本文主要是介绍Unity单个物体绑定多个相机在轨道上移动,录制不同角度视频,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
环境搭建
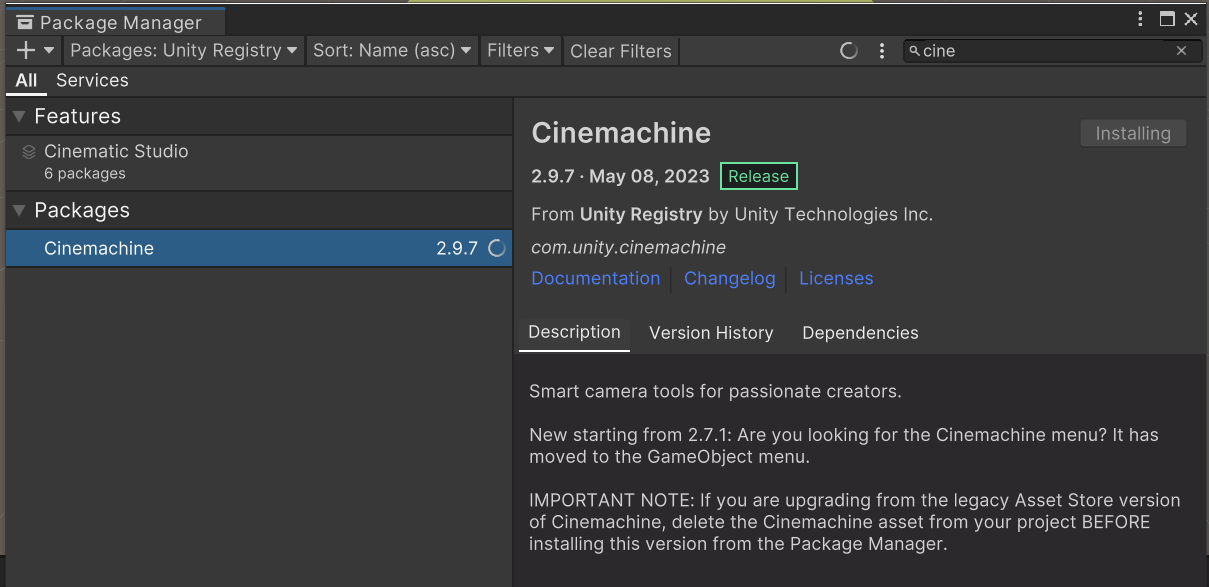
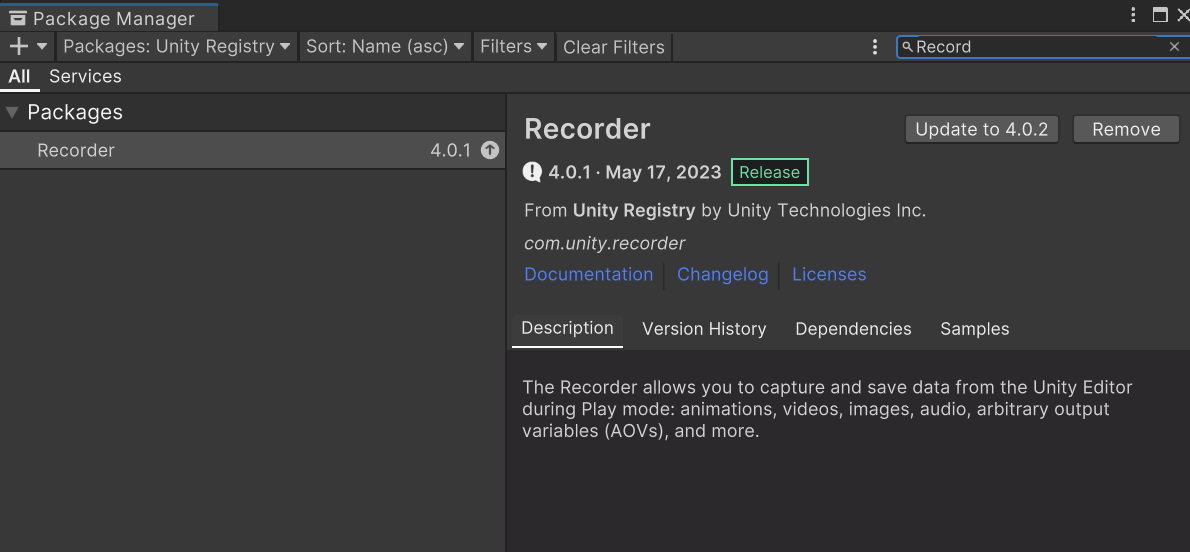
下载Cinemachine插件安装
