本文主要是介绍【2023电赛】对于E题(运动目标控制)红色激光的简要回顾(四千字逐题分析,逐题相关代码),希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
不知不觉四天三夜已经过去了
虽然成绩不怎么样,但我觉得还是要留一些有用的文字给像我们一样 “没有人带路、没有老师指导、甚至是三个大一的团队” ,毕竟我们也是从头摸过来的,吃过不少亏。对于我们来说,互联网就是我们的老师,所以比赛结束后,思来想去我也才打算写这个文章来回顾一下比赛内容,也算是一种回馈了。同时也希望和我们一样“三无”的同学,看完之后能有点收获。

首先是看题目,我们在看到题目的时候也是觉得非常简单,觉得两天就能肝的差不多,然后搓了一天,和其他团队一样,死在了舵机精度上。解决方案如下:
1、购买高精度舵机(然而我们在哈尔滨,压根做不到开赛前完成到货+调试)
2、用差不多的舵机+代码硬上(我们最后是选择了这个方案)
3、拆电机改齿轮缩短有效范围来提高精度(这个其实是赛后才知道的)
因此最后我们还是选择了第二点,所以我们的代码也是基于你的舵机一般(但不至于sg90那么烂)用openmv控制的。
对于第一问和第二问,我不清楚如果选择树莓派或者jetson之类的高性能开发版+高清摄像头能不能有效识别铅笔印,我们手中视觉能用的目前只有openmv。我这边提供openmv的代码,首先可以用python的random函数还有python的pyb库当中的舵机驱动功能来提供一个随机的角度来完成第一项的初始位置到复位的过程。
import pyb,time #需要用的模块
pan = pyb.Servo(1)
tilt = pyb.Servo(2) #定义两个电机
#随机角度函数
def random_angle():pan.angle(random.randint(-90,90),1000)tilt.angle(random.randint(-90,90),1000)我们要知道,比赛前是会有20分钟的调试的(不让带电子设备,只能人工操作,也就是不能改代码),因此我们一二问直接写死!
我们设置按钮让他到左上角和中心,比赛前距离定死1米,然后比赛场地手动控制设备朝向对准左上角和中心 就可以了!!!我们放出其中回中的按钮,左上同理
from pyb import Pin
pin1 = Pin('P1', Pin.IN, Pin.PULL_UP) #p1作为复位按钮
def servoReset():spe_servoCtrl(-28,-21,1000) #写死!!!!!!!time.sleep(2)
##按键控制
while(True):pin1复位 = pin1.value() #读取按钮是否被触发if (pin1复位 == 0): #按钮控制!servoReset()'''
注意: 建议给按钮的杜邦线之间串联一个小电阻(几十欧几百欧都行),再串联一个瓷片电容,防止损坏单片机引脚和防止物理抖动引起多次触发!!!
'''对于三四题,这里就要用到视觉相关的了,首先我们要确定阈值才能够识别颜色,我们要确定目前要识别的主要是黑色的矩形靶纸和红色的激光,阈值需要你们利用openmv自带的阈值分析自行设置。同时你也需要通过简单的计算获得红色激光的中心,同时因为openmv最多也只能带的动QVGA,为了减少只标记四个矩形左上角所带来的风险,我们也要同时求出边框各个角两条外侧和内测中心的像素点位置,这里我们通过简单易懂的代码来给大家解释:
