电赛专题

电赛2024年H题智能小车基于MSPM0G3507主控MCU(利用8路灰度加上MPU6050的解决方式)具体项目报告
题目:自动行驶小车(H题) 摘要 本项目由微处理器MSPM0G3507,编码器电机驱动,8路灰度传感器指示线巡线单元,MPU6050六轴传感器无线直行单元,OLED显示人机互动单元,红色LED及蜂鸣器声光提示单元构成。系统运行由两部分组成:自动行驶小车的无指示线直行控制部分和有指示线弯道行驶的实时转向控制部分,小车的无指示线直行控制部分,由MPU6050六轴传感器获得小车姿态的偏航角,通过获得

电赛2024年H题智能小车基于MSPM0G3507主控MCU(利用8路灰度加上MPU6050的解决方式)
一.前言 前段时间,激烈的电赛刚刚结束,很荣幸啊,也是十分的不甘心,本次的湖北赛区H题只拿到了一个省二,看最终的排名,在H题中我们离省一也就差几名。但是整个比赛已经过去了,现在不甘与不舍,也没有任何意义了,只有接收这一现实了。 当时我们整个比赛要求一二三都完美完成,要求四能够十分稳定的跑下来但是跑完四圈得花1分30秒,大概是跑十次才死一两次的样子(毕竟比赛,谁也

关于电赛飞行器组要求中的不得有“无线通信及遥控”的思考与解决思路
飞控类型没有明确限制,和2019年国赛标准一致,依据往届经验,肯定更推荐用TI芯片方案,对携带遥控器、无线数传等设备有可能造成的违规作弊行为予以严令禁止,,有且进允许通过按键启动,这一点规定更加明确、清晰,避免去年国赛不同赛区对此要求认定模糊不清。 关键问题讨论: 下面给出无名创新提出的一种最简单又行之有效的与以往遥控器操作完全兼容的通过按键一件启动方案,这里拿
无名创新——2019年TI杯电赛飞行器赛题关键问题汇总
从2018年12月以来,无名创新TI飞控累计服务了全国高校累计超400个电赛飞行器学生团队,无名创新TI系列产品根据客户反馈、市场需求,完成了一次次软硬件迭代升级,比赛临近,针对近期客户担心是否能直接采用成品TI飞控开发板、TI整机二次开发学习平台用于比赛问题,下面给出客户提出的几种可能的情况,在展开讨论前,我们先列出前两年飞行器赛期的赛题要求。 无名创新客户获奖战报 无名创新TI飞控开源
电赛一等奖!基于TMS320F2812的简易数字频率计
电赛一等奖!简易数字频率计设计(原理图、PCB、源码、分析报告) 这份文件是关于合肥工业大学电气与自动化工程学院的一个项目报告,题目为“基于TMS320F2812的简易数字频率计”。项目由方敏、侯其立、李苗、张巧云四位本科生完成,指导教师为徐科军教授。以下是该项目报告的核心内容概述: 项目背景与目的: 频率测量在多个领域非常重要,因此高精度、宽量程的数字频率计成为了关键的测量

