本文主要是介绍遥感影像处理利器:PyTorch框架下CNN-Transformer,地物分类、目标检测、语义分割和点云分类,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
目录
专题一 深度卷积网络知识详解
专题二 PyTorch应用与实践(遥感图像场景分类)
专题三 卷积神经网络实践与目标检测
专题四 卷积神经网络的遥感影像目标检测任务案例【FasterRCNN】
专题五 Transformer与遥感影像目标检测
专题六 Transformer的遥感影像目标检测任务案例 【DETR】
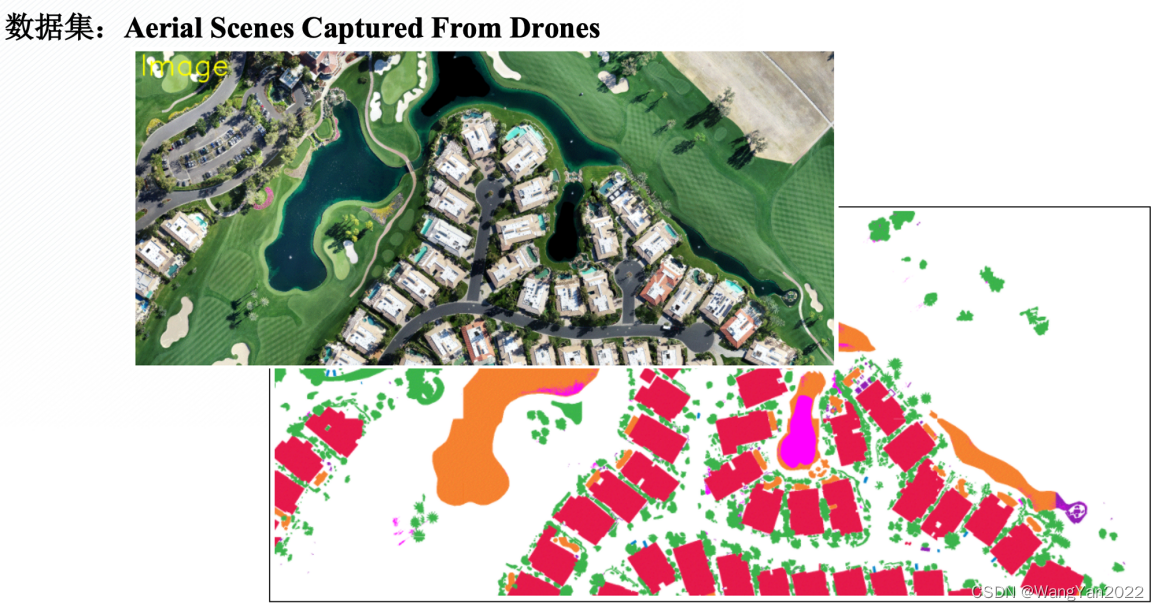
专题七 深度学习与遥感影像分割任务
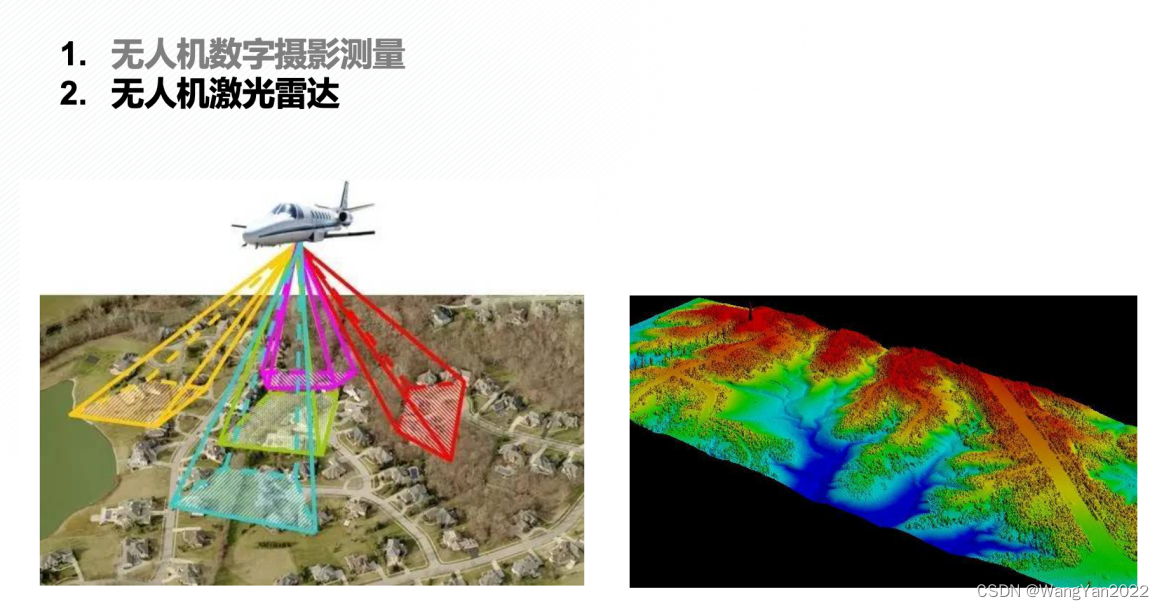
专题八 深度学习下的ASL(机载激光扫描仪)点云数据语义分类任务的基本知识
