本文主要是介绍IMUGNSS 误差状态卡尔曼滤波器(ESKF)的离散时间的ESKF 运动方程与运动过程,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
IMU&GNSS 误差状态卡尔曼滤波器(ESKF)的离散时间的ESKF 运动方程与运动过程
- 离散时间的ESKF 运动方程
- ESKF的运动过程
离散时间的ESKF 运动方程
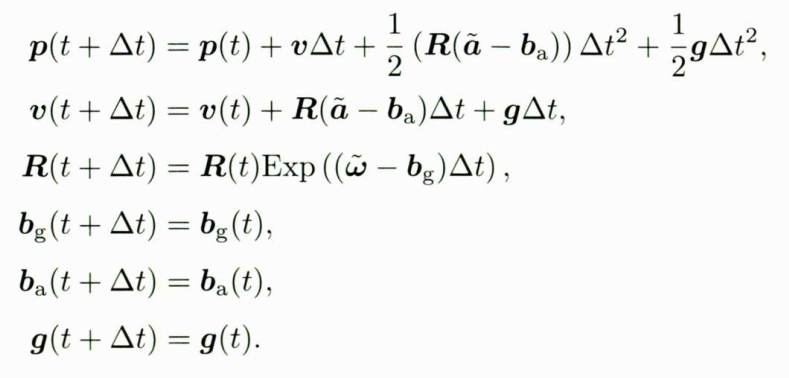
名义状态变量的离散时间运动方程可以写为:(不用考虑噪声,噪声在误差状态中)
误差状态变量的离散时间运动方程为:
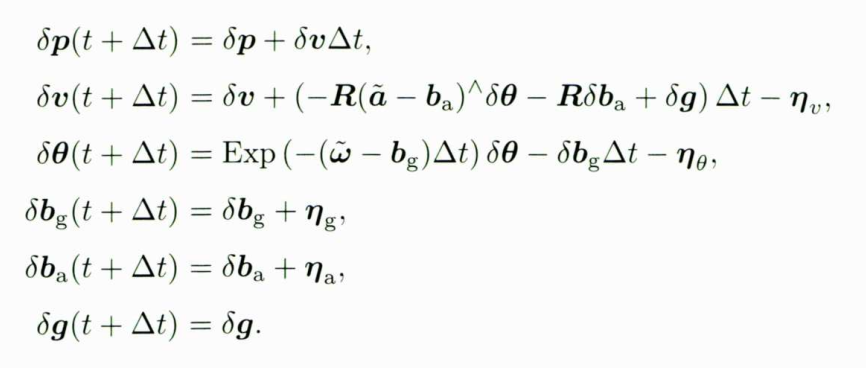
式中右侧部分省略了括号里的(t)以简化公式
噪声项并不参与递推,需要把它们单独归入噪声部分。连续时间的噪声项可以视为随机过程的能量谱密度,而离散时间下的噪声 变量就是我们日常看到的随机变量。这些噪声随机变量的标准差可以列写为:

其中前两式的 delta t 是由于积分关系导致的,后两式则和 离散时间下的 零偏游走的标准差公式 一致
至此,完成了在ESKF中进行IMU递推的过程,对应卡尔曼滤波器中的状态方程。为了让滤波器收敛,需要外部的观测对卡尔曼滤波器进行修正,也是所谓的组合导航。当然组合导航的方法很多,从传统的EKF,到本节介绍的ESKF,以及预积分和图优化都可以用于组合导航中。
下面以融合GNSS观测为离,梳理如何在ESKF中融合这些观测数据,形成一个收敛的卡尔曼滤波器。
ESKF的运动过程
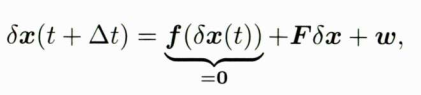
下面写出ESKF的运动过程。根据误差状态变量 离散时间运动方程,可以整体的记为:

其中w为噪声,按照前面的定义,Q应该为

两侧的零,是由于第一个和最后一个方程本身没有噪声导致的
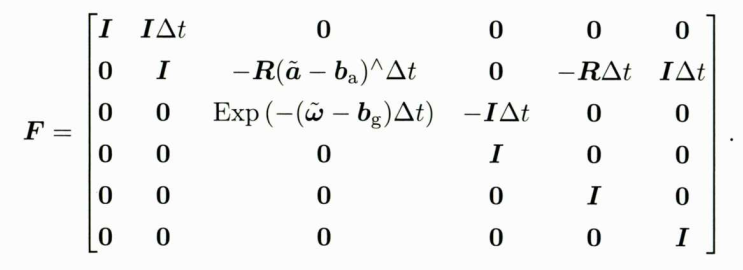
为了保持与EKF的符号统一,计算运动方程的线性化形式
其中,F为线性化后的雅克比矩阵。由于 误差状态变量的离散时间运动方程 已经线性化,所以F矩阵就是把它们线性系数拿出来(注意变量定义的顺序)
在此基础上,执行ESKF的预测过程。预测过程包括对名义状态的预测(IMU积分)及对误差状态的预测
由于ESKF的误差状态在每次更新以后会被重置为零,即

因此,运动方程的均值部分,即
没有太大意义
协方差部分则描述了整个误差估计的分布情况。
从直观意义上来看,运动方程的噪声协方差中增加了Q项,可以看作增大的过程。
这篇关于IMUGNSS 误差状态卡尔曼滤波器(ESKF)的离散时间的ESKF 运动方程与运动过程的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!