电赛经验分享——赛前准备
⏩ 大家好哇!我是小光,想要成为系统架构师的嵌入式爱好者。 ⏩在之前的电赛中取得了省一的成绩,本文对电赛比赛前需要准备什么做一个经验分享。 ⏩感谢你的阅读,不对的地方欢迎指正。 加入小光嵌入式交流群(qq群号:737327353)免费获取博主所有资料哦! 赛前准备 开发板的选择STM32MSPArduino树莓派 电源模块选择PCB制版中加入DCDC电源模块 硬件软件设计报告wor
备战电赛 | 集创赛提前练 • 第三周
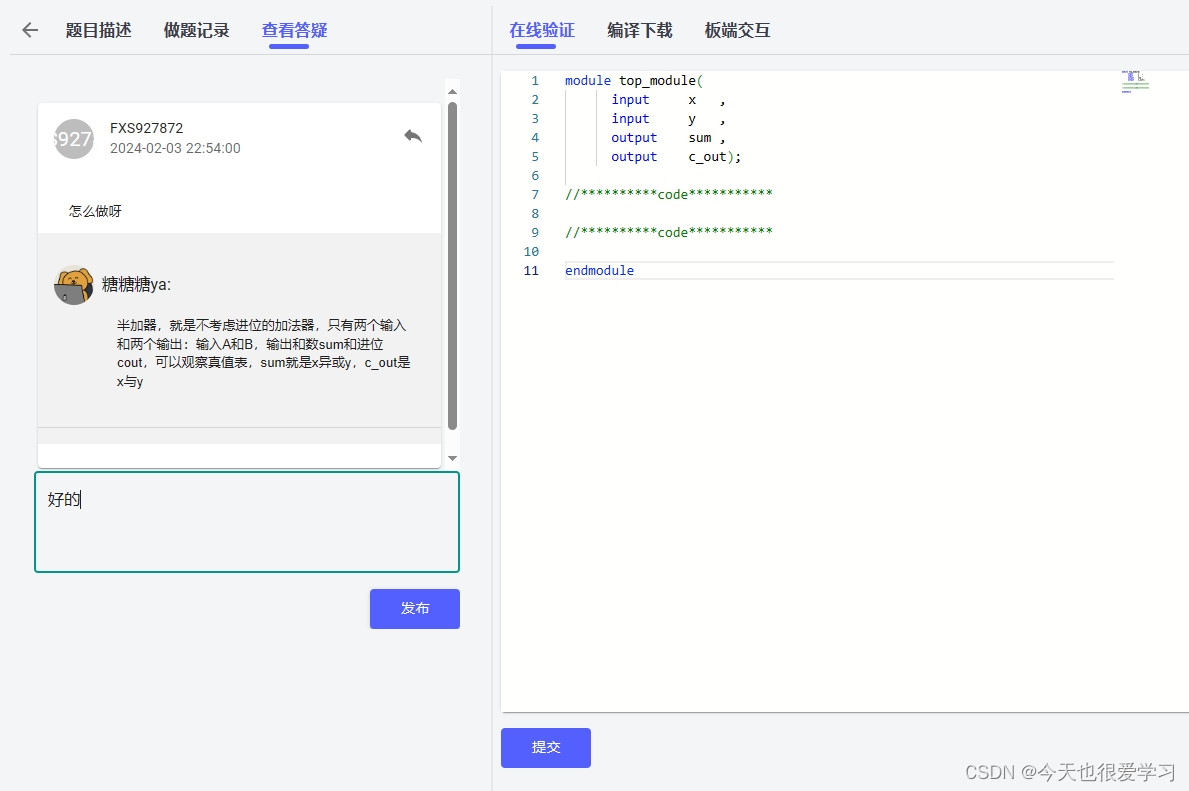
集创赛提前练 | 第三周 (点击下面的题目简介即可进入答题界面哦。) 题目一 题目难度:中等 题目二:请设计一个可以实现任意小数分频的时钟分频器,例如,8.7分频的时钟信号 题目难度:简单 题目三:请设计一个2输入的最大公因数计算器 题目难度:中等 题目四:请结合该算法和波形图设计一个8位整数的平方根计数器 题目难度:中等 提示:别忘记利用题目区“发