打开包管理器
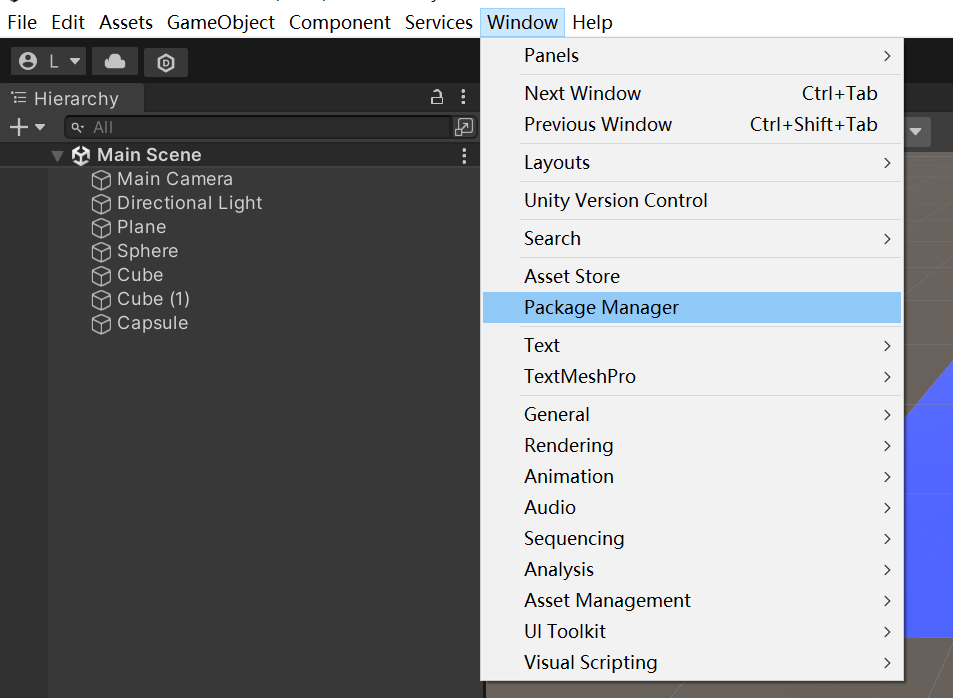
下载cinemachine插件
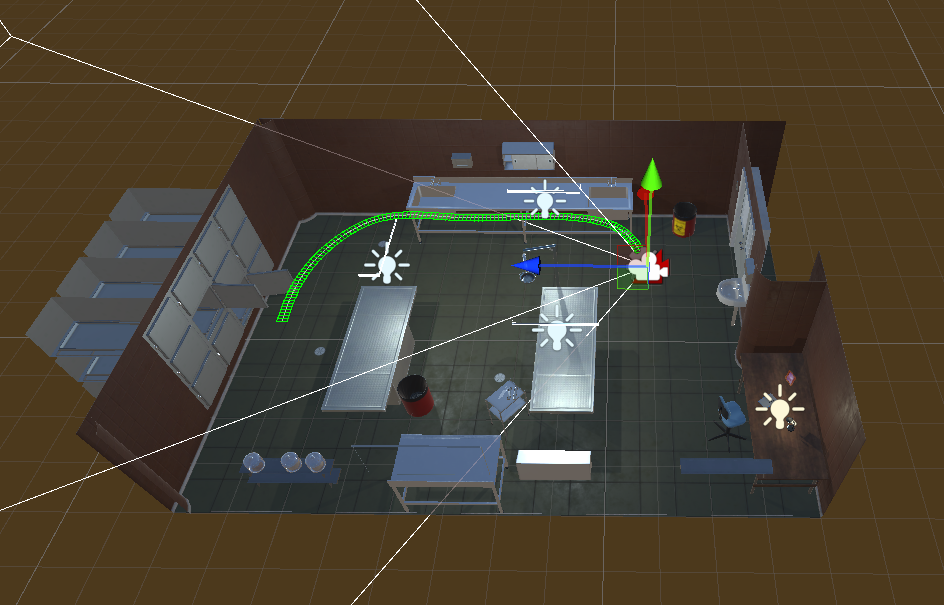
创建轨道
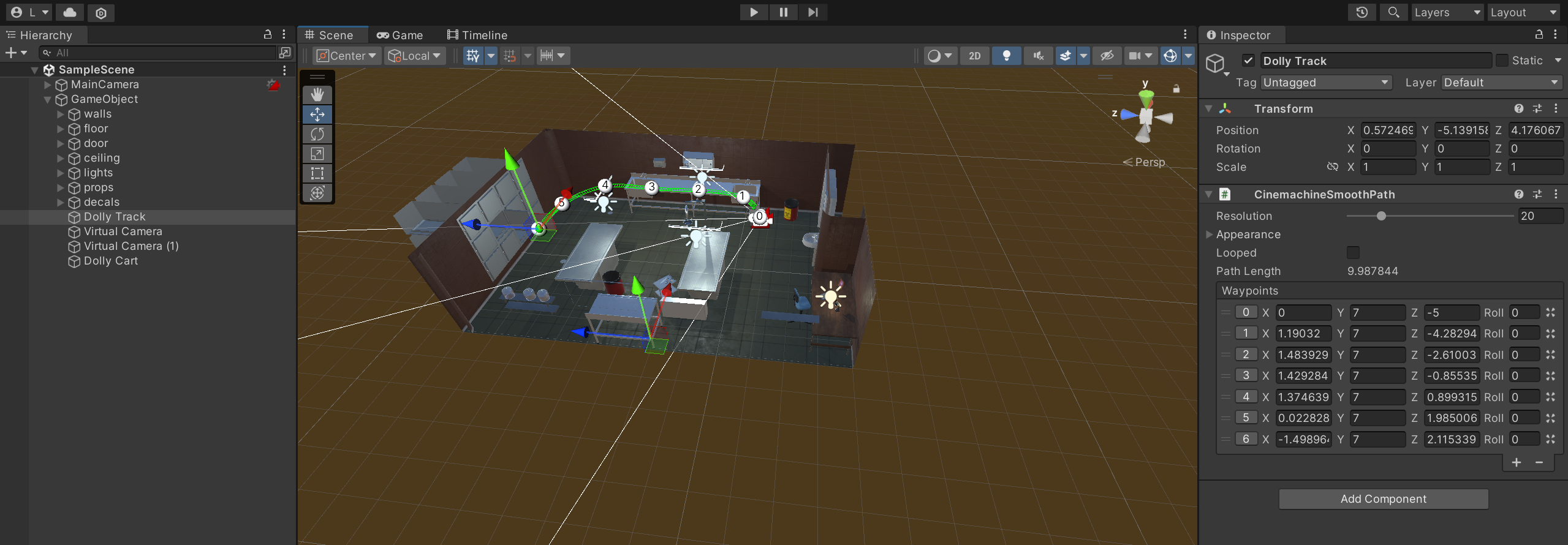
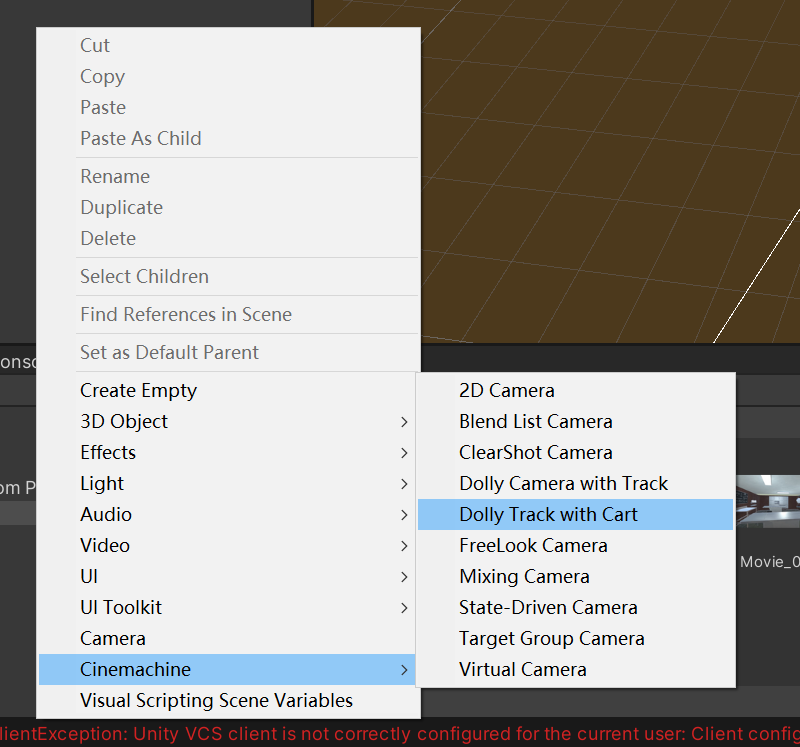