专题九 遥感影像问题探讨与深度学习优化技巧
更多应用
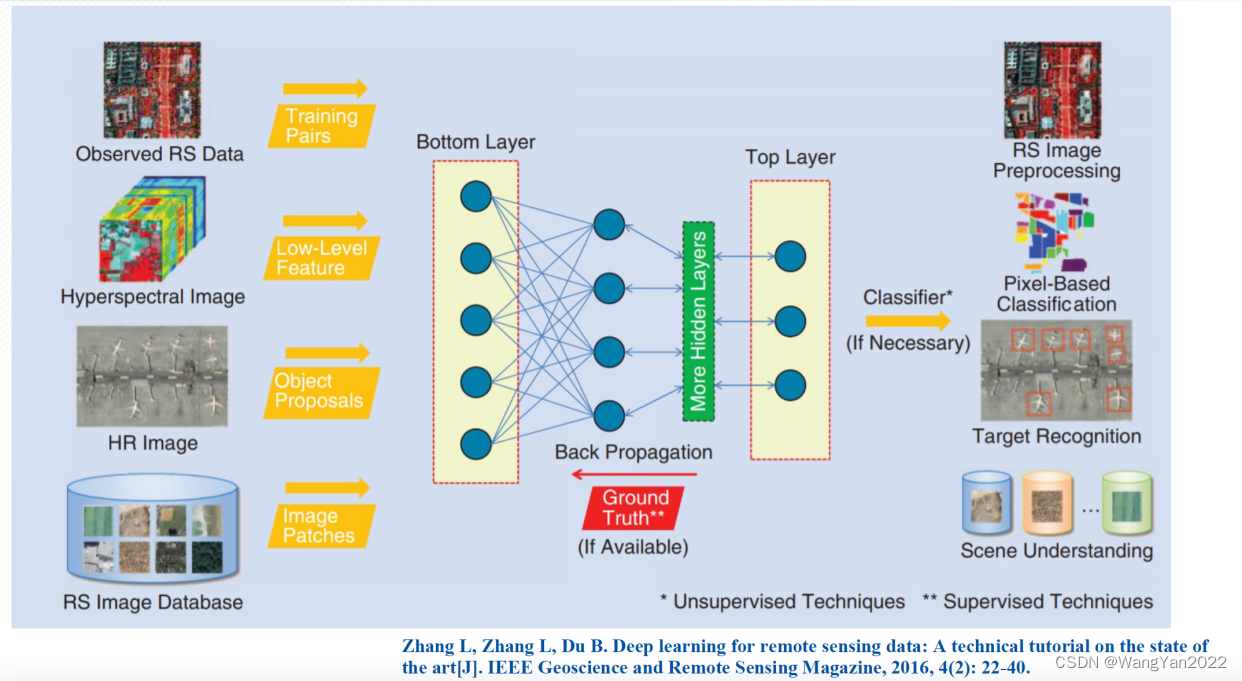
深度卷积网络采用“端对端”的特征学习,通过多层处理机制揭示隐藏于数据中的非线性特征,能够从大量训练集中自动学习全局特征(这种特征被称为“学习特征”),是其在遥感影像自动目标识别取得成功的重要原因,也标志特征模型从手工特征向学习特征转变。同时,当前以Transformer等结构为基础模型的检测模型也发展迅速,在许多应用场景下甚至超过了原有的以CNN为主的模型。虽然以PyTorch为主体的深度学习平台为使用卷积神经网络也提供程序框架。但卷积神经网络涉及到的数学模型和计算机算法都十分复杂、运行及处理难度很大,PyTorch平台的掌握也并不容易。
使广大学者能理解卷积神经网络背后的数学模型和计算机算法,掌握利用PyTorch为基础的遥感影像和无人机影像的分类,目标检测,以及语义分割等应用。
专题一 深度卷积网络知识详解