电赛MSP430知识小结
(转)今年的电赛对TI公司生产的MSP430系列的单片机进行了初步的学习,第一次参加电赛,知识量不足,所以在此对资料进行了总结,旨在留存一下知识,以便在今后的学习中,可以有所回忆,减少时间的消耗,算是见见同志第一个菜鸟篇学习日志,菜鸟先飞,也希望能帮助初学MSP430单片机的同学,仅仅适合初学者,且只介绍我涉及到的方面,谢谢大家支持原创。 我使用的是Launchpad MSP430G2553开发
以23年电赛吉林赛区为例,如何避免冤假错案?再谈无人机赛题中不让使用机载计算机的问题!!!
有同学反馈吉林赛区在无人机赛题中使用树莓派后不被允许测评,由于缺少同省样本支撑,并且吉林省G题无人机获得国奖仅有一组,所以仅根据特定情况做回复,不代表任何组委会立场,因为按照该用户表述,自己没有任何其他的违规行为,仅仅是因为使用了树莓派不让测试? 无名小哥回复:别的省英特尔nuc12/13 i5/i7都能用(典型的迷你PC主机,存在及大的擦边球嫌疑),测评还能进国测,如果没有其它违规
2022年电赛F题23年电赛D题-信号调制度测量装置说明中提到带通采样定律。
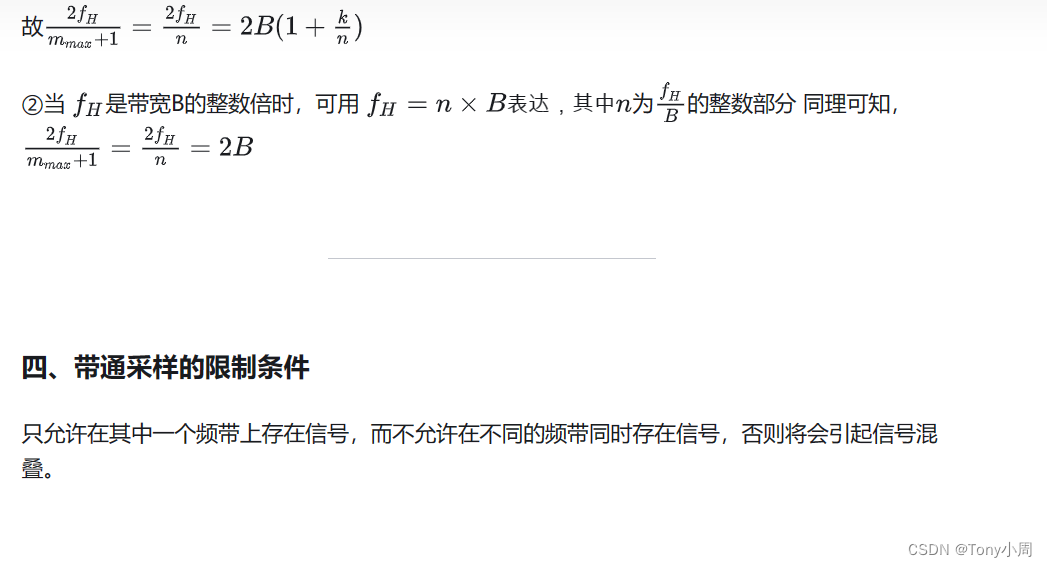
2022年电赛F题-信号调制度测量装置说明中提到带通采样定律。 23年电赛D题十分相似,但是22年载波达到了10M,根据奈奎斯特采样定理,我们知道想要分析出频谱不混叠的频谱图,采样率必须大于最大谐波的二倍。那么就意味着AD采样率要大于60Mhz。普通的32单片机明显达不到这个采样率。就拿F103芯片来说,板载AD采样率在正常工作范围内为1Mhz。如果使AD超频工作的化,也只能达到2.5Mhz,与

2023年电赛---运动目标控制与自动追踪系统(E题)关于网友的问题回复
如果有嵌入式企业需要招聘校园大使,湖南区域的日常实习,任何区域的暑假Linux驱动实习岗位,可C站直接私聊,或者邮件:zhangyixu02@gmail.com,此消息至2025年1月1日前均有效 前言 (1)各位私信问问题之前,看看自己的问题是不是在这个里面再问! (2) <1>2023年8月3日,10点25分。增加第三问的细节回答。 <2>2023年8月3日,10点45分。更新关于舵机安

