关节点专题

无向图的割点(关节点)
无向图的割点,也称关节点。对于无向图中不同的两点u,v,如果必须经过点w,才能构成一条从u到v的路径,那么称该w点就是割点(关节点)。关节点的求解只需要一次关于图的深度优先遍历(完成一次DFS等于生成一棵树,第一个访问的节点是根结点)。在这次DFS中,按照遍历的顺序记录每个点i的a,b表。其中,a表和b表的计算如下: a[i]=predfn ; //predfn是点的深度遍历访问顺序,在深
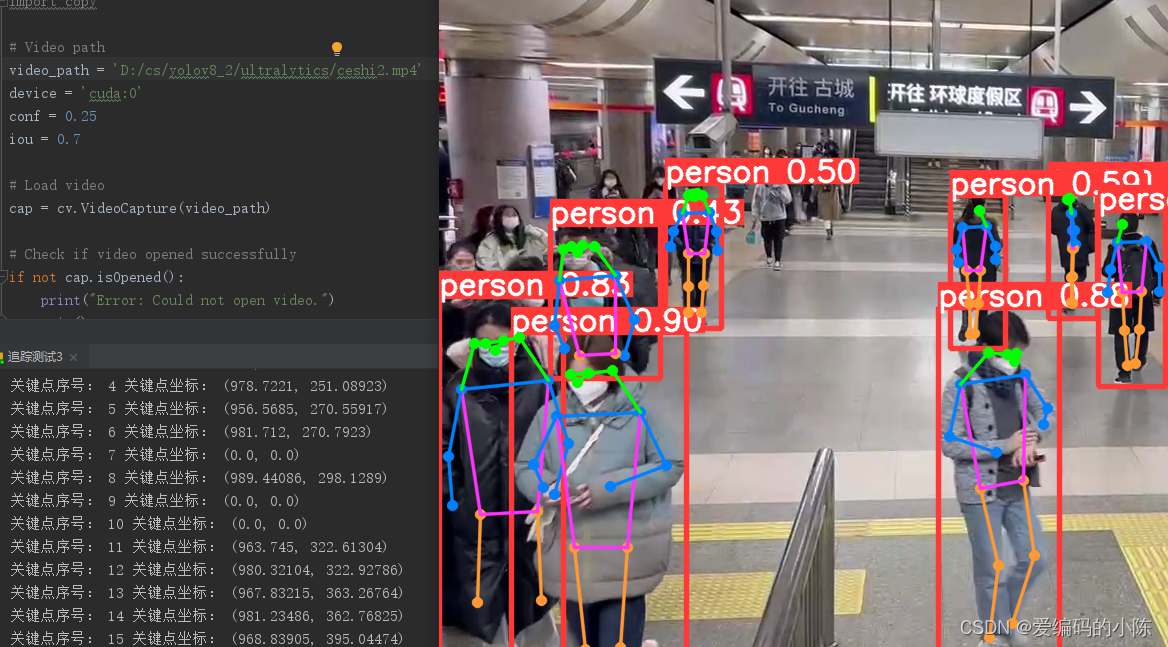
YOLOv8-pose针对视频实时提取打印对应关节点序号及坐标
因为我在找如何提取YOLOv8-pose的关键点的时候,大多都是针对静态图像,视频直接套用不太行,因此就改进了一下,如下: 初步代码: import torch # 导入PyTorch库import cv2 as cv # 导入OpenCV库并重命名为cvimport numpy as np # 导入NumPy库并重命名为npfrom ultralytics.data.augmen
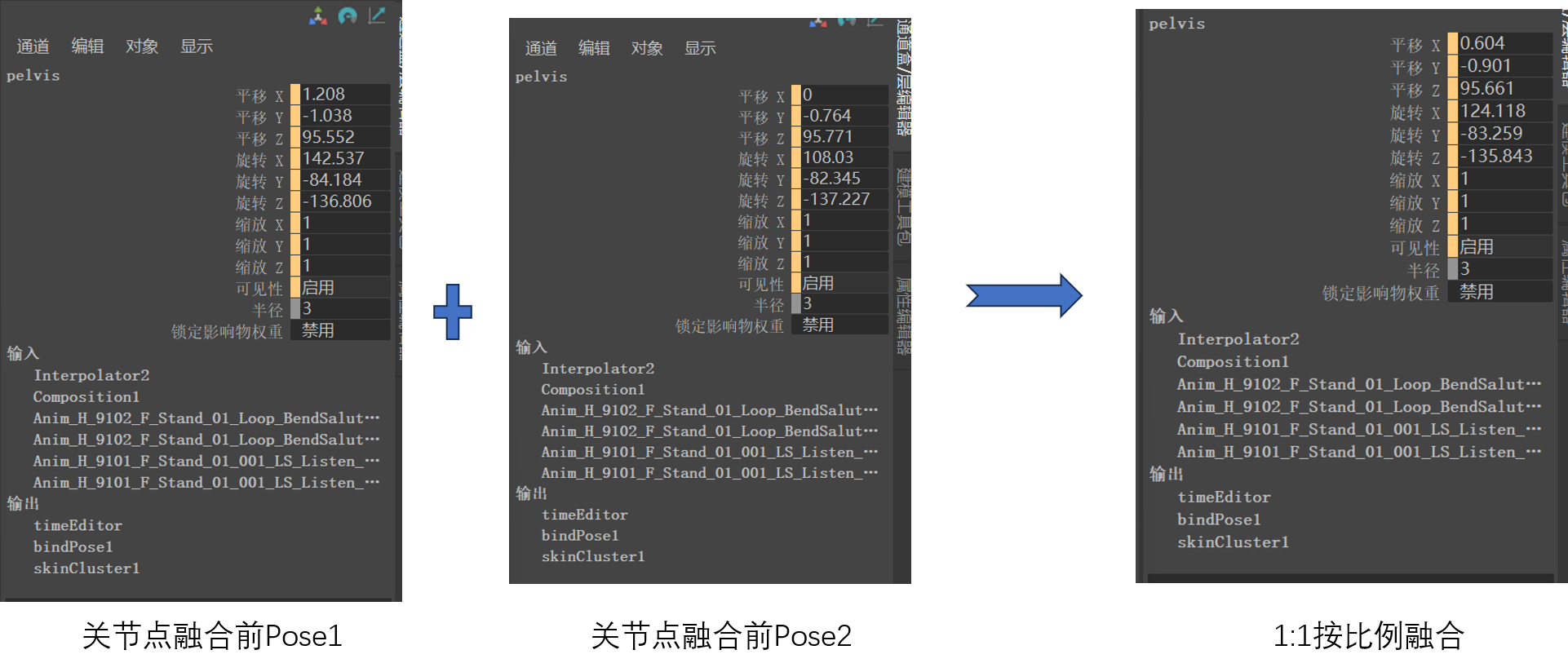
AIGC笔记--关节点6D位姿按比例融合
1--核心代码 6D位姿一般指平移向量和旋转向量,Maya软件中关节点的6D位姿指的是相对平移向量和欧拉旋转向量; 为了按比例融合两个Pose,首先需要将欧拉旋转向量转换为旋转矩阵,在将旋转矩阵转换为四元数,利用球面线性插值实现Pose的融合,融合后的四元数需要重新转换为欧拉旋转向量,整个流程如下:欧拉旋转向量→旋转矩阵→四元数→球面线性插值→旋转矩阵→欧拉旋转

