
- CSDN主页
- GitHub开源地址
- Unity3D插件分享
- 简书地址
- QQ群:398291828
大家好,我是佛系工程师☆恬静的小魔龙☆,不定时更新Unity开发技巧,觉得有用记得一键三连哦。
一、前言
最近项目中需要用到大疆无人机遥控器对程序中无人机进行控制,遥控器是下图这一款:

博主发现接入手柄这块的可以参考的内容非常少,对于大疆遥控器的控制更是没有。
博主经过一番研究,终于理通了这块的遥控器摇杆数据的控制。
并且将解决思路分享出来,希望对大家有所帮助。
二、尝试解决思路
这一小节,先分享尝试的思路。
一是可以让同学们可以学习一下解决问题的思路,二是想让还在尝试这些方案的同学有一些参考。
下面,分享不同的解决的解决思路,心急的小伙伴可以直接跳转到第三章。
2-1、尝试使用Unity的Input Manager
尝试思路:既然遥控器也是手柄,手柄上的摇杆值应该跟Unity的Input中的摇杆值对应,遂尝试使用Input Manager。
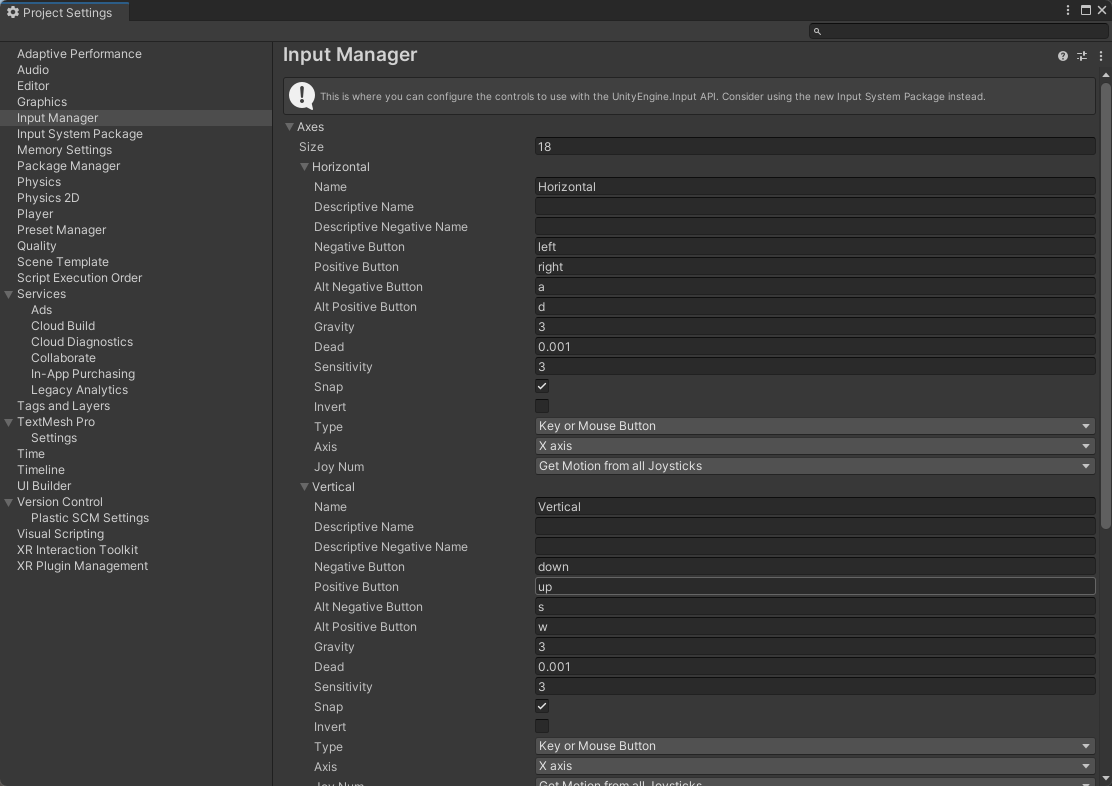
刚开始当然是直接粗暴,直接用Unity自带的Input Manager,然后用Horizontal和Vertical的值来控制物体。