2023 电赛E题--可能会出现的问题以及解决方法
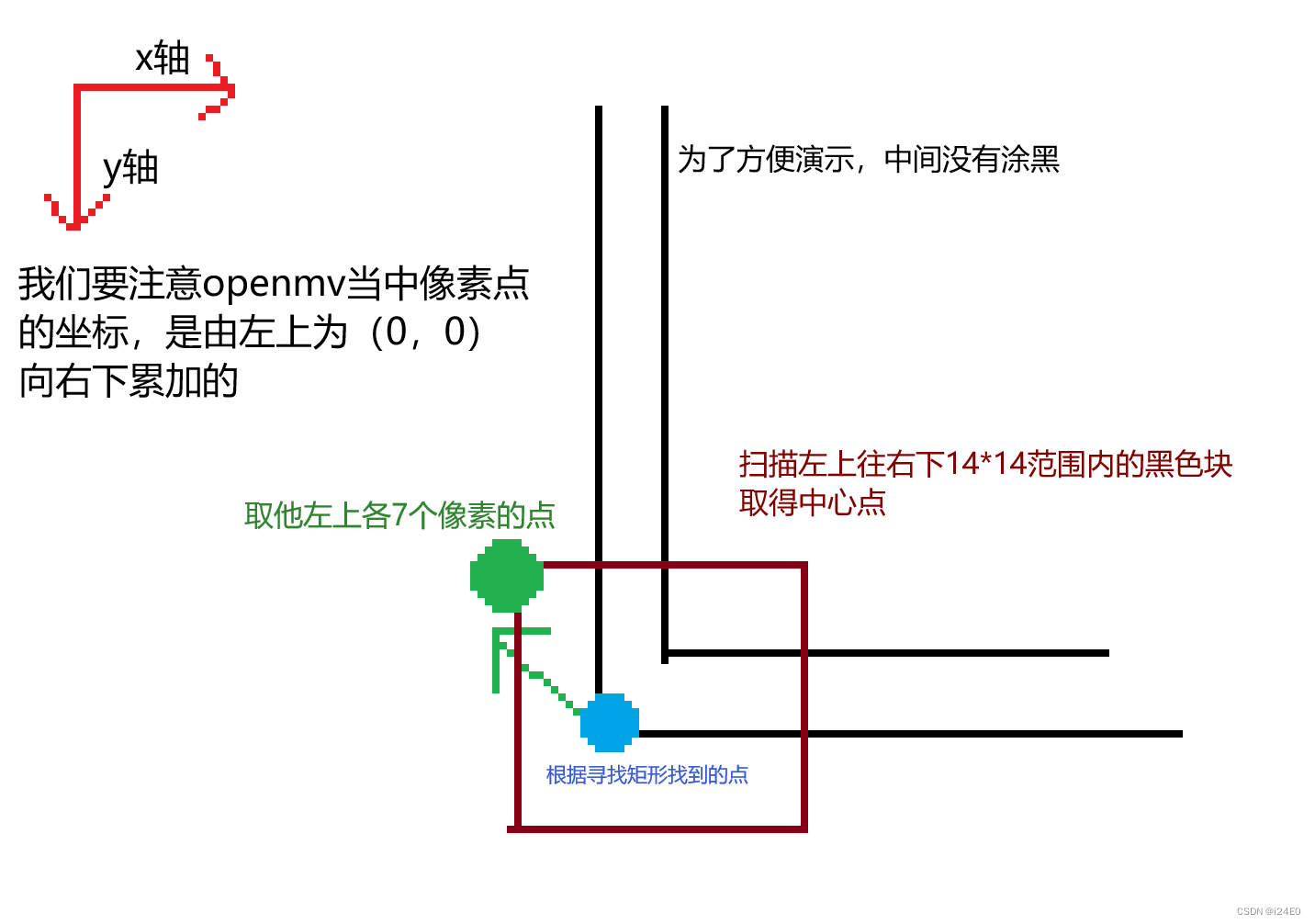
2023年电赛E题报告模板(K210版)--可直接使用 本文链接:2023年电赛E题报告模板(K210版)--可直接使用_皓悦编程记的博客-CSDN博客 解决激光笔在黑色区域无法识别 本文链接: 2023 电赛 E 题 激光笔识别有误--使用K210/Openmv/树莓派/Jetson nano实现激光笔在黑色区域的目标检测_牧子川的博客-CSDN博客 问题:第二题测量的pwm误差
2023年电赛cw32分享
2023年电赛E题开源分享 基于CW32的运动控制系统与自动追踪系统设计 (2023年全国大学生电子设计竞赛 E题) 全国大学生电子设计竞赛概述 全国大学生电子题计竞赛简介 全国大学生电子设计竞赛(National Undergraduate Electronics Design Contest,简称TI杯)是教育部和工信部共同发起的大学生学科竞赛之一,该竞赛面向大学生群众性科技活动
【2023电赛】对于E题(运动目标控制)红色激光的简要回顾(四千字逐题分析,逐题相关代码)
不知不觉四天三夜已经过去了 虽然成绩不怎么样,但我觉得还是要留一些有用的文字给像我们一样 “没有人带路、没有老师指导、甚至是三个大一的团队” ,毕竟我们也是从头摸过来的,吃过不少亏。对于我们来说,互联网就是我们的老师,所以比赛结束后,思来想去我也才打算写这个文章来回顾一下比赛内容,也算是一种回馈了。同时也希望和我们一样“三无”的同学,看完之后能有点收获。
