本文主要是介绍pythonJax小记(五):python: 使用Jax深度图像(正交投影和透视投影之间的转换)(持续更新,评论区可以补充),希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
python: 使用Jax深度图像(正交投影和透视投影之间的转换)
- 前言
- 问题描述
- 1. 透视投影
- 2. 正交投影
- 直接上代码
- 解释
- 1. `compute_projection_parameters` 函数
- a. 参数解释
- b. 函数计算
- 2. `ortho_to_persp` 函数
- a. 计算投影参数:
- b. 生成像素坐标网格:
- c. 计算透视深度值:
- 3. `persp_to_ortho` 函数
- a. 计算投影参数:
- b. 生成像素坐标网格:
- c. 计算正交深度值:
前言
自用,刚开始接触可能顺序会比较乱。
问题描述
目前我知道的(欢迎评论区补充)照相机生成的深度图像有两种方法(如下图):

在透视投影中,物体的大小和形状会根据其距离观察者的远近而发生变化,这是因为透视投影模拟了人眼或相机镜头观察世界的方式,远处的物体看起来更小,近处的物体看起来更大。而在正交投影中,物体的大小和形状与其距离无关,提供了一种更抽象但尺寸精确的视图。
现在假设照相机正在观察一个又大平面又平整的物体:
1. 透视投影
在透视投影中,物体的大小会随着距离相机的远近而变化,即距离相机越远,物体在图像上看起来越小。这种投影方式能够模拟人眼观察世界的方式,因此在大多数三维图形应用中,透视投影是用来创建更加真实感的视觉效果。

虚线部分是照相机到照射物体的距离,从左到右依次叫做depth1p,depth2p,depth3p,depth4p,depth5p;它们之间的关系应该是:
depth1p=depth5p>depth2p=depth4p>depth3p
2. 正交投影
在正交投影中,所有的投影线都是平行的。这意味着无论物体距离相机有多远,它的大小在投影图上都保持不变。正交投影常用于工程图纸和某些类型的艺术作品,因为它不会因为透视而扭曲物体的比例。
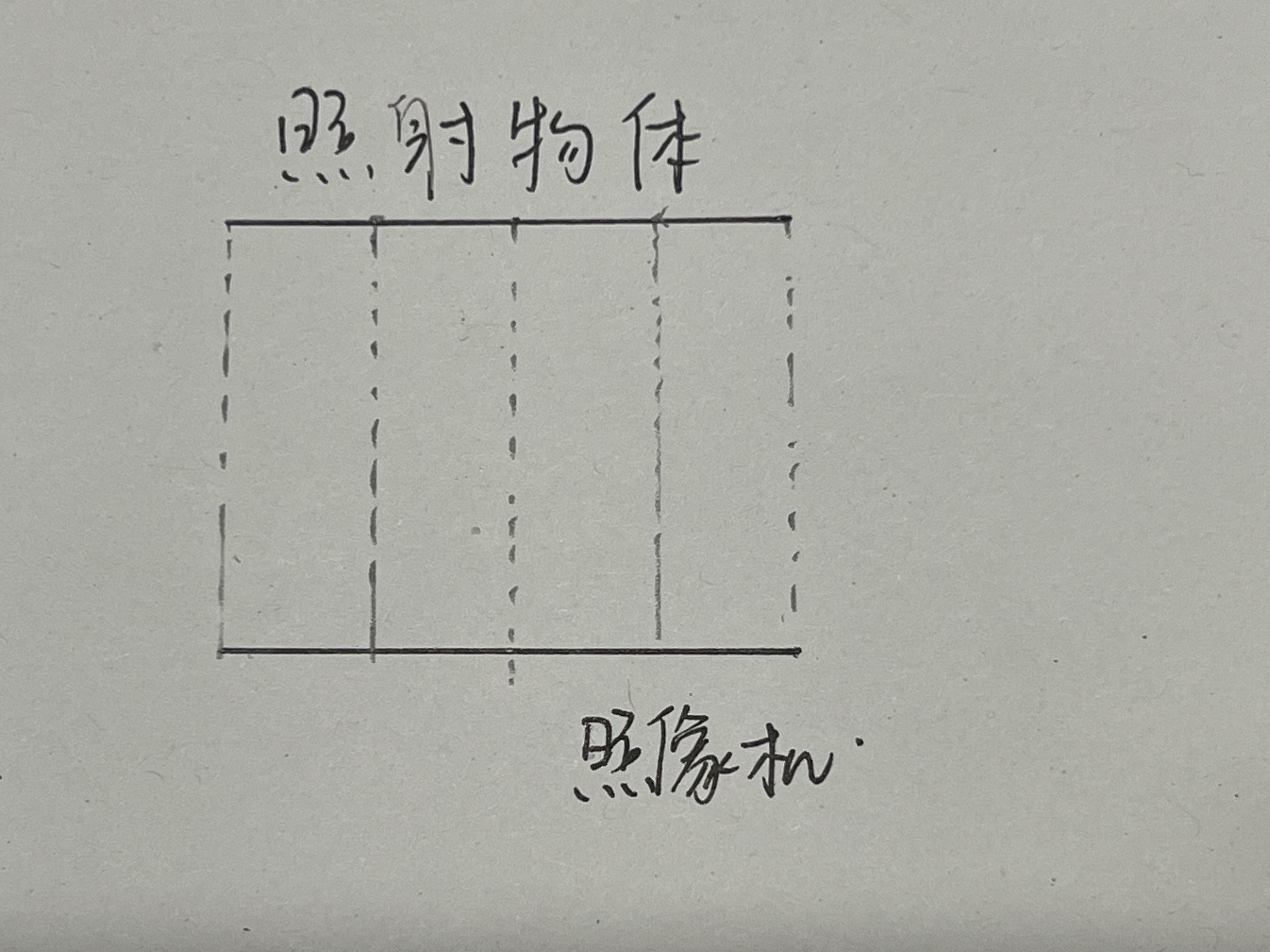
虚线部分是照相机到照射物体的距离,从左到右依次叫做depth1o,depth2o,depth3o,depth4o,depth5o;它们之间的关系应该是:
depth1o=depth2o=depth3o=depth4o=depth5o=depth3p(透视投影中最中心点的距离)
我想做的是depth1p <——>depth1o,depth2p <——>depth2o,depth3p <——>depth3o(数值相等不变),depth4p <——>depth4o,depth5p <——>depth5o之间的互相转化。
直接上代码
from jax import random
import jax.numpy as jnp
