本文主要是介绍粒子群优化算法PSO与鹈鹕优化算法(POA)求解无人机三维路径规划(MATLAB代码),希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
一、无人机路径规划模型介绍

二、算法介绍
close all
clear
clc
dbstop if all error
warning ('off')
global model
model = CreateModel(); % 创建模型
F='F1';
[Xmin,Xmax,dim,fobj] = fun_info(F);%获取函数信息
pop=100;%种群大小(可以自己修改)
maxgen=100;%最大迭代次数(可以自己修改)
[fMin5,bestX5,ConvergenceCurve5] = PKO(pop, maxgen,Xmin,Xmax,dim,fobj);
cost=MyCost(bestX5,2);%'路径成本','威胁成本','高度成本','转角成本'
%% 计算航迹坐标
BestPosition5 = SphericalToCart(bestX5);
%% 保存各算法的目标函数值及收敛曲线
save fMin5 fMin5
save ConvergenceCurve5 ConvergenceCurve5
save cost cost
%% 保存航迹坐标
save BestPosition5 BestPosition5
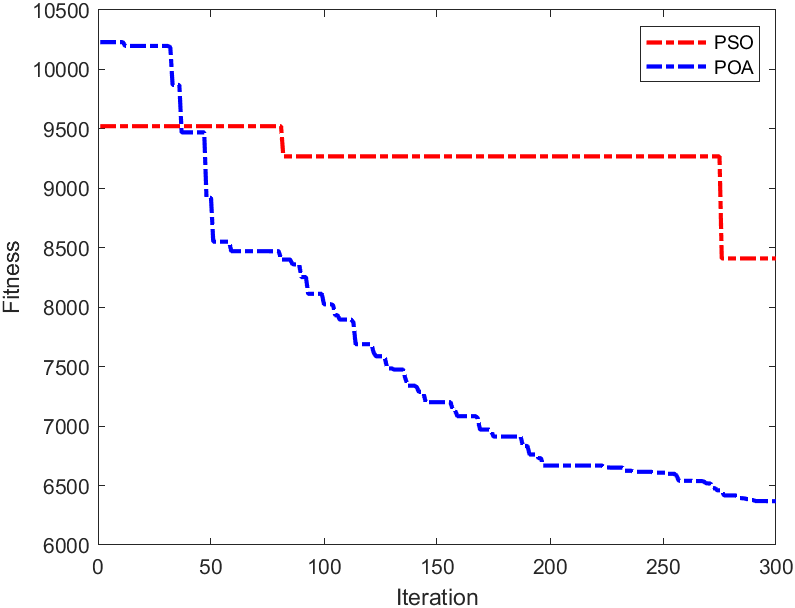
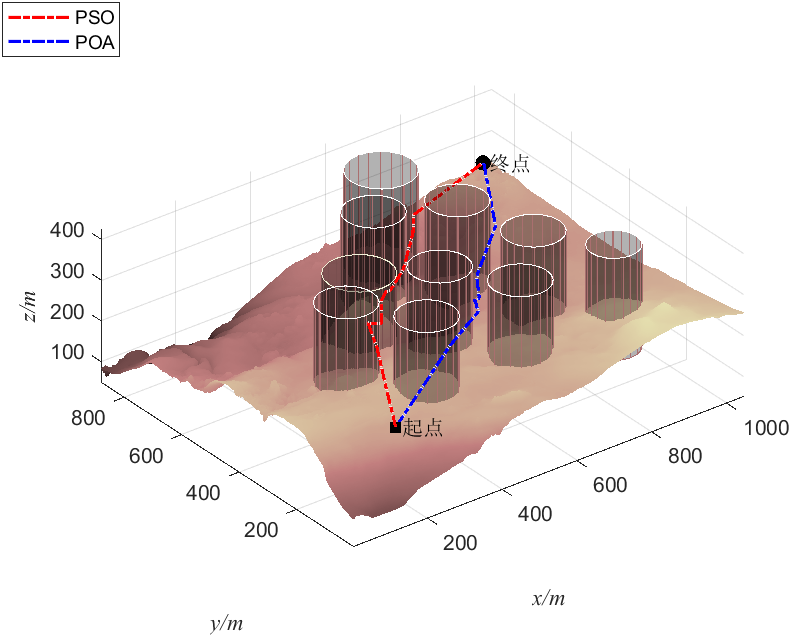
三、部分结果

四、完整MATLAB代码
粒子群优化算法PSO与鹈鹕优化算法(POA)求解无人机三维路径规划(MATLAB代码)
这篇关于粒子群优化算法PSO与鹈鹕优化算法(POA)求解无人机三维路径规划(MATLAB代码)的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!