使用dolly track 创建轨道

右侧可以删减关键点,注意调整y坐标
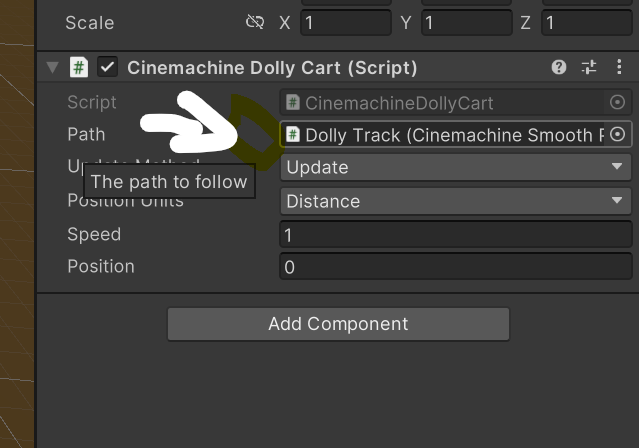
创建cart
把前面的轨道拖到path中,注意这里的speed要设定不为0才会动
设置VItual Camera
根据需求设定,Follow这个设为cart才跟着走(Dolly Enable勾上),Look At设定为Cart才会让相机跟着轨迹的变化视角转换(设定body和Aim来决定朝向),
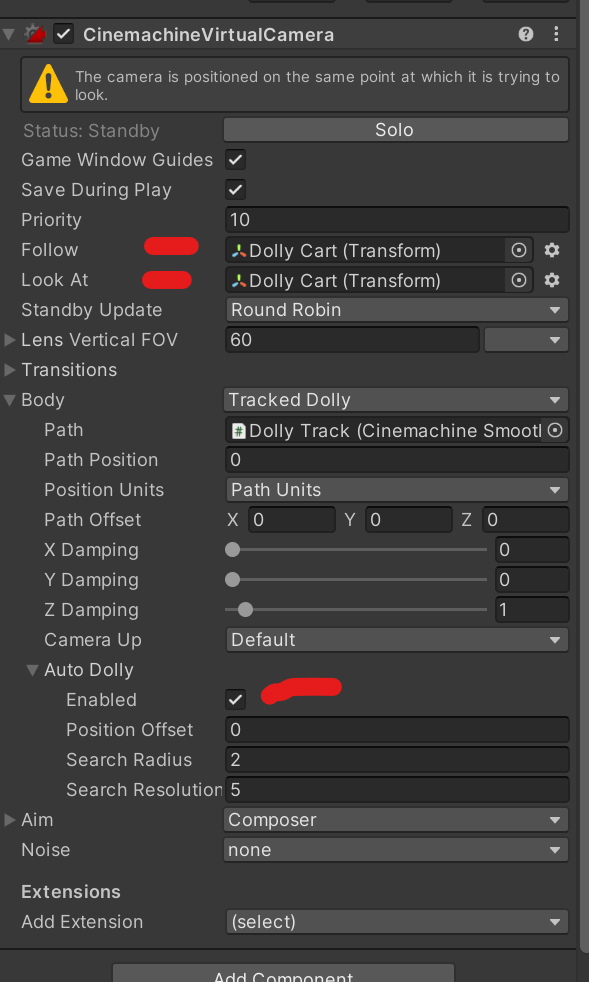
这个时候按下播放键就可以运行了,VItual Camera和MainCamera是绑定在一起的
录制
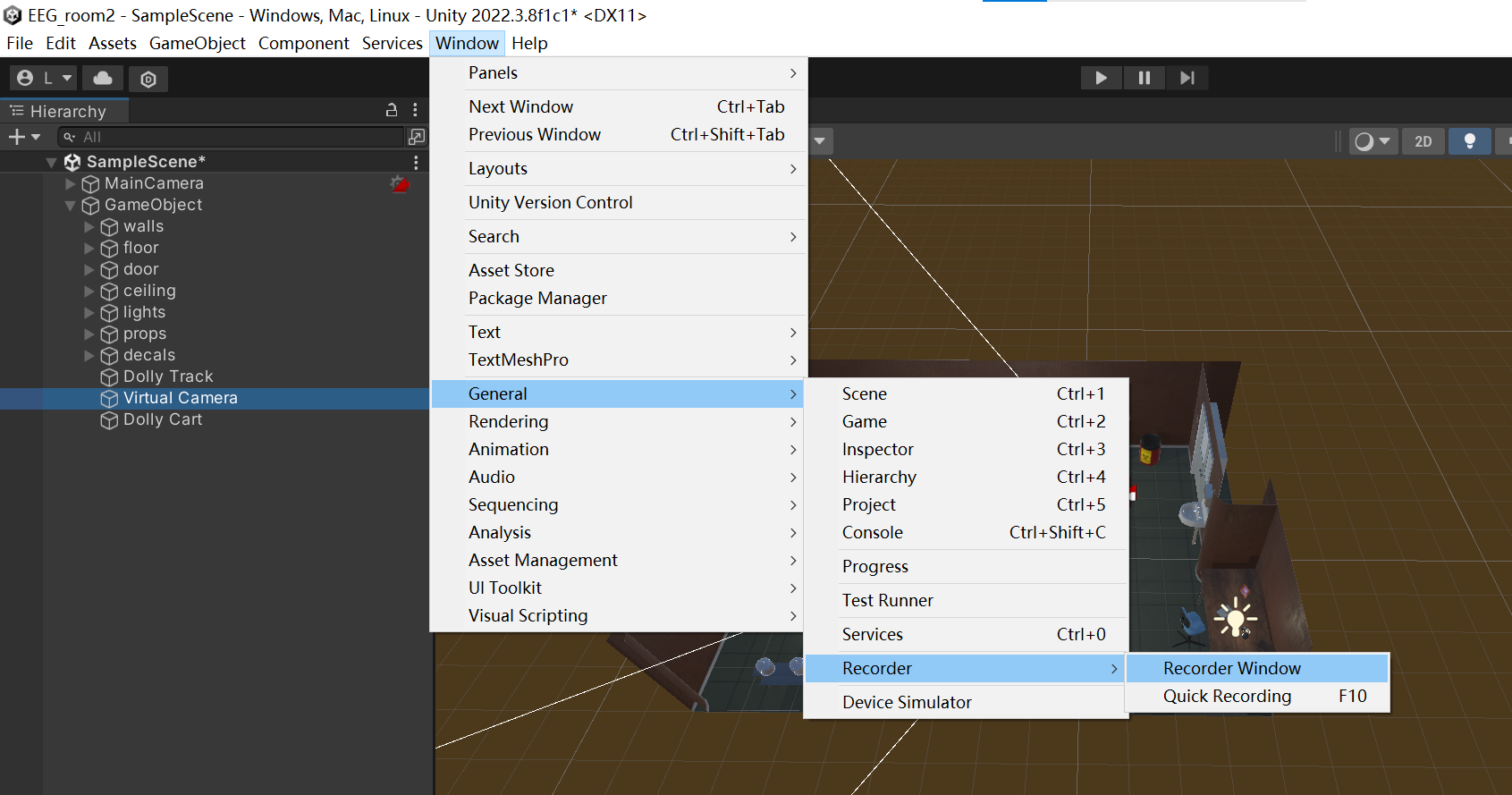
下载Record 插件
打开录制窗口