2023电赛参赛感悟+H题思路+给萌新的建议
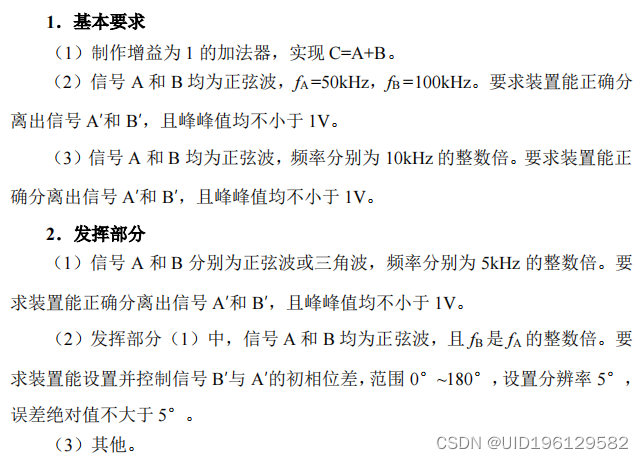
感悟分享 2023电赛终于落下了帷幕,经历了四天三夜的奋战,我们小组也取得了一个比较满意的成果——省二。这对于刚接触电赛的我们来说已经是一个很不错的结果了,虽然有一点小遗憾,不过大家整体都很满意。 2023H题思路 我们组选择的是H题:信号分离装置。据我所知,这道题我们学校选的人挺多的,别的学校选的人似乎也不少,所以竞争还是比较激烈的。 这道题的
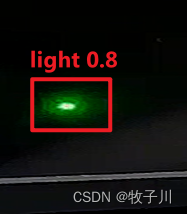
2023 电赛 E 题 激光笔识别有误--使用K210/Openmv/树莓派/Jetson nano实现激光笔在黑色区域的目标检测
1. 引言 1.1 激光笔在黑色区域目标检测的背景介绍 在许多应用领域,如机器人导航、智能家居和自动驾驶等,目标检测技术的需求日益增加。本博客将聚焦于使用K210芯片实现激光笔在黑色区域的目标检测。 激光笔在黑色区域目标检测是一个有趣且具有挑战性的问题。我们将通过使用K210芯片和相关算法,能够准确地检测出激光笔在黑色区域的位置和姿态,以便后续应用。 1.2 K210芯片的概述和优势 K

