本文主要是介绍【高等数学】向量代数,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
向量代数
- 1、向量的概念及其线性运算
- 1.1、向量的概念
- 1.2、向量的线性运算
- 1.2.1、向量的加法
- 1.2.2、向量的减法
- 1.2.3、向量与数的乘法
- 1.3、空间直角坐标系
- 1.3.1、空间直角坐标系的基本概念
- 1.3.2、向量的坐标表示
- 1.4、利用坐标作向量的线性运算
- 1.5、向量的模、方向角、投影
- 1.5.1、向量的模与两点间距离公式
- 1.5.2、方向角与方向余弦
- 1.5.3、向量在轴上的投影
- 2、数量积、向量积、混合积
- 2.1、两向量的数量积
- 2.1.1、引例
- 2.1.2、定义
- 2.1.3、性质
- 2.1.4、运算律
- 2.1.5、数量积的坐标表示
- 2.2、两向量的向量积
- 2.2.1、定义
- 2.2.2、性质
- 2.2.3、运算律
- 2.2.4、向量积的坐标表示
- 2.3、向量的混合积
- 2.3.1、定义
- 2.3.2、几何意义
- 2.3.3、混合积的坐标表示
- 2.3.4、性质
1、向量的概念及其线性运算
1.1、向量的概念
向量:既有大小,又有方向的量称为向量(又称矢量)
表示法:有向线段 M 1 M 2 ⃗ \vec{M_1M_2} M1M2或 a ⃗ , \vec{a}, a,或 a a a
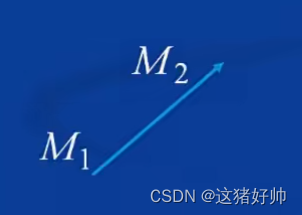
向量的模:向量的大小,记作 ∣ M 1 M 2 ⃗ ∣ , |\vec{M_1M_2}|, ∣M1M2∣,或 ∣ a ⃗ ∣ , |\vec{a}|, ∣a∣,或 ∣ a ∣ |a| ∣a∣
自由向量:与起点无关的向量
单位向量:模为1的向量,记作 e ⃗ \vec{e} e或e
零向量:模为0的向量,记作 0 ⃗ \vec{0} 0或0
若向量 a ⃗ \vec{a} a与向量 b ⃗ \vec{b} b大小相等,方向相同,则称 a ⃗ \vec{a} a与向量 b ⃗ \vec b b相等,记作 a ⃗ = b ⃗ \vec a = \vec b a=b
若向量 a ⃗ \vec a a与 b ⃗ \vec b b方向相同或相反,则称 a ⃗ \vec a a 与 b ⃗ \vec b b平行,记作 a ⃗ / / b ⃗ \vec a//\vec b a//b
规定:零向量与任何向量平行
与 a ⃗ \vec a a的模相同,但方向相反的向量称为 a ⃗ \vec a a的负向量,记作 − a ⃗ -\vec a −a
因平行向量可平移到同一直线上,故两向量平行又称两向量共线
若 k ( ≥ 3 ) k(\geq 3) k(≥3)个向量经平移可移到同一平面上,则称此 k k k个向量共面
1.2、向量的线性运算
1.2.1、向量的加法
平行四边形法则:
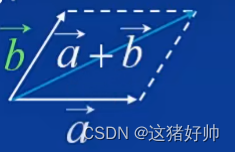
如图: a ⃗ + b ⃗ = \vec a + \vec b= a+b=平行四边形对角线
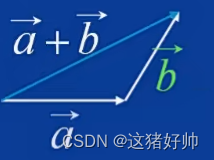
因为如果把 b ⃗ \vec b b的起点平移到 a ⃗ \vec a a的终点就是 a ⃗ + b ⃗ \vec a + \vec b a+b,所以也就可以得到三角形法则
三角形法则:
运算规律:
1、交换律 a ⃗ + b ⃗ = b ⃗ + a ⃗ \vec a + \vec b = \vec b + \vec a a+b=b+a
2、结合律 ( a ⃗ + b ⃗ ) + c ⃗ = a ⃗ + ( b ⃗ + c ⃗ ) = a ⃗ + b ⃗ + c ⃗ (\vec a + \vec b)+\vec c = \vec a +(\vec b + \vec c)=\vec a + \vec b + \vec c (a+b)+c=a+(b+c)=a+b+c
1.2.2、向量的减法
b ⃗ − a ⃗ = b ⃗ + ( − a ⃗ ) \vec b -\vec a=\vec b +(-\vec a) b−a=b+(−a)
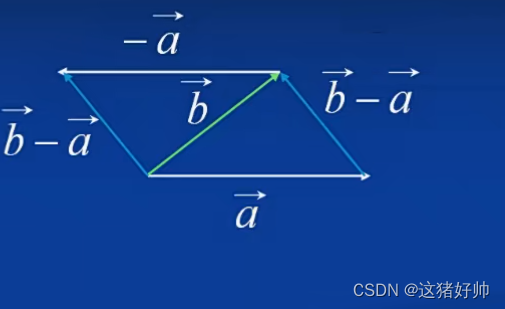