1.深度学习在遥感图像识别中的范式和问题
2.深度学习的历史发展历程
3.机器学习,深度学习等任务的基本处理流程
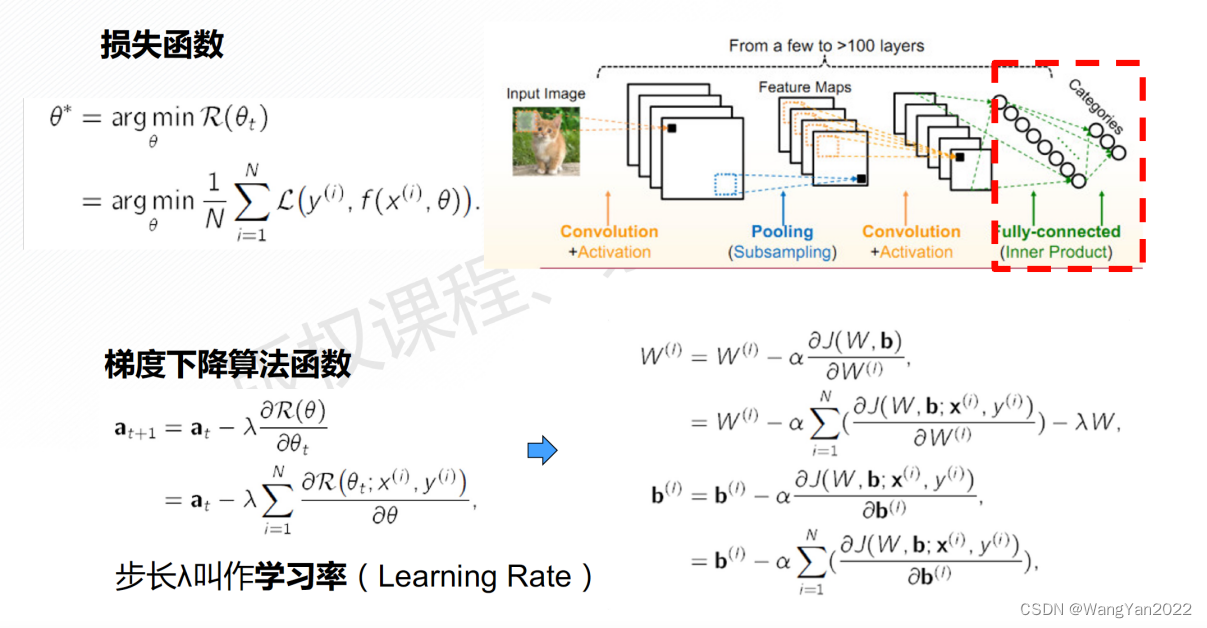
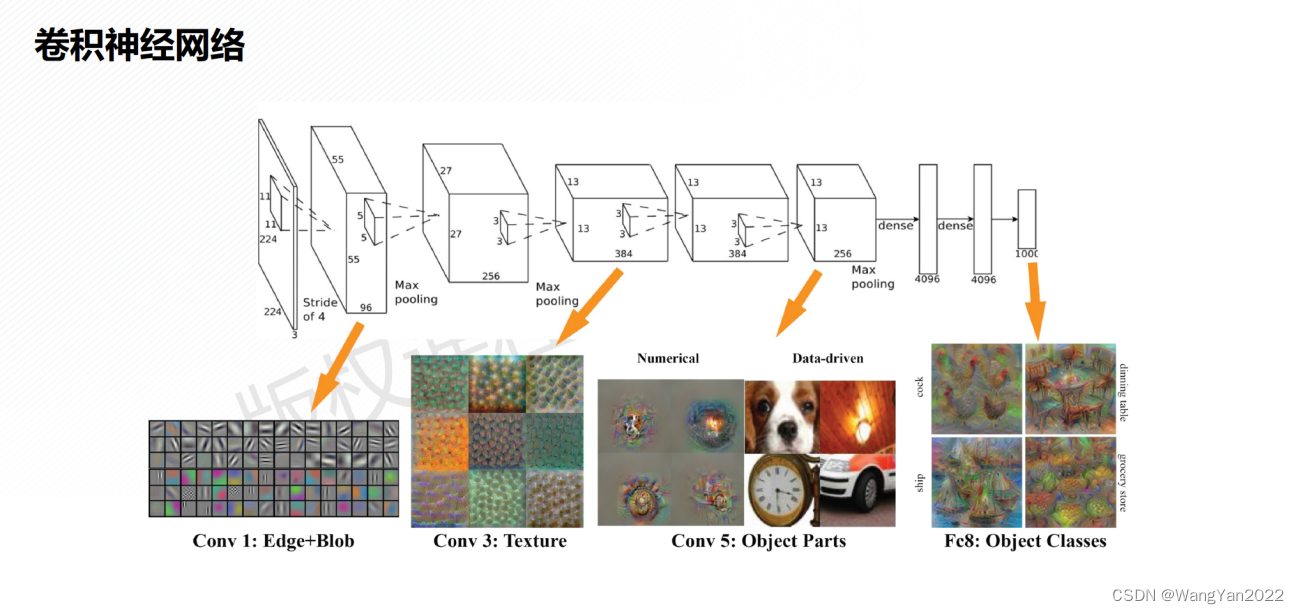
4.卷积神经网络的基本原理
5.卷积运算的原理和理解
6.池化操作,全连接层,以及分类器的作用
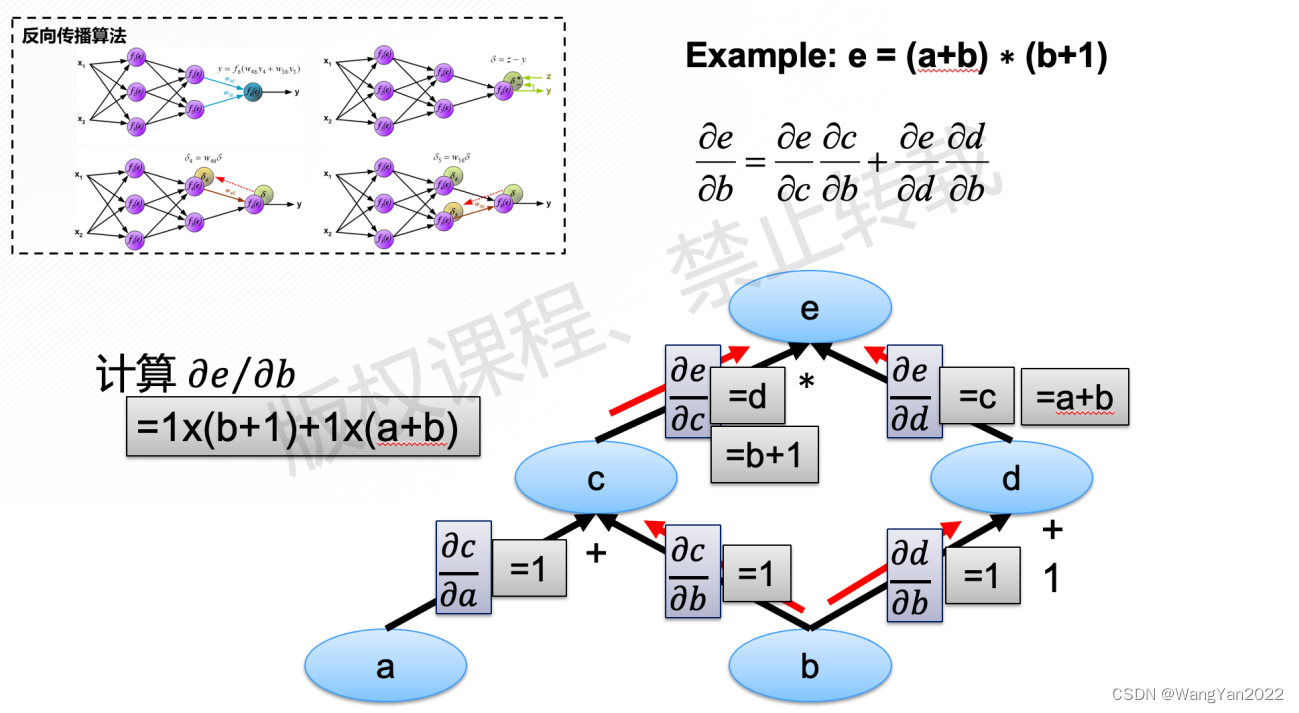
7.BP反向传播算法的理解
8.CNN模型代码详解
9.特征图,卷积核可视化分析
专题二 PyTorch应用与实践(遥感图像场景分类)
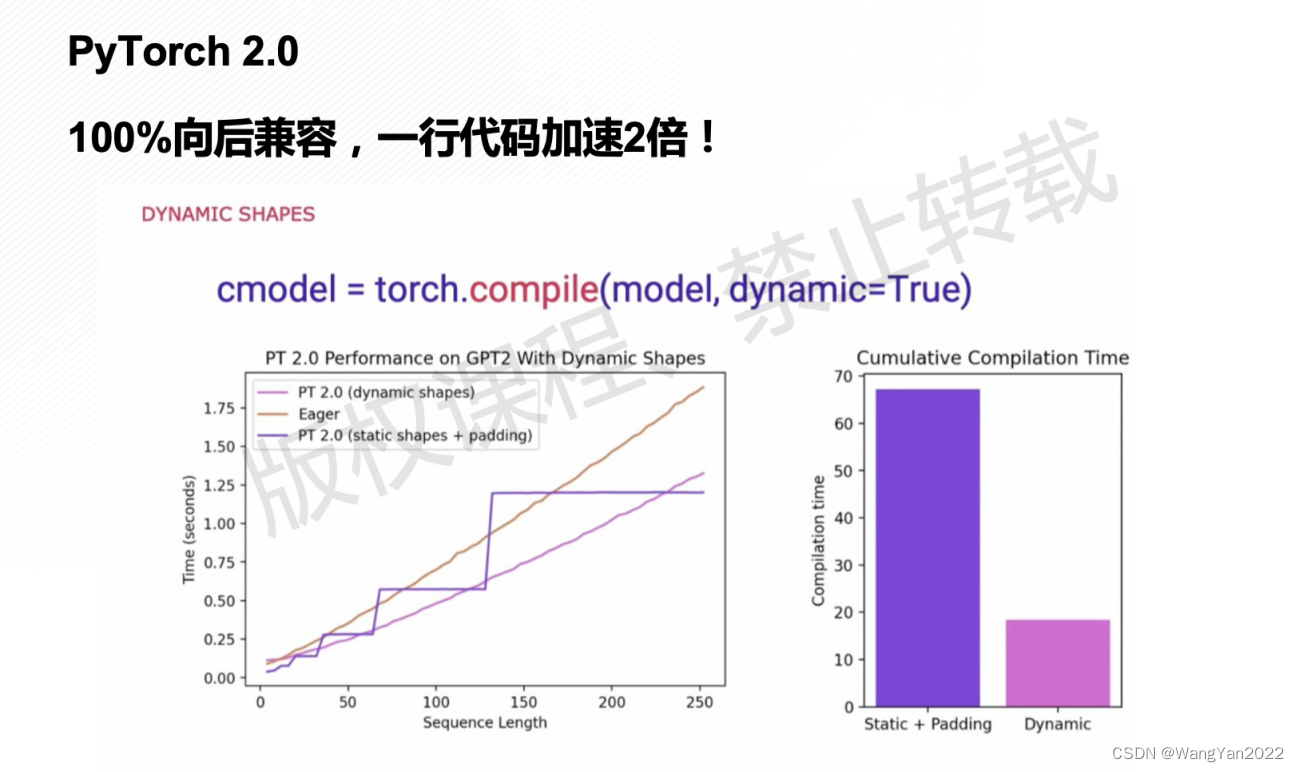
1.PyTorch简介
2.动态计算图,静态计算图等机制
3.PyTorch的使用教程
4.PyTorch的学习案例
5.PyTorch的基本使用与API
6.PyTorch图像分类任务讲解