yolov8的目标检测、实例分割、关节点估计的原理解析
1 YOLO时间线 这里简单列下yolo的发展时间线,对每个版本的提出有个时间概念。 2 yolov8 的简介 工程链接:https://github.com/ultralytics/ultralytics 2.1 yolov8的特点 采用了anchor free方式,去除了先验设置可能不佳带来的影响借鉴Generalized Focal Loss,使用任务解耦,分别
【yolov8系列】yolov8的目标检测、实例分割、关节点估计的原理解析
1 YOLO时间线 这里简单列下yolo的发展时间线,对每个版本的提出有个时间概念。 2 yolov8 的简介 工程链接:https://github.com/ultralytics/ultralytics 2.1 yolov8的特点 采用了anchor free方式,去除了先验设置可能不佳带来的影响借鉴Generalized Focal Loss,使用任务解耦,分别学习box,cl

2D人体姿态识别-对Human3.6M数据集预处理(1):用python读取并处理cdf文件,cdflib包中各函数介绍,Human3.6M数据集2d关节点格式解读
文章目录 一、Human3.6M数据集结构介绍二、处理cdf.文件1.法一:使用nasa官方提供的CDF library2.法二:使用CDF library的纯python替代品:cdflib1)安装cdflib2)cdflib中各函数介绍①读取一个cdf.文件 cdflib.CDF('xxx.cdf')②查看此cdf.文件信息: cdf_info()③提取此cdf文件中的变量:varget
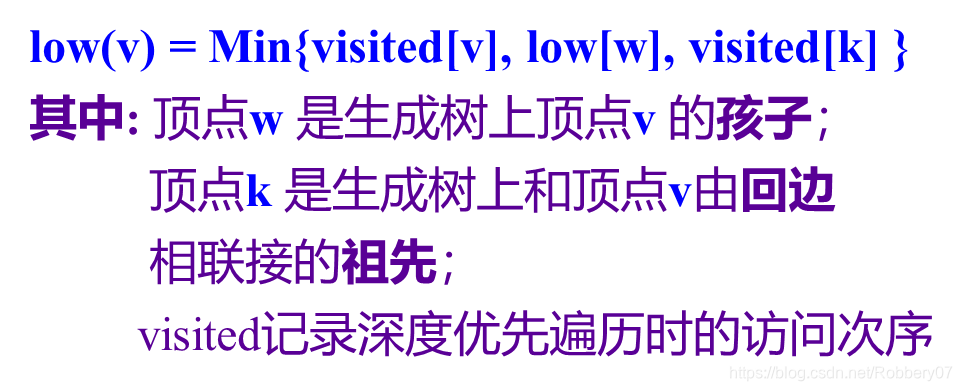
图的关节点(Tarjan算法)
数据结构复习–求图的关节点(Tarjan算法) 文章目录 重连通图的关节点(割点)关节点重(双)连通图 深度优先生成树与回边Visited数组与Low数组visited数组low数组Low数组求法 关节点的判定Low[w]>=Visited[v]的理解: Tarjan算法注意点:时间复杂度分析: 重连通图的关节点(割点) 关节点 若连通图中某个顶点和其相关联的边被删去后,该