特别当 b ⃗ = a ⃗ \vec b = \vec a b=a时,有 a ⃗ − a ⃗ = a ⃗ + ( − a ⃗ ) = 0 ⃗ \vec a-\vec a = \vec a + (-\vec a)=\vec 0 a−a=a+(−a)=0
1.2.3、向量与数的乘法
λ \lambda λ是一个数, λ \lambda λ与 a ⃗ \vec a a的乘积是一个新向量,记作 λ a ⃗ \lambda \vec a λa
规定:
λ > 0 \lambda >0 λ>0时, λ a ⃗ \lambda\vec a λa与 a ⃗ \vec a a同向, ∣ λ a ⃗ ∣ = λ ∣ a ⃗ ∣ |\lambda\vec a|=\lambda|\vec a| ∣λa∣=λ∣a∣
λ < 0 \lambda <0 λ<0时, λ a ⃗ \lambda\vec a λa与 a ⃗ \vec a a反向, ∣ λ a ⃗ ∣ = − λ ∣ a ⃗ ∣ |\lambda\vec a|=-\lambda|\vec a| ∣λa∣=−λ∣a∣
λ = 0 \lambda = 0 λ=0时, λ a ⃗ = 0 ⃗ \lambda\vec a=\vec 0 λa=0
总之: ∣ λ a ⃗ ∣ = ∣ λ ∣ ∣ a ⃗ ∣ |\lambda \vec a|=|\lambda||\vec a| ∣λa∣=∣λ∣∣a∣
运算律:
结合律 λ ( μ a ⃗ ) = μ ( λ a ⃗ ) = λ μ a ⃗ \lambda(\mu\vec a)=\mu(\lambda \vec a)=\lambda\mu\vec a λ(μa)=μ(λa)=λμa
分配律: ( λ + μ ) a ⃗ = λ a ⃗ + μ a ⃗ (\lambda+\mu)\vec a=\lambda\vec a+\mu\vec a (λ+μ)a=λa+μa
λ ( a ⃗ + b ⃗ ) = λ a ⃗ + λ b ⃗ \lambda(\vec a + \vec b)=\lambda\vec a+\lambda \vec b λ(a+b)=λa+λb
若 a ⃗ ≠ b ⃗ , \vec a≠\vec b, a=b,则有单位向量 e ⃗ a = 1 ∣ a ⃗ ∣ a ⃗ \vec e_a=\frac{1}{|\vec a|}\vec a ea=∣a∣1a
定理:设 a ⃗ \vec a a为非零向量,则 a ⃗ / / b ⃗ ⇚ ⇛ b ⃗ = λ a ⃗ ( λ 为唯一实数 ) \vec a//\vec b\Lleftarrow\Rrightarrow\vec b=\lambda\vec a(\lambda为唯一实数) a//b⇚⇛b=λa(λ为唯一实数)
1.3、空间直角坐标系
1.3.1、空间直角坐标系的基本概念
过空间一定点 O , O, O,由三条互相垂直的数轴按右手规则组成一个空间直角坐标系
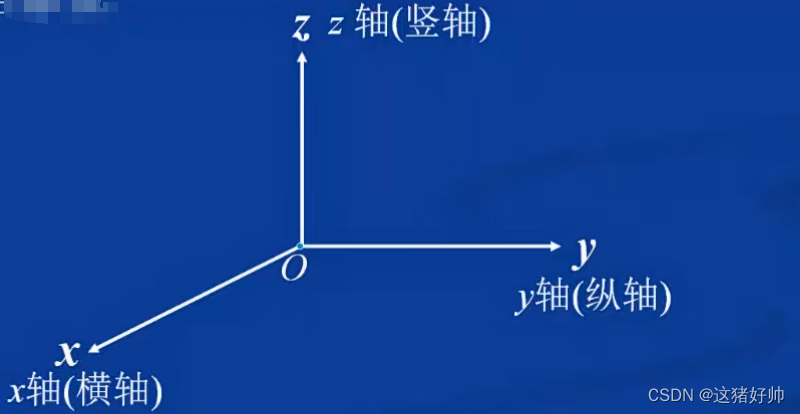
其中点 O O O为坐标原点
x / y / z x/y/z x/y/z轴称为坐标轴
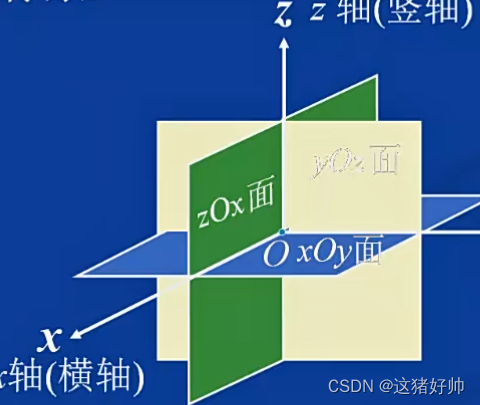
上面三个面称为坐标面
x x x轴与 y y y轴所决定的面称为 x O y xOy xOy面
x x x轴与 z z z轴所决定的面称为 z O x zOx zOx面
y y y轴与 z z z轴所决定的面称为 y O x yOx yOx面
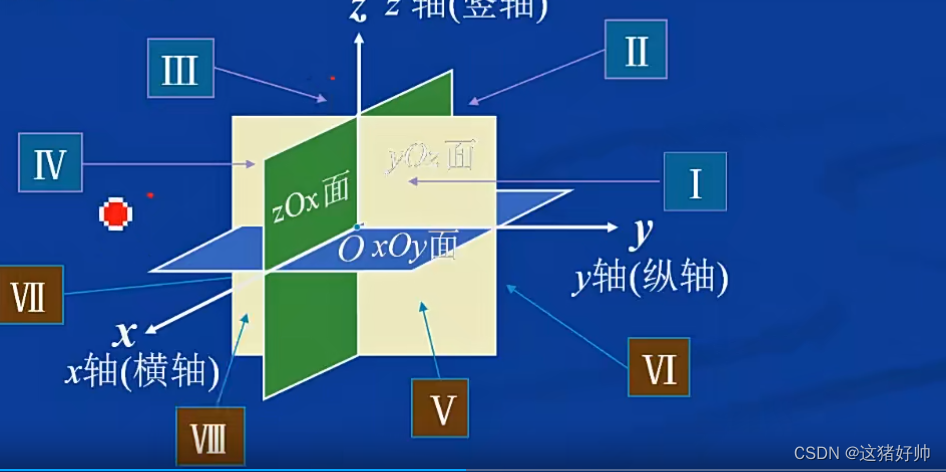
卦限:上面的三个面就把整个空间分成了8个部分,所以卦限就有八个
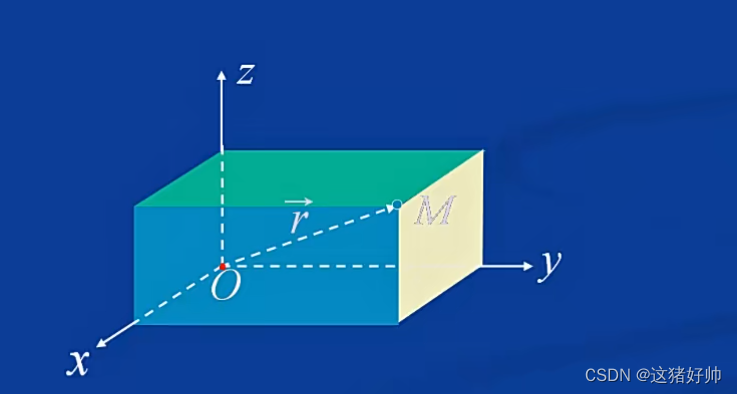
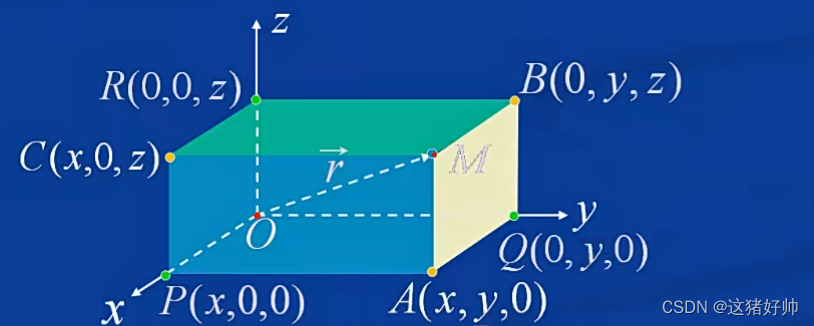
在空间直角坐标系中,给一点 M M M,点M的坐标即为 ( x , y , z ) (x,y,z) (x,y,z)
并且这个坐标也就是为从原点 O O O出发到 M M M点的一个向量 r ⃗ \vec r r, r ⃗ \vec r r我们称为向径
如图:
特殊点的坐标:
原点 O ( 0 , 0 , 0 ) O(0,0,0) O(0,0,0)