#全局变量
矩形左上角 = [0,0]
矩形左下角 = [0,0]
矩形右上角 = [0,0]
矩形右下角 = [0,0]
激光 = [0,0]
边缘优化是否完成 = 'No'
'''
开局进行25次扫描,因为题目二三题有说,启动的都是“运动目标控制系统”
我们只需要根据 “矩形优化是否完成” 就能知道是做第二题还是第三题了
缺点是二三题之间需要给机器重新上电来扫描是否有标靶
'''
while(wt < 25):print('进入检测方框模式')img = sensor.snapshot()img.lens_corr(1.8) #消除鱼眼畸变,如果没有鱼眼畸变的可以去掉for r in img.find_rects(threshold = 10000):#这里需要给矩形大小进行限制,否则会识别出各种怪东西,需要灵活调整if r.w() > 70 and r.h() > 40 and r.w()<100 and r.h()<70: # 在屏幕上框出矩形img.draw_rectangle(r.rect(), color = (255, 0, 0), scale = 4)# 获取矩形角点位置矩形左上角 = [r.x() , r.y()]矩形左下角 = [r.x() , r.y()+r.h()]矩形右上角 = [r.x()+r.w(), r.y()] 矩形右下角 = [r.x()+r.w(),r.y()+r.h()]if(矩形左上角[0]!=0 and 矩形左上角[1]!=0):wt = 25better()边缘优化是否完成 = 'Yes'print('边缘优化 成功')got = 0else:wt = wt+1#实时
while(True):clock.tick()img = sensor.snapshot()img.lens_corr(1.8)img.median(1, percentile=0.85) #滤波#实时获得激光坐标for b in img.find_blobs(red_td,pixels_threshold=2, area_threshold=2, merge=True,invert = 0,roi = roi):激光 = [(b.x()+b.w()+b.x())/2, (b.y()+b.h()+b.y())/2] #简单的像素块取中心
标靶四角优化如下, 原理非常简单:
#全局化变量
矩形左上角优化=[0,0]
矩形左下角优化=[0,0]
矩形右上角优化=[0,0]
矩形右下角优化=[0,0]#处理矩形四个角的函数
def better():for blk in img.find_blobs(blk_td,pixels_threshold=2, area_threshold=2, merge=True,invert = 0,roi = (矩形左上角[0]-7,矩形左上角[1]-7,14,14)):矩形左上角优化 = [(blk.x()+blk.w()+blk.x())/2, (blk.y()+blk.h()+blk.y())/2]for blk in img.find_blobs(blk_td,pixels_threshold=2, area_threshold=2, merge=True,invert = 0,roi = (矩形右上角[0]-7,矩形右上角[1]-7,14,14)):矩形右上角优化 = [(blk.x()+blk.w()+blk.x())/2, (blk.y()+blk.h()+blk.y())/2]for blk in img.find_blobs(blk_td,pixels_threshold=2, area_threshold=2, merge=True,invert = 0,roi = (矩形右下角[0]-7,矩形右下角[1]-7,14,14)):矩形右下角优化 = [(blk.x()+blk.w()+blk.x())/2, (blk.y()+blk.h()+blk.y())/2]for blk in img.find_blobs(blk_td,pixels_threshold=2, area_threshold=2, merge=True,invert = 0,roi = (矩形左下角[0]-7,矩形左下角[1]-7,14,14)):矩形左下角优化 = [(blk.x()+blk.w()+blk.x())/2, (blk.y()+blk.h()+blk.y())/2]
其实他的原理易懂,我们不需要代码,请看图: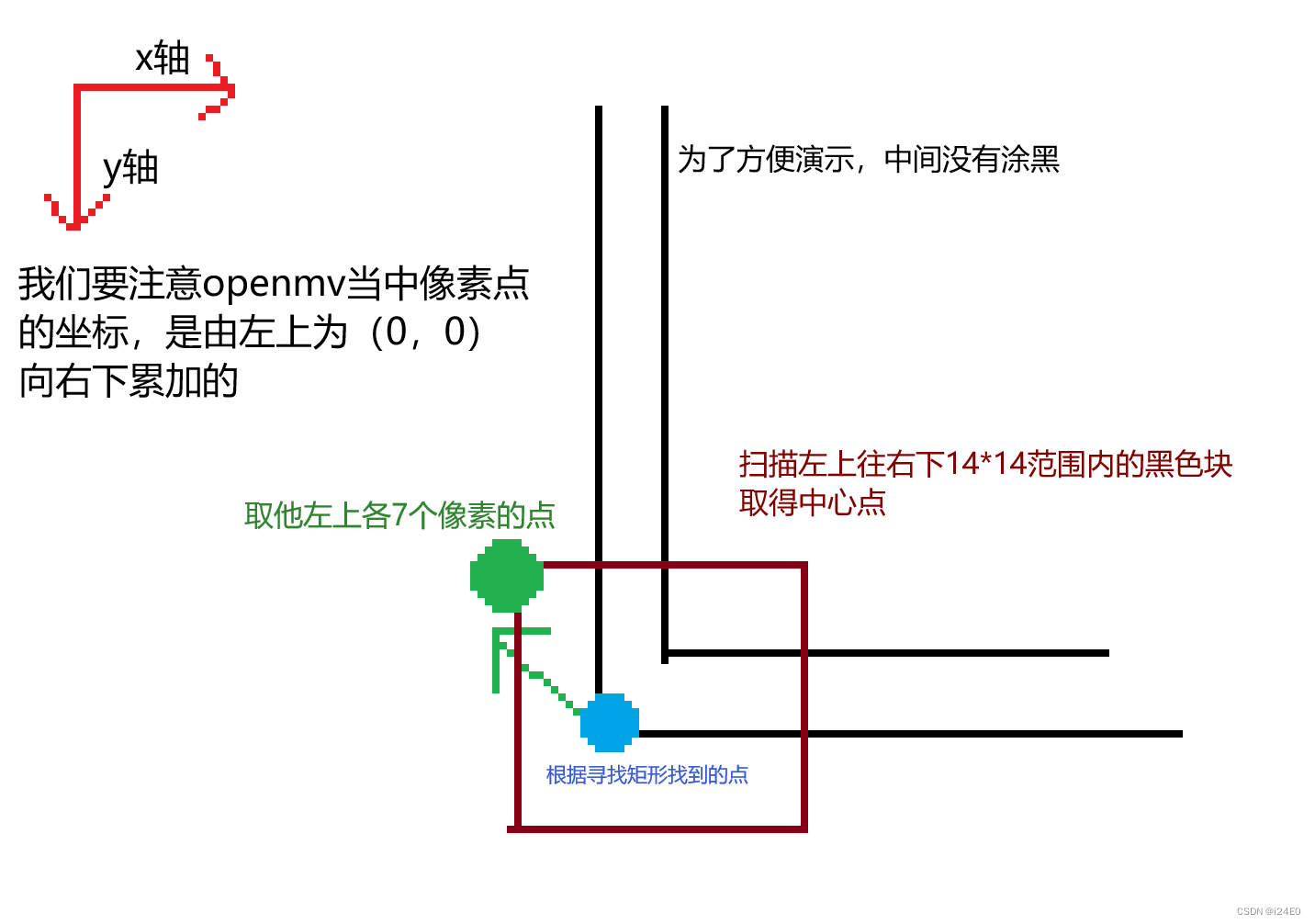
然后就是激动人心的巡线了,我们首先需要导入pid库,用的是openmv官方例程的 ---> pid库下载
巡线代码如下(部分,因为我们舵机精度不够,四个角的pid都是单独来回设置的,全发出来会很长)
pan_pid = PID(p=0.05, i=0.007,d = 0.001) #设置底盘和上部分别的pid,需要不断调试
tilt_pid = PID(p=0.03, i=0.006,d = 0.003)
pan_error = 激光[0]-(矩形左上角优化[0])
tilt_error = 激光[1]-(矩形左上角优化[1])
pan_output=pan_pid.get_pid(pan_error,1)
tilt_output=tilt_pid.get_pid(tilt_error,1)
pan_output = limt(pan_output,0.5)
tilt_output = limt(tilt_output,0.5)
panangle=panangle+pan_output
tiltangle=tiltangle-tilt_output#根据红点状况进行调整
if(abs(pan_error)>2):pan.angle(panangle,5)time.sleep_ms(5)
if(abs(tilt_error)>2):tilt.angle(tiltangle,5)time.sleep_ms(5)
if(当前状态 == 0 and abs(pan_error)<=2 and abs(tilt_error)<=2 ):time.sleep(1)got = 1print('已到达左上角 → 右上角')最后也希望大家有所收获吧,我也是编程小白,代码也不是很守规范,但也希望许多和我们一样的”三无“团队能吸收一下经验吧哈哈,算是反哺互联网了,希望能帮到您。
这篇关于【2023电赛】对于E题(运动目标控制)红色激光的简要回顾(四千字逐题分析,逐题相关代码)的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!