四、电赛TI官方LaunchPad板飞行器MSP432飞控解/上锁、功能模式操作教程
1、飞行器的解锁 左边遥杆处于右下角,持续1.5S左右,飞控会进入解锁状态,当解锁后,绿色指示灯会进行慢闪状态,解锁后6秒钟内,如果无推油、打杆动作,飞控会自动上锁,同时绿色指示灯会同步快闪3S。若解锁后6S内,有推油、打杆动作,飞控会一直处于解锁状态同时绿色指示灯会进行流水灯快闪状态3S。 飞控处于解锁状态时如果满足着陆条件,电机会进入上锁状态(以较低的油门量转动);当不满足着地条件时,飞控



2021电赛D题:基于互联网的摄像测量系统 思路
2021年全国电赛题目如下: 一:主要思路 基于opencv,树莓派,以及网络交换机组成的摄像测量系统。由测量摄像 系统与网络传输系统组成。支持开机自启动,一键测量,声光提示结束测量,高帧率显 示图像的系统。其中摄像系统包括两组树莓派与摄像头组合,网络传输系统由网线,以 太网交换机,以及终端树莓派及其树莓派组成。通过测量目标物体的像素位置,将坐标通 过网络交换机传递给终端服务器进行绳长的计

2020电赛无人机绕杆方案(收集别人的方案)
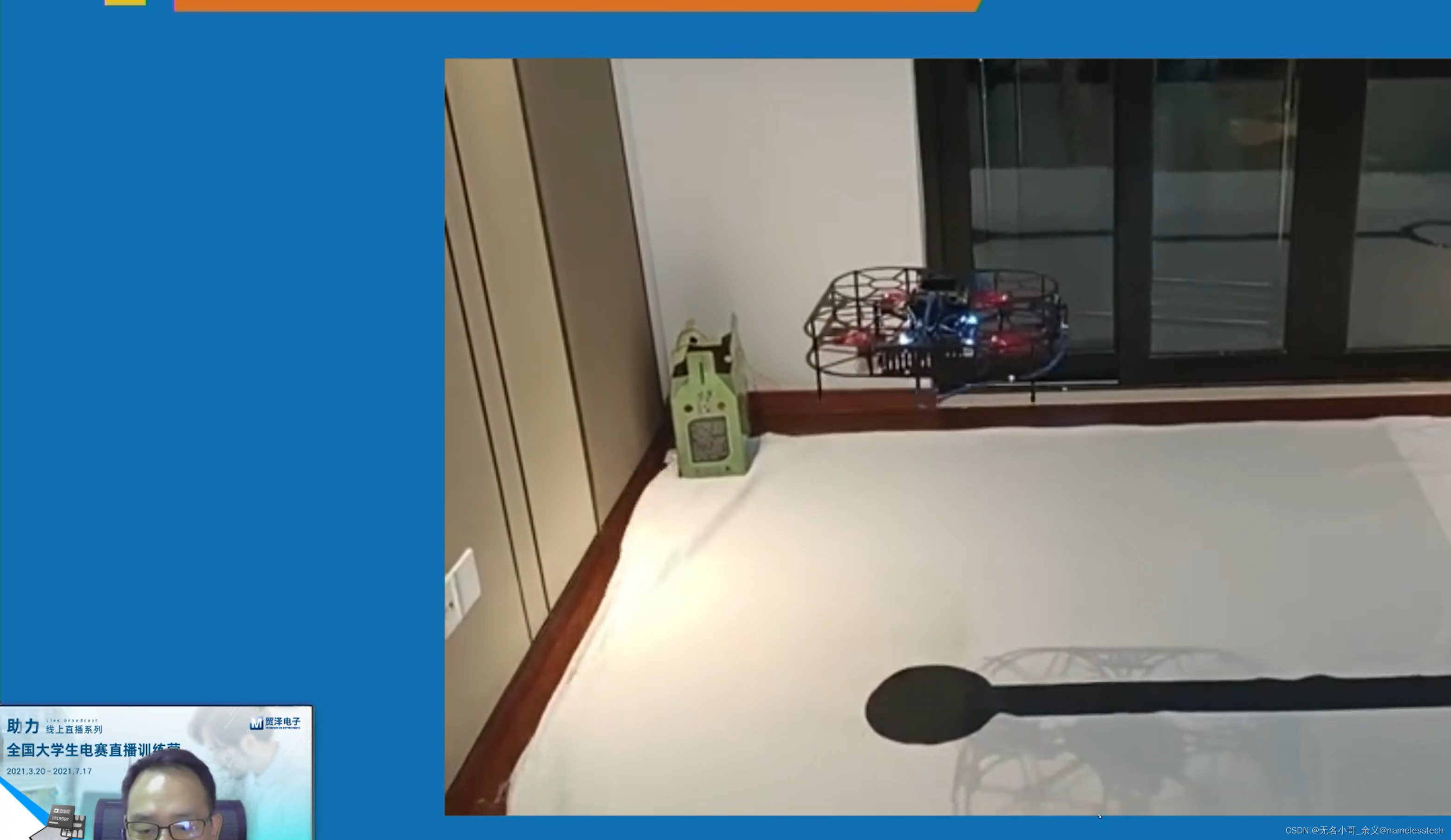
我这里只是收集一下别人的方案,学习学习。我自己也很想知道这种该怎么做。 https://www.bilibili.com/video/BV1mz4y1o71u/?spm_id_from=333.788.videocard.0 这个则是用了三个openmv加一个超声波。