坐标轴上的点 P , Q , R P,Q,R P,Q,R
坐标面上的点 A , B , C A,B,C A,B,C
坐标面:
x O y xOy xOy面上的点的方程: z = 0 , z=0, z=0,也就是 z = 0 z=0 z=0的所有点构成的面就是 x O y xOy xOy面
y O z yOz yOz面上的点的方程: x = 0 , x=0, x=0,也就是 x = 0 x=0 x=0的所有点构成的面就是 y O z yOz yOz面
z O x zOx zOx面上的点的方程: y = 0 , y=0, y=0,也就是 y = 0 y=0 y=0的所有点构成的面就是 z O x zOx zOx面
坐标轴:
x 轴上的点: y = 0 , z = 0 x轴上的点:y=0,z=0 x轴上的点:y=0,z=0
y 轴上的点: x = 0 , z = 0 y轴上的点:x=0,z=0 y轴上的点:x=0,z=0
z 轴上的点: y = 0 , x = 0 z轴上的点:y=0,x=0 z轴上的点:y=0,x=0
1.3.2、向量的坐标表示
在空间直角坐标系下,任意向量 r ⃗ \vec r r可用向径 O M ⃗ \vec{OM} OM表示
以 i ⃗ , j ⃗ , k ⃗ \vec i,\vec j,\vec k i,j,k分别表示 x , y , z x,y,z x,y,z轴上的单位向量

设点 M M M的坐标为 M ( x , y , z ) M(x,y,z) M(x,y,z)则 r ⃗ = O M ⃗ = O N ⃗ + N M ⃗ = O A ⃗ + O B ⃗ + O C ⃗ = x i ⃗ + y j ⃗ + z k ⃗ \vec r=\vec{OM}=\vec{ON}+\vec{NM}=\vec{OA}+\vec{OB}+\vec{OC}=x\vec{i}+y\vec{j}+z\vec{k} r=OM=ON+NM=OA+OB+OC=xi+yj+zk
则 r ⃗ = x i ⃗ + y j ⃗ + z k ⃗ , \vec{r}=x\vec i+y\vec j+z\vec k, r=xi+yj+zk,记为 ( x , y , z ) (x,y,z) (x,y,z)
此式称为向量 r ⃗ \vec r r的坐标分解式, x i ⃗ , y j ⃗ , z k ⃗ x\vec i,y\vec j,z\vec k xi,yj,zk称为向量 r ⃗ \vec r r沿三个坐标轴方向的分向量
如图: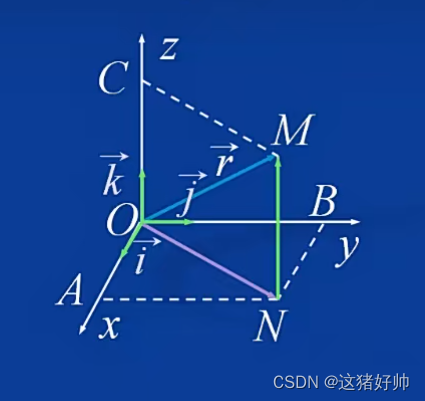
1.4、利用坐标作向量的线性运算
设 a ⃗ = ( a x , a y , a z ) , b ⃗ = ( b x , b y , b z ) , λ \vec a=(a_x,a_y,a_z),\vec b=(b_x,b_y,b_z),\lambda a=(ax,ay,az),b=(bx,by,bz),λ为实数,则 a ⃗ ± b ⃗ = ( a x ± b x , a y ± b y , a z ± b z ) λ a ⃗ = ( λ a x , λ a y , λ a z ) \vec a\pm\vec b=(a_x\pm b_x,a_y\pm b_y,a_z \pm b_z)\\\lambda\vec a=(\lambda a_x,\lambda a_y,\lambda a_z) a±b=(ax±bx,ay±by,az±bz)λa=(λax,λay,λaz)
平行向量对应坐标成比例:
当 a ⃗ ≠ 0 ⃗ \vec a≠\vec 0 a=0时, b ⃗ / / a ⃗ ⇚ ⇛ b ⃗ = λ a ⃗ ⇚ ⇛ b x a x = b y a y = b z a z = λ \vec b // \vec a\Lleftarrow\Rrightarrow \vec b=\lambda \vec a\Lleftarrow\Rrightarrow\frac{b_x}{a_x}=\frac{b_y}{a_y}=\frac{b_z}{a_z}=\lambda b//a⇚⇛b=λa⇚⇛axbx=ayby=azbz=λ
1.5、向量的模、方向角、投影
1.5.1、向量的模与两点间距离公式
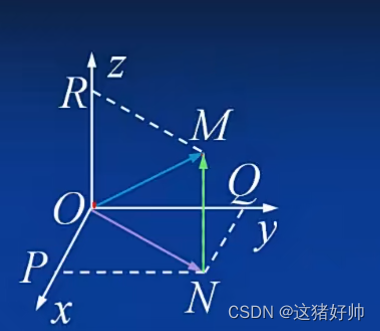