写了一段代码测试:
using System.Collections;
using System.Collections.Generic;
using UnityEngine;public class PlayerMove : MonoBehaviour
{private CharacterController characterController;public float walkspeed = 10f;//行走速度public float speed;public Vector3 moveDirction;private void Start(){characterController = GetComponent<CharacterController>();}private void Update(){Move();}public void Move(){float h = Input.GetAxis("Horizontal");float v = Input.GetAxis("Vertical");moveDirction = (transform.right * h + transform.forward * v).normalized;//设置玩家移动方向characterController.Move(moveDirction * speed * Time.deltaTime);//移动}
}
运行结果:

问题:就我手柄都没动,但是一直在莫名其妙移动,看了一下输入的轴的值也是乱的:
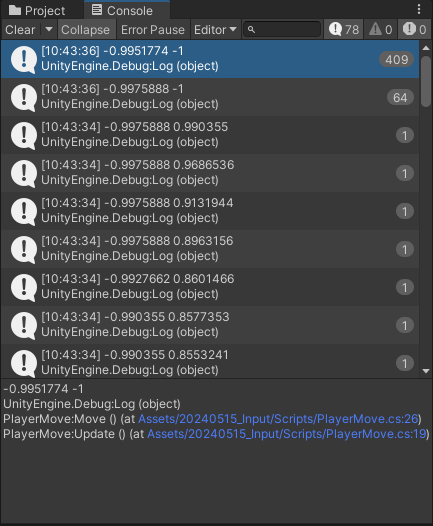
都没动,值都是(-1,-1)。
2-2、尝试使用新版输入系统ToolKit
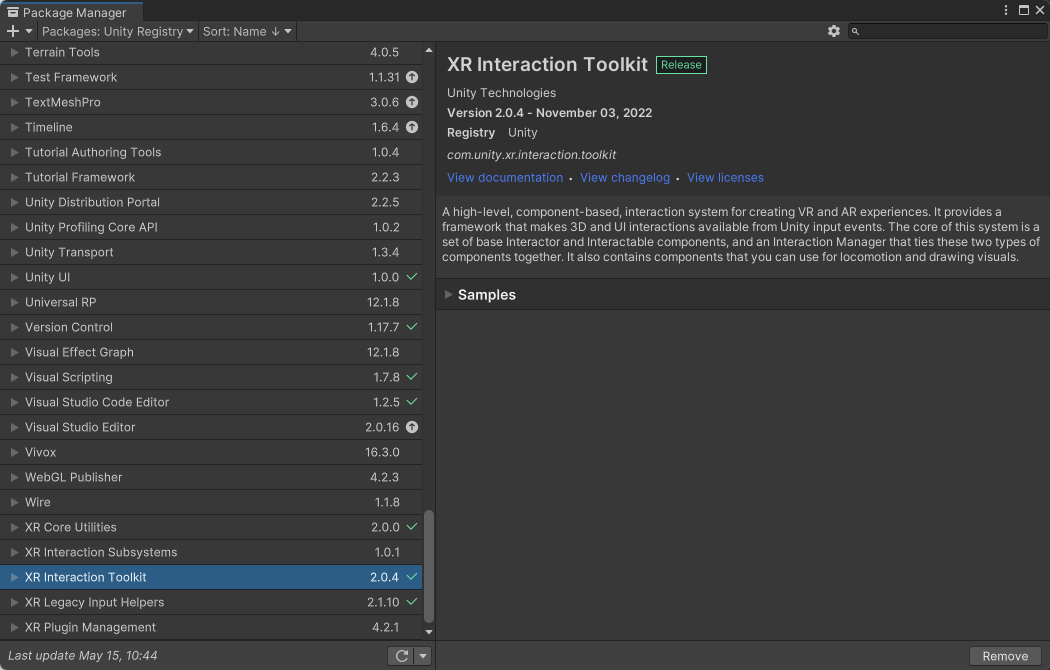
Input Manager尝试无果,所以使用了新版的输入系统XR Interaction Tookit进行控制。

首先,选择Window→Analysis→Input Debugger打开输入调试器:
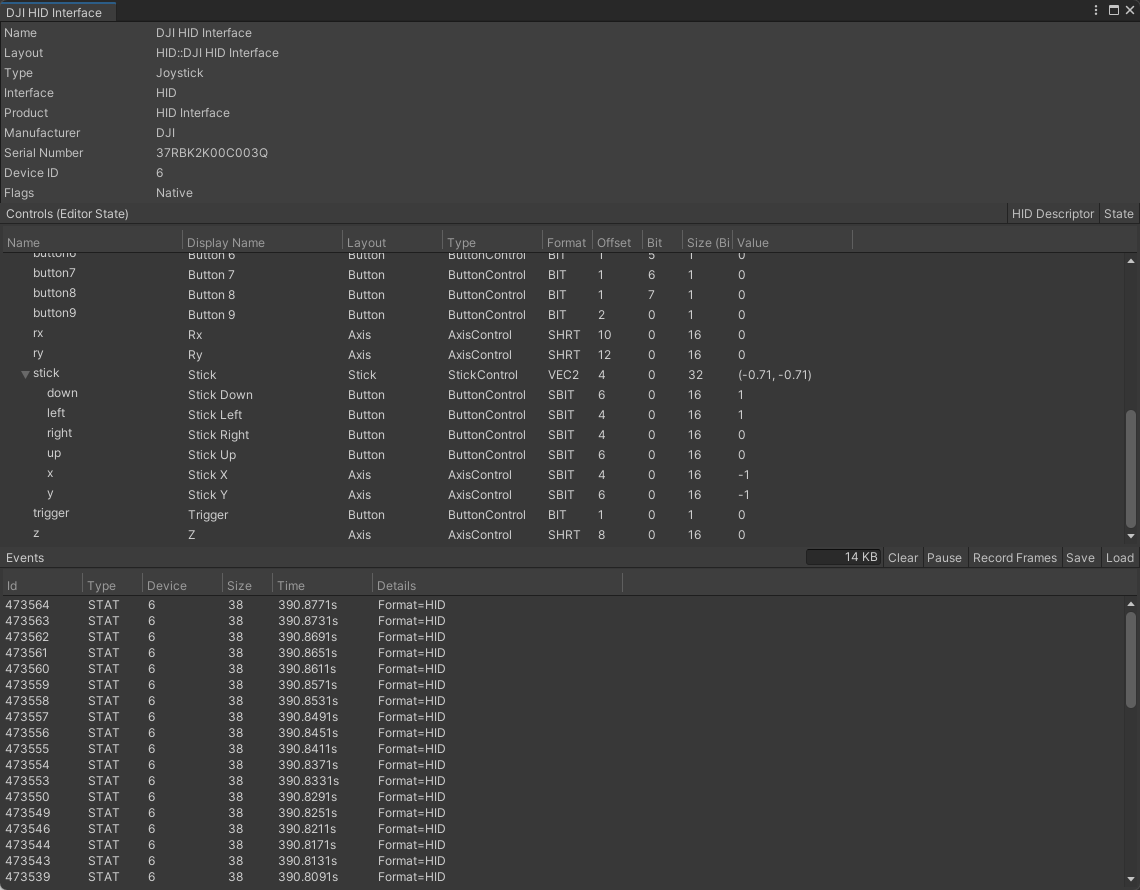
可以观察到手柄的输入的值,就可以设置输入管理器,来获取这些
这篇关于【虚拟仿真】Unity3D中实现对大疆无人机遥控器手柄按键响应的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!