一、电赛TI官方LaunchPad板飞行器MSP432飞控无人机硬件相关的模块介绍
1、飞控 ① 飞控的功能:实时获取无人机必要的导航信息,包括水平位置、速度、加速度、姿态角、角速度、运动航向等反馈数据,接收遥控器或者数传控制指令,实时控制无人机的飞行的位置、速度、姿态等状态,从而实现无人机的遥控/自主飞行任务。 ② 飞控系统的组成: 传感器数据采集:加速度计、陀螺仪、磁力计、气压计、超声波、激光雷达测距、光流模块、GPS定位模块、机器视觉处理OPEMMV、VIO、视觉

电赛知识点总结17:DDS
电赛知识点总结17:DDS DDS1 DDS1.1 DDS核心思想1.1.1 正弦波的相位-幅度表:1.1.2 内核1.1.3 优缺点 1.2 常用芯片1.2.1 AD9833 1.3 DDS的外围电路1.4 Vivado(FPGA)仿真1.5 实战1.5.1 AD98501.5.2 原理图1.5.3 PCB及注意事项1.5.4 单片机程序 2 椭圆滤波器 DDS 1 DDS

电赛知识点总结1:精密放大
电赛知识点总结1:精密放大 精密放大1 输出失调电压1.1 计算电路的输出失调电压1.2 反向选择运放参数和外部电路 2 带宽2.1 计算小信号带宽2.2 满功率带宽2.3 反向选择运放参数和外部电路 3 输出噪声3.1 计算输出噪声3.2 反向选择运放参数和外部电路 4 设计精密放大电路5 实战5.1 ADA45285.2 OPA388 精密放大 定义:带宽小于 50MH

2019电赛纸张检测,基于2214和stm32f407的纸张检测
先展示成果,在将细节。 一、流程图、串口数据截图 拟合的效果还是很好的。 二、讲些细节 1、在输入纸张数和电容值时我用了一个按键模块实现,总共用到了六个按键。 按键1:自变量(纸张数)+ 按键2:自变量- 按键3:数组+