设 r ⃗ = ( x , y , z ) , \vec r=(x,y,z), r=(x,y,z),作 O M ⃗ = r ⃗ , \vec{OM}=\vec r, OM=r,则有 r ⃗ = O M ⃗ = O P ⃗ + O Q ⃗ + O R ⃗ \vec r=\vec{OM}=\vec{OP}+\vec{OQ}+\vec{OR} r=OM=OP+OQ+OR
由勾股定理得:
∣ r ⃗ ∣ = ∣ O M ∣ = ∣ O P ∣ 2 + ∣ O Q ∣ 2 + ∣ O R ∣ 2 = x 2 + y 2 + z 2 |\vec r|=|OM|=\sqrt{|OP|^2+|OQ|^2+|OR|^2}=\sqrt{x^2+y^2+z^2} ∣r∣=∣OM∣=∣OP∣2+∣OQ∣2+∣OR∣2=x2+y2+z2
对两点 A ( x 1 , y 1 , z 1 ) A(x_1,y_1,z_1) A(x1,y1,z1)与 B ( x 2 , y 2 , z 2 ) , B(x_2,y_2,z_2), B(x2,y2,z2),因 A B ⃗ = O B ⃗ − O A ⃗ = ( x 2 − x 1 , y 2 − y 1 , z 2 − z 1 ) \vec{AB}=\vec{OB}-\vec{OA}=(x_2-x_1,y_2-y_1,z_2-z_1) AB=OB−OA=(x2−x1,y2−y1,z2−z1)
得两点间距离公式: ∣ A B ∣ = ∣ A B ⃗ ∣ = ( x 2 − x 1 ) 2 + ( y 2 − y 1 ) 2 + ( z 2 − z 1 ) 2 |AB|=|\vec{AB}|=\sqrt{(x_2-x_1)^2+(y_2-y_1)^2+(z_2-z_1)^2} ∣AB∣=∣AB∣=(x2−x1)2+(y2−y1)2+(z2−z1)2
1.5.2、方向角与方向余弦
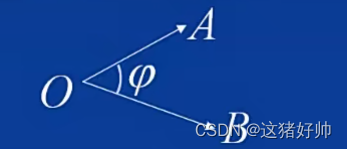
设有两非零向量 a ⃗ , b ⃗ , \vec a,\vec b, a,b,任取空间一点 O , O, O,作 O A ⃗ = a ⃗ , O B ⃗ = b ⃗ , \vec{OA}=\vec a,\vec{OB}=\vec b, OA=a,OB=b,称 φ = ∠ A O B ( 0 ≤ φ ≤ π ) φ=\angle AOB(0\leqφ\leq \pi) φ=∠AOB(0≤φ≤π)为向量 a ⃗ , b ⃗ \vec a,\vec b a,b的夹角
类似可定义向量与轴,轴与轴的夹角
给定 r ⃗ = ( x , y , z ) ≠ 0 ⃗ , \vec r=(x,y,z)≠\vec 0, r=(x,y,z)=0,称 r ⃗ \vec r r与三坐标轴的夹角 α , β , γ \alpha,\beta,\gamma α,β,γ为其方向角
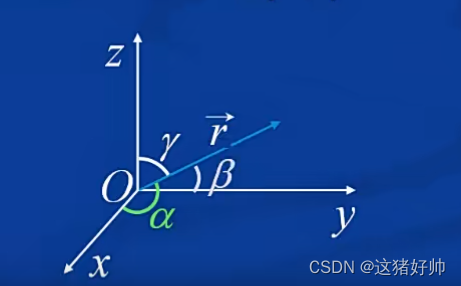
方向角的余弦称其为方向余弦: cos α = x ∣ r ⃗ ∣ = x x 2 + y 2 + z 2 cos β = y ∣ r ⃗ ∣ = x x 2 + y 2 + z 2 cos γ = z ∣ r ⃗ ∣ = z x 2 + y 2 + z 2 \cos\alpha=\frac{x}{|\vec r|}=\frac{x}{\sqrt{x^2+y^2+z^2}}\\\cos\beta=\frac{y}{|\vec r|}=\frac{x}{\sqrt{x^2+y^2+z^2}}\\\cos\gamma=\frac{z}{|\vec r|}=\frac{z}{\sqrt{x^2+y^2+z^2}} cosα=∣r∣x=x2+y2+z2xcosβ=∣r∣y=x2+y2+z2xcosγ=∣r∣z=x2+y2+z2z
方向余弦的性质: cos 2 α + cos 2 β + cos 2 γ = 1 \cos^2\alpha+\cos^2\beta+\cos^2\gamma=1 cos2α+cos2β+cos2γ=1
向量 r ⃗ \vec r r的单位向量: e ⃗ r = r ⃗ ∣ r ⃗ ∣ = ( cos α , cos β , cos γ ) \vec e_r=\frac{\vec r}{|\vec r|}=(\cos\alpha,\cos\beta,\cos\gamma) er=∣r∣r=(cosα,cosβ,cosγ)