7.不同超参数,如初始化,学习率对结果的影响
8.使用PyTorch搭建神经网络并实现手写数字的分类
9.使用PyTorch修改模型并提升分类模型表现
专题三 卷积神经网络实践与目标检测
1.深度学习下的遥感影像目标检测基本知识
2.目标检测数据集的图像和标签表示方式
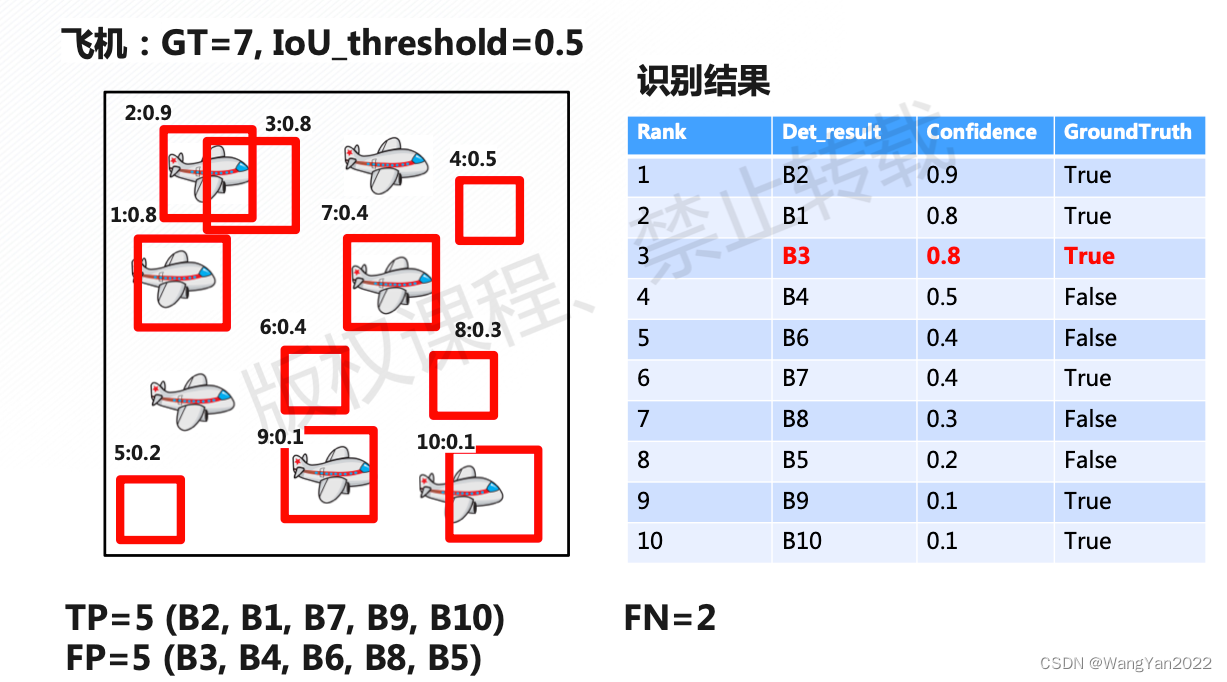
3.讲解目标检测模型的评估方案,包括正确率,精确率,召回率,mAP等
4.无人机影像的植物识别和统计
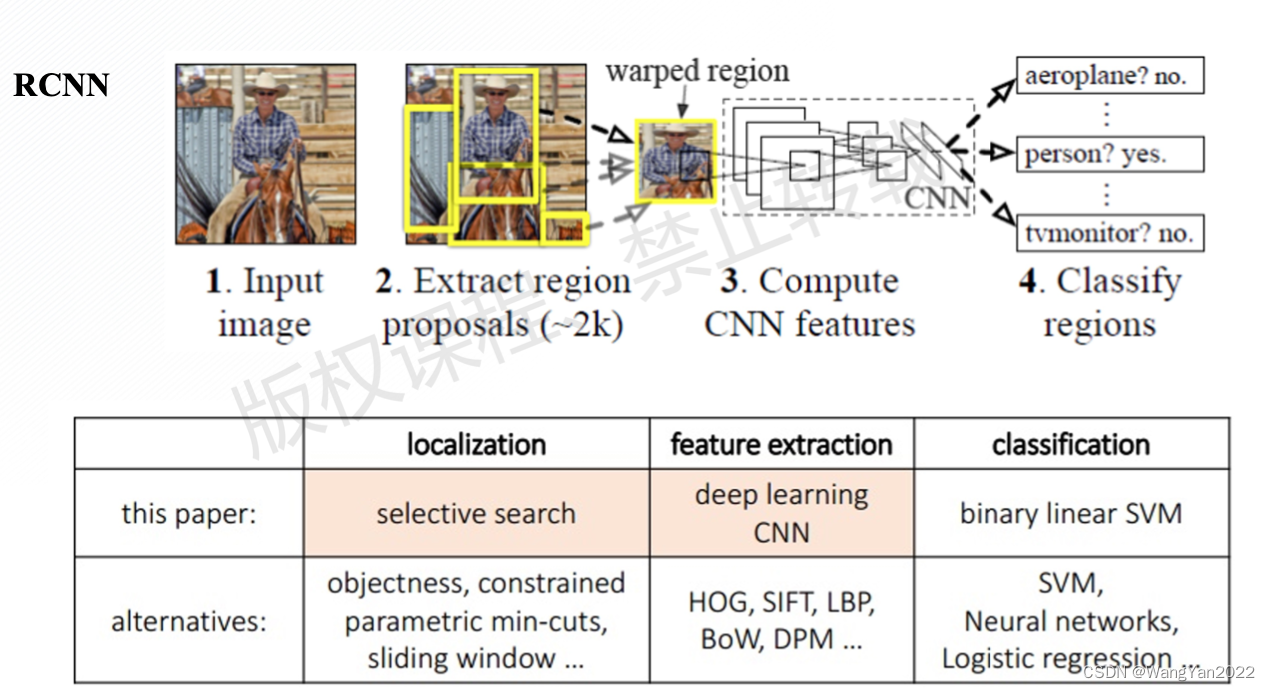
5.讲解two-stage(二阶)检测模型框架,RCNN, Fast RCNN, Faster RCNN等框
6.架的演变和差异
7.讲解 one-stage(一阶)检测模型框架,SDD ,Yolo等系列模型
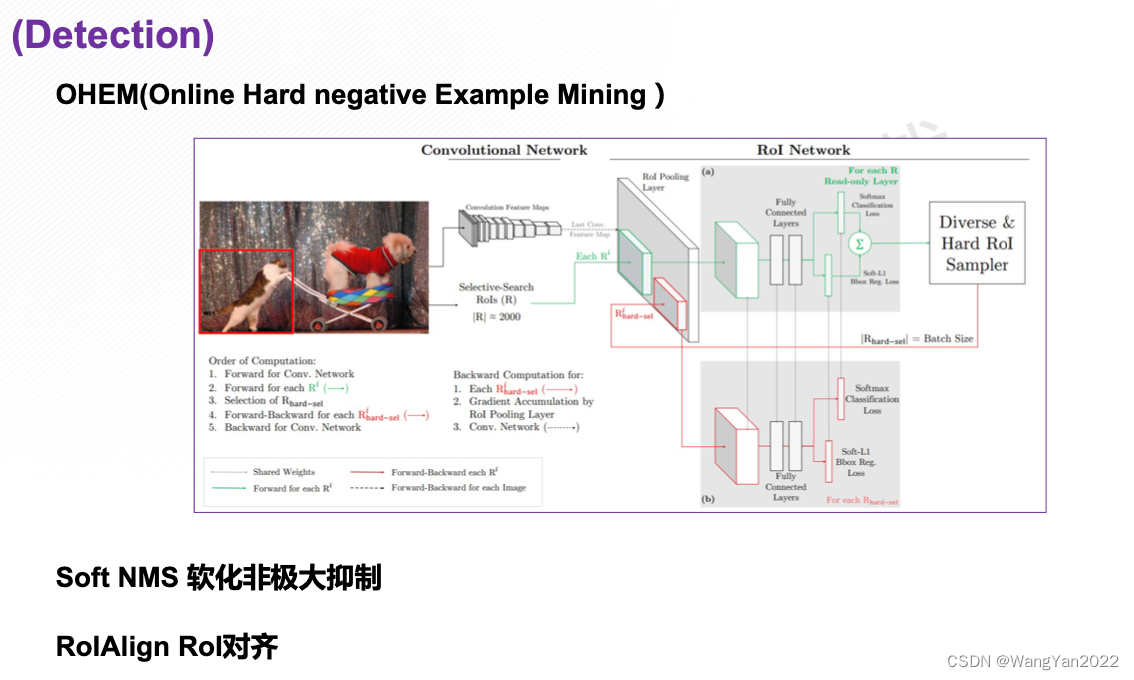
