本文主要是介绍YOLOv8-pose针对视频实时提取打印对应关节点序号及坐标,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
因为我在找如何提取YOLOv8-pose的关键点的时候,大多都是针对静态图像,视频直接套用不太行,因此就改进了一下,如下:
初步代码:
import torch # 导入PyTorch库
import cv2 as cv # 导入OpenCV库并重命名为cv
import numpy as np # 导入NumPy库并重命名为np
from ultralytics.data.augment import LetterBox # 从ultralytics.data.augment中导入LetterBox类
from ultralytics.utils import ops # 从ultralytics.utils中导入ops模块
from ultralytics.engine.results import Results # 从ultralytics.engine.results中导入Results类
import copy # 导入copy模块# 视频路径
video_path = 'D:/cs/yolov8_2/ultralytics/ceshi1.mp4' # 将此处路径改为你的视频文件路径
device = 'cuda:0' # 设备类型,此处使用CUDA
conf = 0.25 # 置信度阈值
iou = 0.7 # IoU(交并比)阈值# 加载视频
cap = cv.VideoCapture(video_path)# 检查视频是否成功打开
if not cap.isOpened():print("Error: Could not open video.") # 打印错误消息exit() # 退出程序# 加载模型
ckpt = torch.load('yolov8n-pose.pt', map_location='cpu') # 加载模型参数
model = ckpt['model'].to(device).float() # 将模型加载到指定设备(CPU或GPU)并转换为浮点数类型
model.eval() # 将模型设置为评估模式results = [] # 存储结果的列表while True:ret, frame = cap.read() # 读取视频帧# 如果没有读取到帧或者视频结束,则退出循环if not ret:breakorig_img = frame # 原始图像# 预处理im = [orig_img] # 图像列表im = [LetterBox([640, 640], auto=True, stride=32)(image=x) for x in im] # 对图像进行LetterBox缩放im = im[0][None] # 转换为数组形式im = im[..., ::-1].transpose((0, 3, 1, 2)) # BGR转RGB,BHWC转BCHWim = np.ascontiguousarray(im) # 转换为连续的内存布局im = torch.from_numpy(im) # 将数组转换为PyTorch张量img = im.to(device) # 将张量移动到指定设备img = img.float() # 转换为浮点数类型img /= 255 # 归一化# 推理preds = model(img) # 模型推理prediction = ops.non_max_suppression(preds, conf, iou, agnostic=False, max_det=300, classes=None, nc=len(model.names)) # 非最大抑制得到预测结果for i, pred in enumerate(prediction):shape = orig_img.shape # 图像形状pred[:, :4] = ops.scale_boxes(img.shape[2:], pred[:, :4], shape).round() # 缩放边界框坐标pred_kpts = pred[:, 6:].view(len(pred), *model.kpt_shape) if len(pred) else pred[:, 6:] # 获取关键点坐标pred_kpts = ops.scale_coords(img.shape[2:], pred_kpts, shape) # 缩放关键点坐标results.append(Results(orig_img=orig_img, # 原始图像path=video_path, # 视频路径names=model.names, # 类别名称boxes=pred[:, :6], # 边界框keypoints=pred_kpts)) # 关键点# 获取关键点坐标及其对应的序号for j, kpts in enumerate(pred_kpts):keypoints = kpts.cpu().numpy() # 将关键点转换为NumPy数组# keypoints 包含了所有关键点的坐标,每一行是一个关键点的坐标# 根据模型的结构,关键点序号可能是从0到N-1,N是关键点的总数# 您可以在这里使用 keypoints 获取关键点的坐标和对应的序号for k, keypoint in enumerate(keypoints):x, y = keypoint[:2] # 关键点的坐标keypoint_index = k # 关键点的序号# 这里可以对每个关键点的坐标和序号执行您需要的操作print("关键点序号:", keypoint_index, "关键点坐标:", (x, y))# 显示帧plot_args = {'line_width': None, 'boxes': True, 'conf': True, 'labels': True} # 绘图参数plot_args['im_gpu'] = img[0] # 图像张量plotted_img = results[-1].plot(**plot_args) # 显示处理后的最后一帧结果cv.imshow('plotted_img', plotted_img) # 显示图像# 按 'q' 键退出if cv.waitKey(1) & 0xFF == ord('q'):break# 释放视频捕获并关闭所有窗口
cap.release()
cv.destroyAllWindows()
效果:
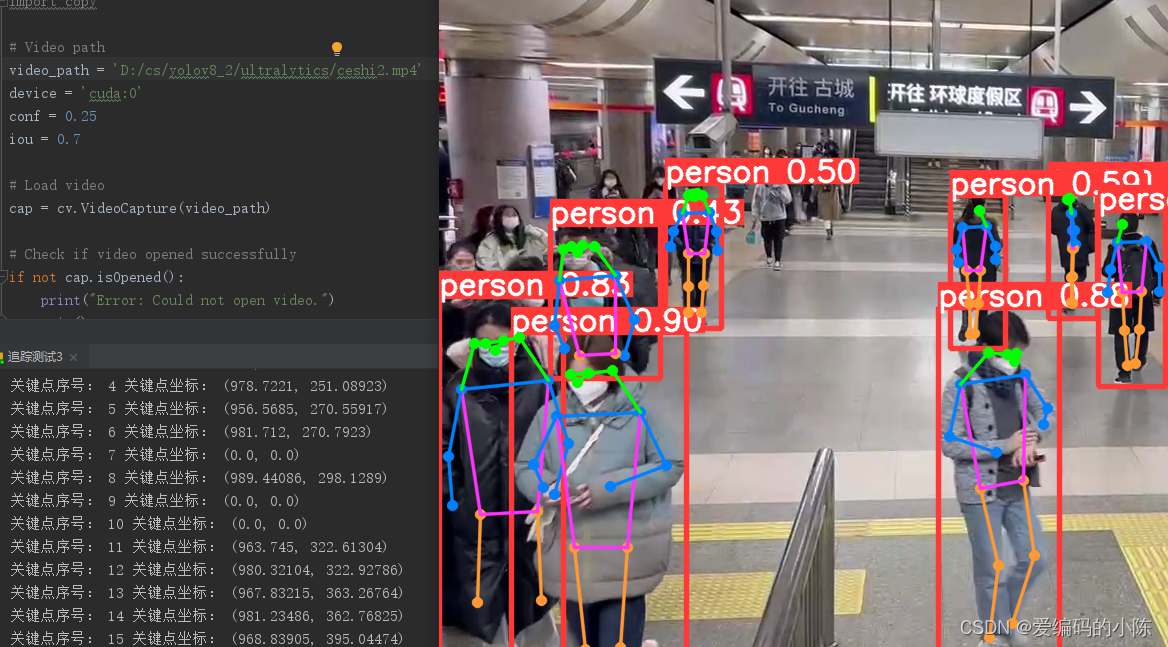
这篇关于YOLOv8-pose针对视频实时提取打印对应关节点序号及坐标的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!