1.5.3、向量在轴上的投影
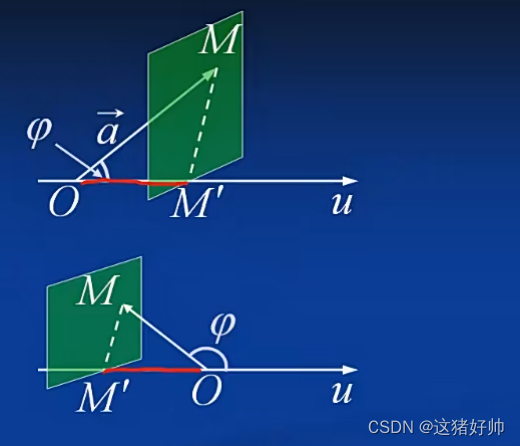
设 a ⃗ \vec a a与 u u u轴正向的夹角为 φ , φ, φ,则 a ⃗ \vec a a在轴 u u u上的投影为 ∣ a ⃗ ∣ cos φ |\vec a|\cos φ ∣a∣cosφ
记为: P r j u a ⃗ Prj_u\vec a Prjua或 ( a ⃗ ) u , (\vec a)_u, (a)u,即:
( a ⃗ ) u = ∣ a ⃗ ∣ cos φ (\vec a)_u=|\vec a|\cos φ (a)u=∣a∣cosφ
例如: a ⃗ = ( a x , a y , a z ) \vec a=(a_x,a_y,a_z) a=(ax,ay,az)在坐标轴上的投影分别为 a x , a y , a z a_x,a_y,a_z ax,ay,az
投影的性质:
1、 ( a ⃗ + b ⃗ ) u = ( a ⃗ ) u + ( b ⃗ ) u (\vec a+\vec b)_u=(\vec a)_u+(\vec b)_u (a+b)u=(a)u+(b)u
2、 ( λ a ⃗ ) u = λ ( a ⃗ ) u , (\lambda\vec a)_u=\lambda(\vec a)_u, (λa)u=λ(a)u, ( λ 为实数 ) (\lambda为实数) (λ为实数)
2、数量积、向量积、混合积
2.1、两向量的数量积
2.1.1、引例
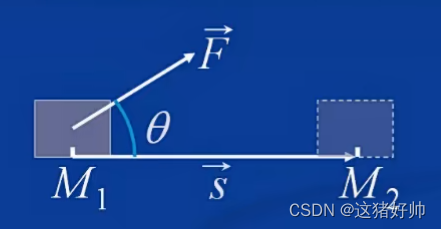
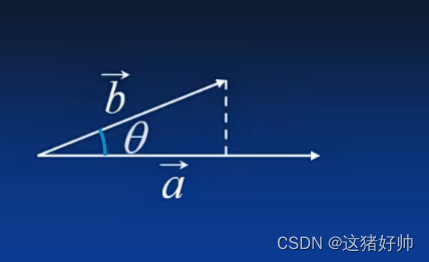
设一物体在常力 F ⃗ \vec F F作用下,沿与力夹角为 θ \theta θ的直线移动,位移为 s ⃗ \vec s s,则力 F ⃗ \vec F F所做的功为 W = ∣ F ⃗ ∣ ∣ s ⃗ ∣ cos θ W=|\vec F||\vec s|\cos\theta W=∣F∣∣s∣cosθ
由于这种量使用的非常多,所以数学中就给出了如下定义
2.1.2、定义
设向量 a ⃗ , b ⃗ \vec a,\vec b a,b的夹角为 θ , \theta, θ,称 ∣ a ⃗ ∣ ∣ b ⃗ ∣ cos θ ,记作: a ⃗ ⋅ b ⃗ |\vec a||\vec b|\cos\theta,记作:\vec a·\vec b ∣a∣∣b∣cosθ,记作:a⋅b
为 a ⃗ \vec a a与 b ⃗ \vec b b的数量积(点积)
有了此定义,则引例中的式子即可写为: F ⃗ ⋅ s ⃗ \vec F·\vec s F⋅s
当 a ⃗ ≠ 0 ⃗ \vec a≠\vec 0 a=0时, b ⃗ \vec b b在 a ⃗ \vec a a上的投影为 ∣ b ⃗ ∣ cos θ = P r j a ⃗ b ⃗ |\vec b|\cos\theta=Prj_{\vec a}\vec b ∣b∣cosθ=Prjab
∴ a ⃗ ⋅ b ⃗ = ∣ a ⃗ ∣ P r j a ⃗ b ⃗ ∴\vec a·\vec b=|\vec a|Prj_{\vec a}\vec b ∴a⋅b=∣a∣Prjab
同理,当 b ⃗ ≠ 0 ⃗ \vec b≠\vec 0 b=0时,
a ⃗ ⋅ b ⃗ = ∣ b ⃗ ∣ P r j b ⃗ a ⃗ \vec a·\vec b=|\vec b|Prj_{\vec b}\vec a a⋅b=∣b∣Prjba
2.1.3、性质
( 1 ) a ⃗ ⋅ a ⃗ = ∣ a ⃗ ∣ 2 (1) \vec a·\vec a=|\vec a|^2 (1)a⋅a=∣a∣2
( 2 ) a ⃗ , b ⃗ (2) \vec a,\vec b (2)a,b为两个非零向量,则有 a ⃗ ⋅ b ⃗ = 0 ⇚ ⇛ a ⃗ ⊥ b ⃗ \vec a·\vec b=0\Lleftarrow\Rrightarrow\vec a⊥\vec b a⋅b=0⇚⇛a⊥b
2.1.4、运算律
(1)、交换律: a ⃗ ⋅ b ⃗ = b ⃗ ⋅ a ⃗ \vec a·\vec b=\vec b·\vec a a⋅b=b⋅a