8.现有检测模型「CNN系列」发展小结,包括OHEM、FCN、DCN等模型
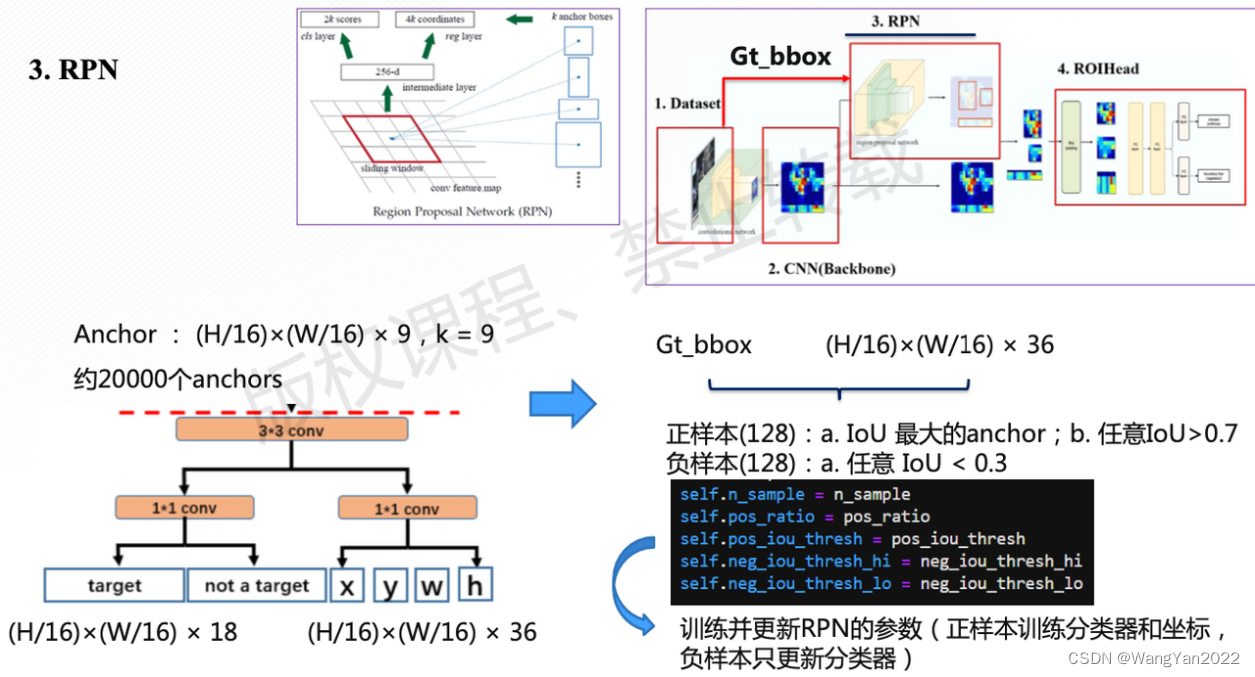
专题四 卷积神经网络的遥感影像目标检测任务案例【FasterRCNN】
1.一份完整的Faster-RCNN 模型下实现遥感影像的目标检测
2.讲解数据集的制作过程,包括数据的存储和处理
3.数据集标签的制作
4.模型的搭建,组合和训练
5.检测任数据集在验证过程中的注意事项
专题五 Transformer与遥感影像目标检测
1.从卷积运算到自注意力运算 self-attention
2.pytorch实现的自监督模块
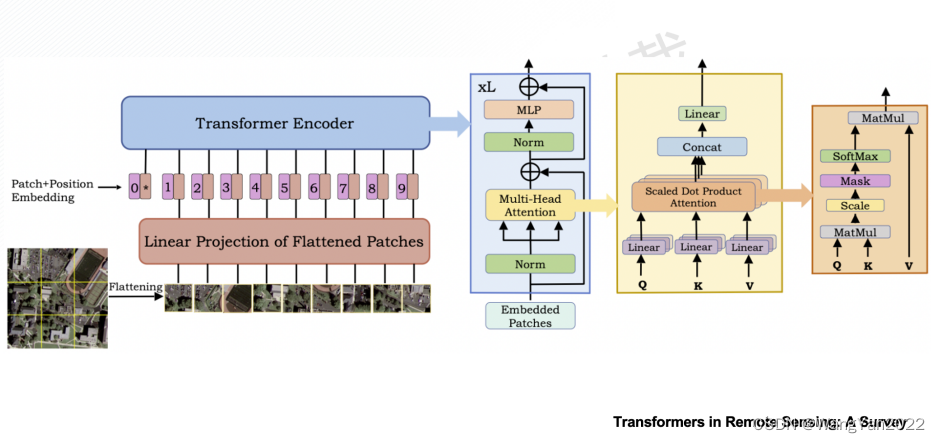
3.从Transformer到Vision Transformer (ViT)
4.ViT模型在遥感影像中的应用
专题六 Transformer的遥感影像目标检测任务案例 【DETR】
