本文主要是介绍【DUSt3R】2张图2秒钟3D重建,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
【DUSt3R】2张图2秒钟3D重建
- 1. DUSt3R是一种用于稠密和无约束立体三维重建的方法,其实现步骤如下:
- 2. 实际运行效果
- 3. 运行结果
- 4. 自问自答
- 4.1 为社么这里要是使用transform模型呢?
- 4.2 CroCo(通过跨视图完成3D视觉任务的自我监督预训练的一个研究)在DUSt3R的作用是什么,为什么这个模型要使用CroCo?
- 4.3 ViT在DUSt3R的作用是什么,为什么这个模型要使用ViT
- 4.4 Pointmaps是什么
- 4.5 输入2张图 分别经过哪些模块的处理,处理过程中数据的维度是什么变化的
- 4.6 Weiszfeld算法?
- 4.7 zero-shot setting什么含义?
- 5. reference
1. DUSt3R是一种用于稠密和无约束立体三维重建的方法,其实现步骤如下:
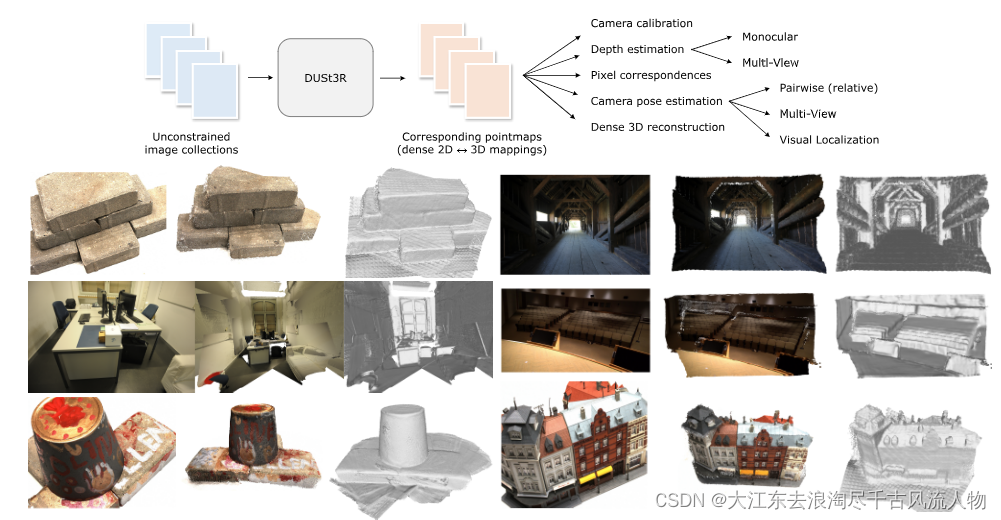
- 方法概述:
DUSt3R的方法旨在实现对任意图像集合进行三维重建,无需事先了解相机校准信息或视点姿势。它通过将成对重建问题视为点图的回归来实现,放宽了通常的投影相机模型的硬约束。这种方法将单眼和双眼重建情况进行了统一,并提出了一种简单而有效的全局对齐策略&#x
这篇关于【DUSt3R】2张图2秒钟3D重建的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!