(2)、结合律 ( λ , μ 为实数 ) (\lambda,\mu为实数) (λ,μ为实数):
( λ a ⃗ ) ⋅ b ⃗ = a ⃗ ⋅ ( λ b ⃗ ) = λ ( a ⃗ ⋅ b ⃗ ) (\lambda\vec a)·\vec b=\vec a·(\lambda\vec b)=\lambda(\vec a·\vec b) (λa)⋅b=a⋅(λb)=λ(a⋅b)
( λ a ⃗ ) ⋅ ( μ b ⃗ ) = λ ( a ⃗ ⋅ ( μ λ b ) ) = λ μ ( a ⃗ ⋅ b ⃗ ) (\lambda\vec a)·(\mu\vec b)=\lambda(\vec a·(\mu\lambda b))=\lambda\mu(\vec a·\vec b) (λa)⋅(μb)=λ(a⋅(μλb))=λμ(a⋅b)
(3)、分配律: ( a ⃗ + b ⃗ ) ⋅ c ⃗ = a ⃗ ⋅ c ⃗ + b ⃗ ⋅ c ⃗ (\vec a+\vec b)·\vec c=\vec a·\vec c+\vec b·\vec c (a+b)⋅c=a⋅c+b⋅c
2.1.5、数量积的坐标表示
设 a ⃗ = a x i ⃗ + a y j ⃗ + a z k ⃗ \vec a=a_x\vec i+a_y\vec j+a_z\vec k a=axi+ayj+azk
b ⃗ = b x i ⃗ + b y j ⃗ + b z k ⃗ \vec b=b_x\vec i+b_y\vec j+b_z\vec k b=bxi+byj+bzk
则:
a ⃗ ⋅ b ⃗ = ( a x i ⃗ + a y j ⃗ + a z k ⃗ ) ⋅ ( b x i ⃗ + b y j ⃗ + b z k ⃗ ) \vec a·\vec b=(a_x\vec i+a_y\vec j+a_z\vec k)·(b_x\vec i+b_y\vec j+b_z\vec k) a⋅b=(axi+ayj+azk)⋅(bxi+byj+bzk)
由于 i ⃗ ⋅ i ⃗ = j ⃗ ⋅ j ⃗ = k ⃗ ⋅ k ⃗ = 1 \vec i·\vec i=\vec j·\vec j=\vec k·\vec k=1 i⋅i=j⋅j=k⋅k=1
且 i ⃗ ⋅ j ⃗ = j ⃗ ⋅ k ⃗ = i ⃗ ⋅ k ⃗ = 0 \vec i·\vec j=\vec j·\vec k=\vec i·\vec k=0 i⋅j=j⋅k=i⋅k=0
∴ a ⃗ ⋅ b ⃗ = a x b x + a y b y + a z b z ∴\vec a·\vec b=a_xb_x+a_yb_y+a_zb_z ∴a⋅b=axbx+ayby+azbz
两向量的夹角公式:
当 a ⃗ , b ⃗ \vec a,\vec b a,b为非零向量时,由于 a ⃗ ⋅ b ⃗ = ∣ a ⃗ ∣ ∣ b ⃗ ∣ cos θ \vec a·\vec b=|\vec a||\vec b|\cos\theta a⋅b=∣a∣∣b∣cosθ
∴ cos θ = a ⃗ ⋅ b ⃗ ∣ a ⃗ ∣ ∣ b ⃗ ∣ = a x b x + a y b y + a z b z a x 2 + a y 2 + a z 2 b x 2 + b y 2 + b z 2 ∴\cos\theta=\frac{\vec a·\vec b}{|\vec a||\vec b|}=\frac{a_xb_x+a_yb_y+a_zb_z}{\sqrt{a^2_x+a_y^2+a_z^2}\sqrt{b_x^2+b_y^2+b_z^2}} ∴cosθ=∣a∣∣b∣a⋅b=ax2+ay2+az2bx2+by2+bz2axbx+ayby+azbz
2.2、两向量的向量积
2.2.1、定义
设 a ⃗ , b ⃗ \vec a,\vec b a,b的夹角为 θ \theta θ,定义:
向量 c ⃗ \vec c c的方向: c ⃗ ⊥ a ⃗ , c ⃗ ⊥ b ⃗ \vec c⊥\vec a,\vec c⊥\vec b c⊥a,c⊥b且符合右手规则
向量 c ⃗ \vec c c的模: ∣ c ⃗ ∣ = ∣ a ⃗ ∣ ∣ b ⃗ ∣ sin θ |\vec c|=|\vec a||\vec b|\sin\theta ∣c∣=∣a∣∣b∣sinθ