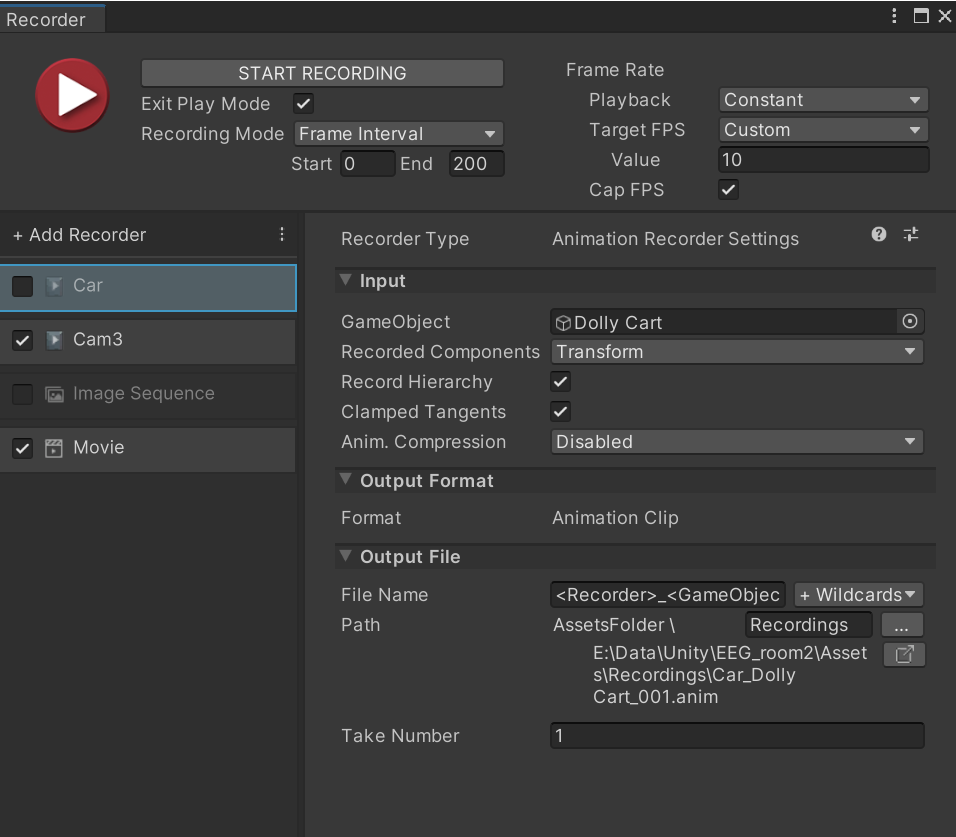
设置
这里一共可以记录几种
Animation:可以用来记录物体或相机的位置和旋转
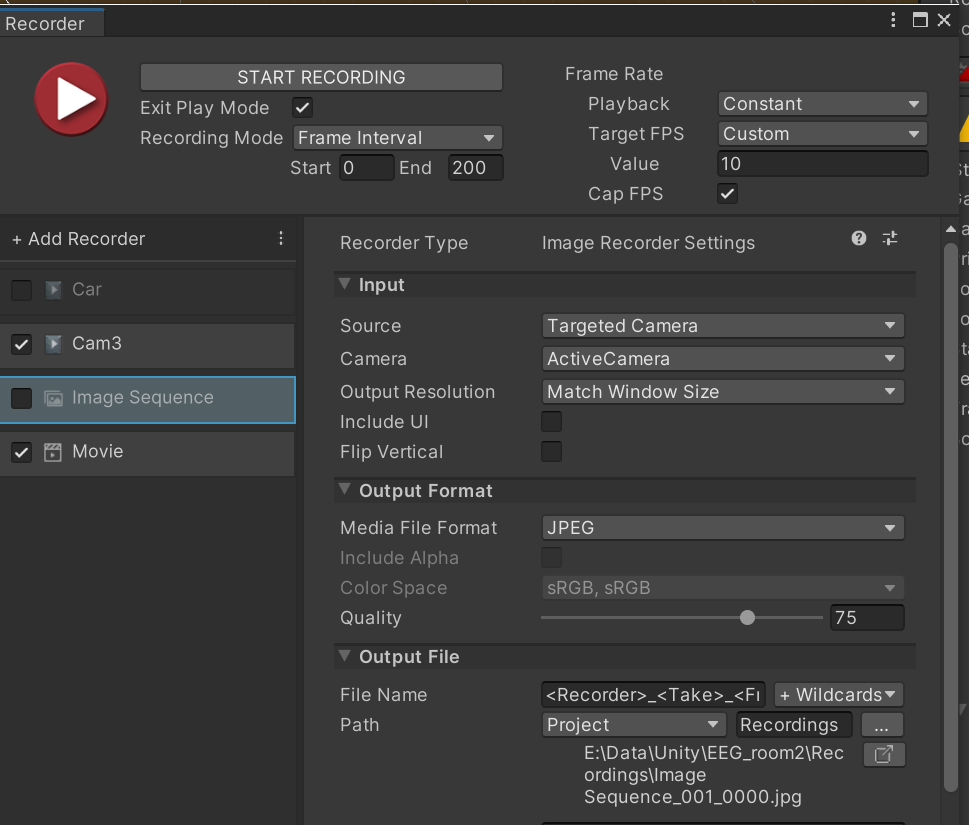
Image:以图片形式记录
Video:以视频形式记录
按照我下面这种方式就是一帧一帧跑,设定固定的帧率,选择要跑多少帧
Compression选Disable才能保证每一帧都保存下来
图片视频要这样选才能以虚拟相机为内容进行录制
后言
本来想多相机同时录制的,但是在录制那一块不行,多个虚拟相机能跑,但是不能录制,所以目前只一次选一个相机进行录制
这篇关于Unity单个物体绑定多个相机在轨道上移动,录制不同角度视频的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!




