本文主要是介绍基于Matlab使用蒙特卡洛法对机器人运动空间的求解等,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
一:机器人运动空间:
机器人末端执行器可到达所有位置和姿态的集合,在机器人设计和应用中必须充分考虑这些因素,机器人在运动过程中会受到范围限制,充分考虑机器人的运动限位。
二:求解机器人常用的方法:
包括:①数值法
②蒙特卡洛法
③几何分析法
④仿真法
本实验中,采用蒙特卡洛法与几何分析法,对SCARA机器人运动空间进行了求解与验证。
三:蒙特卡洛法
蒙特卡洛法(Monte Carlo method):是一种基于随机数统计的数值计算方法,常用于解决难以用解析方法求解的问题。基本思想是通过生成大量的随机数样本,从而近似地估计某个未知量的值。



四:基于matlab使用蒙特卡洛法并对机器人进行限位操作:

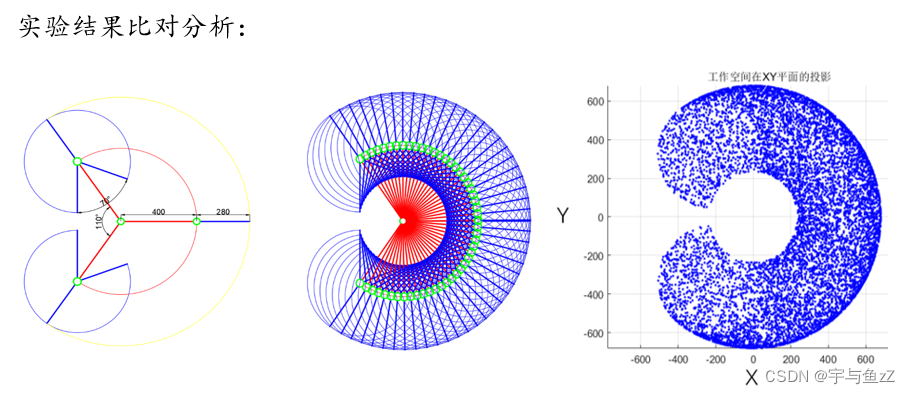
五:得到实验结果:


六:本实验中为了进一步验证蒙特卡洛法,又通过几何解析法来求解机器人运动空间,通过判断两种方法求解结果是否一致,来验证求得的机器人运动空间是否正确,实验结果如下:
这篇关于基于Matlab使用蒙特卡洛法对机器人运动空间的求解等的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!