称 c ⃗ \vec c c为向量 a ⃗ \vec a a与 b ⃗ \vec b b的向量积,记作 c ⃗ = a ⃗ × b ⃗ ( 叉积 ) \vec c=\vec a\times\vec b(叉积) c=a×b(叉积)
几何意义:
如图
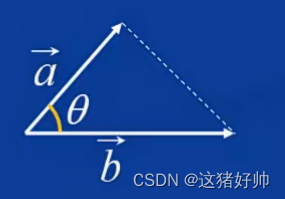
S = 1 2 ∣ a ⃗ × b ⃗ ∣ S=\frac{1}{2}|\vec a\times\vec b| S=21∣a×b∣或者等于以 a ⃗ , b ⃗ \vec a,\vec b a,b为邻边的平行四边形的面积
2.2.2、性质
(1)、 a ⃗ × a ⃗ = 0 ⃗ \vec a\times\vec a=\vec 0 a×a=0
(2)、 a ⃗ , b ⃗ \vec a,\vec b a,b为非零向量,则 a ⃗ × b ⃗ = 0 ⃗ ⇚ ⇛ a ⃗ / / b ⃗ \vec a\times\vec b=\vec 0\Lleftarrow\Rrightarrow\vec a//\vec b a×b=0⇚⇛a//b
【证明】
a ⃗ × b ⃗ = 0 ⇚ ⇛ ∣ a ⃗ ∣ ∣ b ⃗ ∣ sin θ = 0 ⇚ ⇛ sin θ = 0 \vec a\times \vec b=0\Lleftarrow\Rrightarrow|\vec a||\vec b|\sin\theta=0\Lleftarrow\Rrightarrow\sin\theta=0 a×b=0⇚⇛∣a∣∣b∣sinθ=0⇚⇛sinθ=0
即: θ = 0 / θ = π ⇚ ⇛ a ⃗ / / b ⃗ \theta=0/\theta=\pi\Lleftarrow\Rrightarrow\vec a//\vec b θ=0/θ=π⇚⇛a//b
2.2.3、运算律
a ⃗ × b ⃗ = − b ⃗ × a ⃗ \vec a\times\vec b=-\vec b\times \vec a a×b=−b×a
分配律: ( a ⃗ + b ⃗ ) × c ⃗ = a ⃗ × c ⃗ + b ⃗ × c ⃗ (\vec a+\vec b)\times \vec c=\vec a\times\vec c+\vec b\times\vec c (a+b)×c=a×c+b×c
结合律: ( λ a ⃗ ) × b ⃗ = a ⃗ × ( λ b ⃗ ) = λ ( a ⃗ × b ⃗ ) (\lambda\vec a)\times\vec b=\vec a\times(\lambda\vec b)=\lambda(\vec a\times\vec b) (λa)×b=a×(λb)=λ(a×b)
2.2.4、向量积的坐标表示
设 a ⃗ = a x i ⃗ + a y j ⃗ + a z k ⃗ \vec a=a_x\vec i+a_y\vec j+a_z\vec k a=axi+ayj+azk
b ⃗ = b x i ⃗ + b y j ⃗ + b z k ⃗ \vec b=b_x\vec i+b_y\vec j+b_z\vec k b=bxi+byj+bzk
则: a ⃗ × b ⃗ = ( a x i ⃗ + a y j ⃗ + a z k ⃗ ) × ( b x i ⃗ + b y j ⃗ + b z k ⃗ ) = ( a y b z − a z b y ) i ⃗ + ( a z b x − a x b z ) j ⃗ + ( a x b y − a y b x ) k ⃗ = i ⃗ j ⃗ k ⃗ a x a y a z b x b y b z \vec a\times\vec b=(a_x\vec i+a_y\vec j+a_z\vec k)\times(b_x\vec i+b_y\vec j+b_z\vec k)=(a_yb_z-a_zb_y)\vec i+(a_zb_x-a_xb_z)\vec j+(a_xb_y-a_yb_x)\vec k=\begin{matrix} \vec i & \vec j & \vec k\\ a_x & a_y & a_z\\ b_x & b_y & b_z\\ \end{matrix} a×b=(axi+ayj+azk)×(bxi+byj+bzk)=(aybz−azby)i+(azbx−axbz)j+(axby−aybx)k=iaxbxjaybykazbz