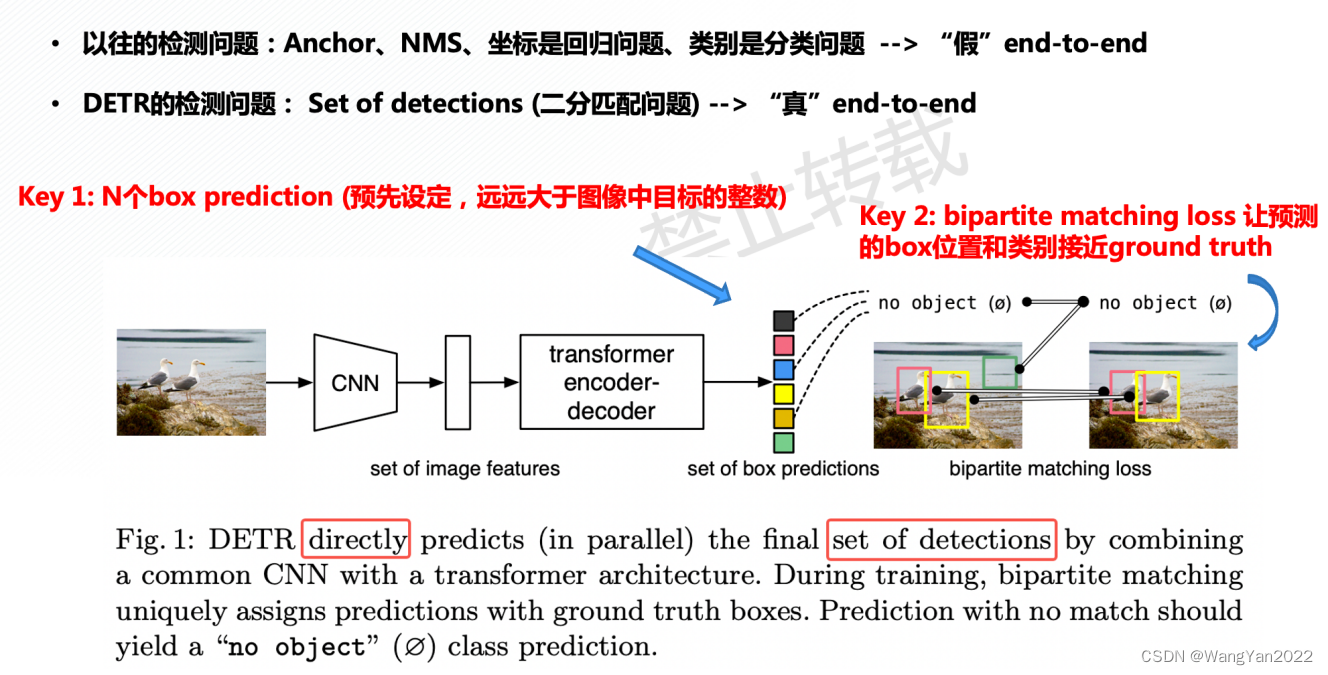
1.Transformer下的新目标检测范式,DETR
2.各类模型在遥感影像下的对比和调研
3.一份完整的DETR模型下实现遥感影像的目标检测
4.讲解针对检测任务的优化策略
专题七 深度学习与遥感影像分割任务
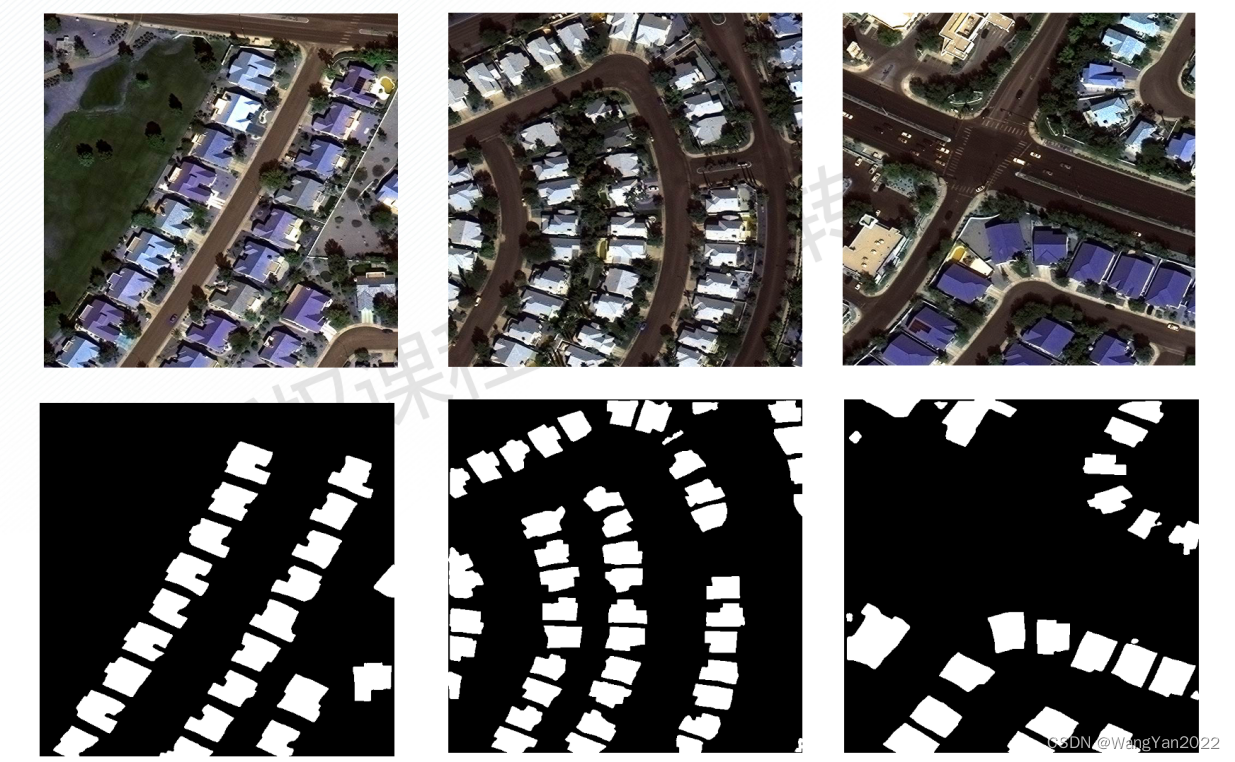
1.深度学习下的遥感影像分割任务的基本概念
2.讲解FCN,SegNet,U-net等模型的差异
3.分割模型的发展小结
4.遥感影像分割任务和图像分割的差异
5.在遥感影像分割任务中的注意事项案例
讲解数据集的准备和处理
遥感影像划分成小图像的策略
模型的构建和训练方法
验证集的使用过程中的注意事项
专题八 深度学习下的ASL(机载激光扫描仪)点云数据语义分类任务的基本知识
1.PointNet与PointNet++等模型的基本讲解
2.点云数据的预处理和划分
