eskf专题

【附源码+代码注释】误差状态卡尔曼滤波(error-state Kalman Filter),扩展卡尔曼滤波,实现GPS+IMU融合,EKF ESKF GPS+IMU
2023年9月4日更新:重构代码,修复代码BUG,修复公式错误,统一坐标系。 2021年6月23日更新:发现了一个讲卡尔曼滤波特别好的视频,但是需要科学上网。卡尔曼滤波视频 最近在学习卡尔曼滤波器,今天抽出点儿时间总结一下! 我的所有源码都放在Github的仓库里面了:https://github.com/zm0612/eskf-gps-imu-fusion(记得要给我点star呀,哈哈
IMUGNSS的误差状态卡尔曼滤波器(ESKF)---更新过程
IMU&GNSS的误差状态卡尔曼滤波器(ESKF)---更新过程 ESKF的更新过程 ESKF的更新过程 前面介绍的是ESKF的运动过程,现在考虑更新过程。假设一个抽象的传感器能够对状态变量产生观测,其观测方程为抽象的h,那么可以写为 其中z为观测数据,v为观测噪声,V为该噪声的协方差矩阵。 在传统的EKF中,可以直观地对观测方程线性化,求出观测方程相对与状态变量的雅克比矩阵
IMUGNSS 误差状态卡尔曼滤波器(ESKF)的离散时间的ESKF 运动方程与运动过程
IMU&GNSS 误差状态卡尔曼滤波器(ESKF)的离散时间的ESKF 运动方程与运动过程 离散时间的ESKF 运动方程ESKF的运动过程 离散时间的ESKF 运动方程 名义状态变量的离散时间运动方程可以写为:(不用考虑噪声,噪声在误差状态中) 误差状态变量的离散时间运动方程为: 式中右侧部分省略了括号里的(t)以简化公式 噪声项并不参与递推,需要把它们单独归入噪声部分。连
move_base+自己的定位程序(攻略篇) --- 成功实现ESKF的lidar+imu以及move_base的路径规划
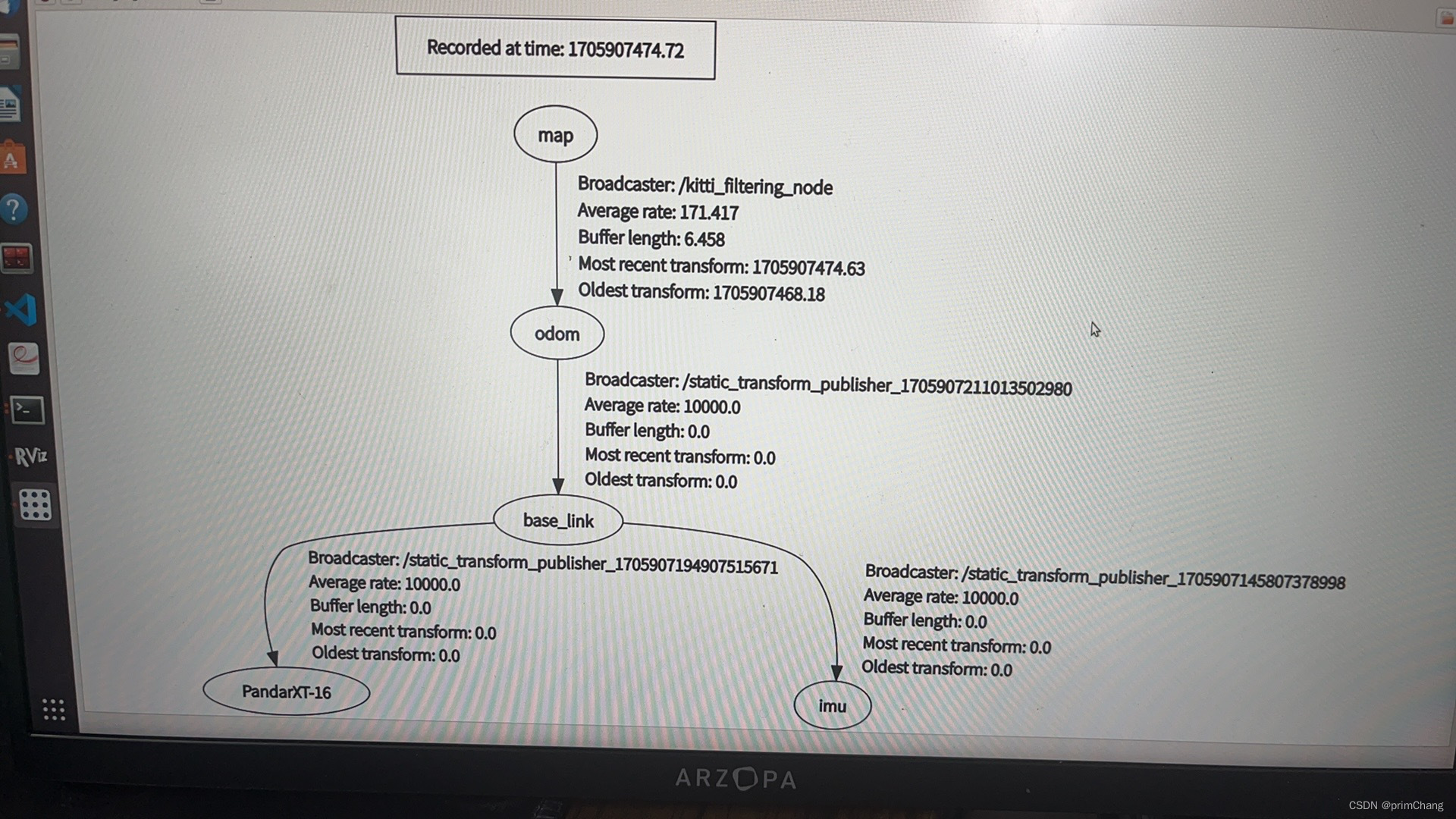
临近放假,老板要求回去之前找其汇报进展,无奈近几月忙于毕业论文的编写,实在是没有多少可以汇报的内容,想来自己弄得定位程序只能实现定位,要不自己再加一个路径规划,直接干! 本文的文字量较大,请各位耐心阅读 首先,我自己的定位程序是参考网课写的,其主要实现的是基于ESKF的LIDAR/GNSS/IMU的多传感器融合定位系统,那么我自己的程序的TF树如下图所示。 可以看到,我的定位程序给出的是m