2.3、向量的混合积
2.3.1、定义
已知三向量 a ⃗ , b ⃗ , c ⃗ , \vec a,\vec b,\vec c, a,b,c,称数量 ( a ⃗ × b ⃗ ) ⋅ c ⃗ , 记作: [ a ⃗ b ⃗ c ⃗ ] (\vec a\times\vec b)·\vec c,记作:[\vec a~\vec b~ \vec c] (a×b)⋅c,记作:[a b c]
为 a ⃗ , b ⃗ , c ⃗ \vec a,\vec b,\vec c a,b,c的混合积
2.3.2、几何意义
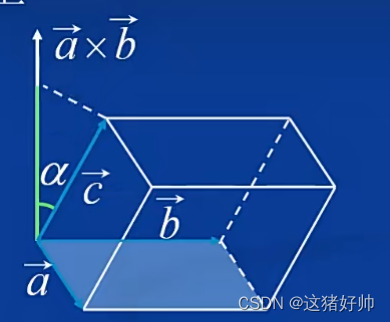
以 a ⃗ , b ⃗ , c ⃗ \vec a,\vec b,\vec c a,b,c为棱作平行六面体,则其 底面积 A = ∣ a ⃗ × b ⃗ ∣ , 高 h = ∣ c ⃗ ∣ ∣ cos α ∣ 底面积A=|\vec a\times \vec b|,高h=|\vec c||\cos\alpha| 底面积A=∣a×b∣,高h=∣c∣∣cosα∣
故平行六面体体积为 V = A h = ∣ a ⃗ × b ⃗ ∣ ∣ c ⃗ ∣ ∣ cos α ∣ = ∣ ( a ⃗ × b ⃗ ) ⋅ c ⃗ ∣ V=Ah=|\vec a\times \vec b||\vec c||\cos\alpha|=|(\vec a\times\vec b)·\vec c| V=Ah=∣a×b∣∣c∣∣cosα∣=∣(a×b)⋅c∣
2.3.3、混合积的坐标表示
设 a ⃗ = ( a x , a y , a z ) \vec a=(a_x,a_y,a_z) a=(ax,ay,az)
b ⃗ = ( b x , b y , b z ) \vec b=(b_x,b_y,b_z) b=(bx,by,bz)
c ⃗ = ( c x , c y , c z ) \vec c=(c_x,c_y,c_z) c=(cx,cy,cz)
[ a ⃗ b ⃗ c ⃗ ] = ( a ⃗ × b ⃗ ) ⋅ c ⃗ = a y a z b y b z c x − a x a z b x b z c y + a x a y b x b y c z = a x a y a z b x b y b z c x c y c z [\vec a~\vec b~\vec c]=(\vec a\times\vec b)·\vec c=\begin{matrix} a_y & a_z\\ b_y & b_z \\ \end{matrix}c_x-\begin{matrix} a_x & a_z\\ b_x & b_z \\ \end{matrix}c_y+\begin{matrix} a_x & a_y\\ b_x & b_y \\ \end{matrix}c_z=\begin{matrix} a_x & a_y &a_z\\ b_x & b_y & b_z\\ c_x & c_y & c_z\\ \end{matrix} [a b c]=(a×b)⋅c=aybyazbzcx−axbxazbzcy+axbxaybycz=axbxcxaybycyazbzcz
2.3.4、性质
(1)、三个非零向量 a ⃗ , b ⃗ , c ⃗ \vec a,\vec b,\vec c a,b,c共面的充要条件是 [ a ⃗ b ⃗ c ⃗ ] = 0 [\vec a~\vec b~\vec c]=0 [a b c]=0
(2)、轮换对称性:
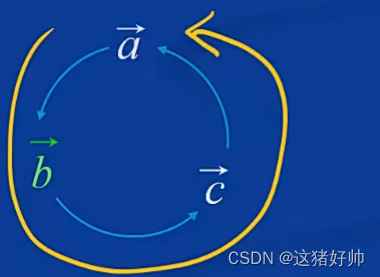
[ a ⃗ b ⃗ c ⃗ ] = [ b ⃗ c ⃗ a ⃗ ] = [ c ⃗ a ⃗ b ⃗ ] [\vec a~\vec b~\vec c]=[\vec b~\vec c~\vec a]=[\vec c~\vec a~\vec b] [a b c]=[b c a]=[c a b]
(可用三阶行列式推导)
这篇关于【高等数学】向量代数的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!