3.点云数据的语义分割
4.点云数据的预测结果分析
专题九 遥感影像问题探讨与深度学习优化技巧
1.现有几个优秀模型结构的演变原理,包括AlexNet,VGG,googleNet,ResNet,DenseNet等模型
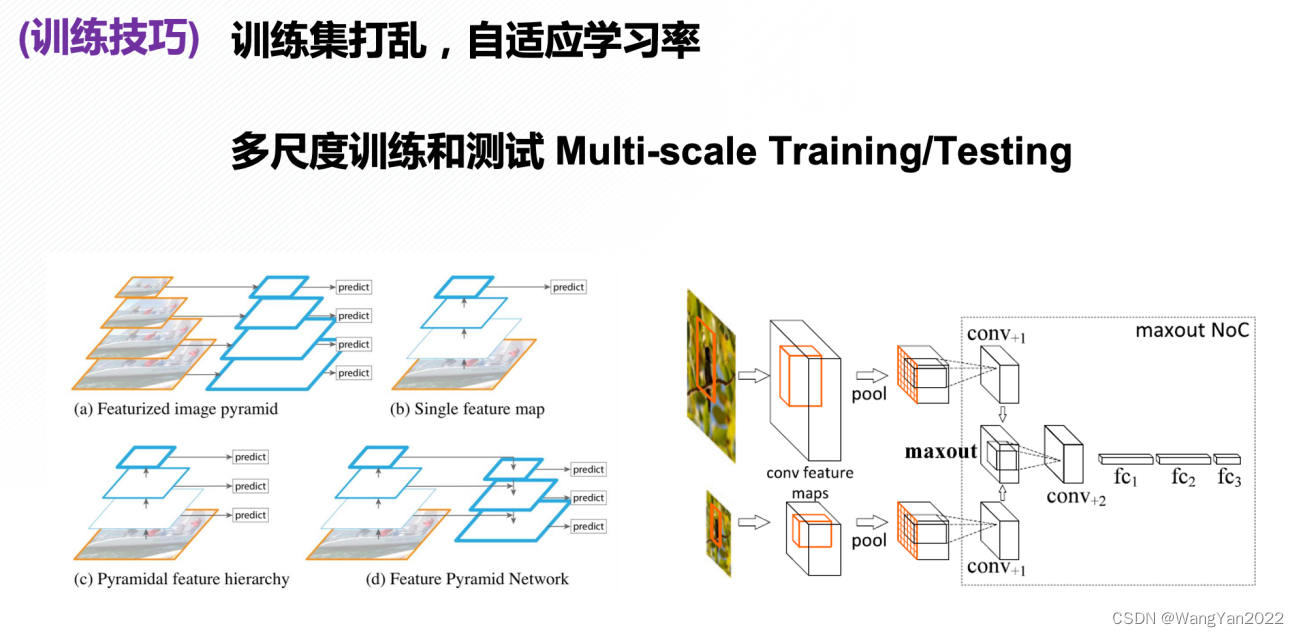
2.从模型演变中讲解实际训练模型的技巧
3.讲解针对数据的优化策略
4.讲解针对模型的优化策略
5.讲解针对训练过程的优化策略
6.讲解针对检测任务的优化策略
7.讲解针对分割任务的优化策略
8.提供一些常用的检测,分割数据集的标注工具
注:请提前自备电脑及安装所需软件
更多应用
①基于python深度学习遥感影像地物分类与目标识别、分割实践
②基于PyTorch深度学习无人机遥感影像目标检测、地物分类及语义分割实践
③遥感影像目标检测:从CNN(Faster-RCNN)到Transformer(DETR)
④PyTorch深度学习遥感影像地物分类与目标检测、分割及遥感影像问题深度学习优化
基于PyTorch深度学习遥感影像地物分类与目标检测、分割及遥感影像问题深度学习优化_基于深度学习的遥感影像目标提取-CSDN博客文章浏览阅读6.5k次,点赞4次,收藏62次。理解卷积神经网络背后的数学模型和计算机算法,掌握利用PyTorch为基础的遥感影像地物分类,遥感图像目标检测,以及遥感图像目标分割等应用。_基于深度学习的遥感影像目标提取https://blog.csdn.net/weixin_46747075/article/details/127731714?spm=1001.2014.3001.5501★点 击 关 注,获取海量教程和资源
这篇关于遥感影像处理利器:PyTorch框架下CNN-Transformer,地物分类、目标检测、语义分割和点云分类的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!