from jax import jitdef compute_projection_parameters(fov, resolution):"""计算透视投影所需的参数"""h, w = resolutionf = 0.5 * w / jnp.tan(fov * 0.5) # 假设fov是水平的# f = 0.5 * h / jnp.tan(fov * 0.5) # 假设fov是竖直的cx, cy = w * 0.5, h * 0.5return f, cx, cy@jit
def ortho_to_persp(depth_ortho, fov, resolution):"""正交投影深度图转换为透视投影深度图"""f, cx, cy = compute_projection_parameters(fov, resolution)y, x = jnp.indices(depth_ortho.shape)z = depth_orthox_persp = (x - cx) * z / fy_persp = (y - cy) * z / fdepth_persp = jnp.sqrt(x_persp**2 + y_persp**2 + z**2)return depth_persp@jit
def persp_to_ortho(depth_persp, fov, resolution): """透视投影深度图转换为正交投影深度图""" f, cx, cy = compute_projection_parameters(fov, resolution) y, x = jnp.indices(depth_persp.shape) # 逆向透视效果调整深度值 z = depth_persp # 假设所有点在深度图中直接面向相机,计算透视图中的实际深度 depth_ortho = z / jnp.sqrt(((x - cx) / f)**2 + ((y - cy) / f)**2 + 1) return depth_ortho# 创建随机键
key = random.PRNGKey(0)# 示例参数
fov = jnp.radians(58.0) # 58度的视场
resolution = (555, 555) # 深度图的分辨率# 使用JAX的随机数生成函数来创建假设的深度图
depth_ortho = random.uniform(key, resolution)
depth_persp = random.uniform(key, resolution)# 执行转换
depth_persp_converted = ortho_to_persp(depth_ortho, fov, resolution)
depth_ortho_converted = persp_to_ortho(depth_persp, fov, resolution)print("depth_ortho[277][277]:")
print(depth_ortho[277][277])
print("depth_ortho:")
print(depth_ortho)
print("depth_persp_converted[277][277]:")
print(depth_persp_converted[277][277])
print("depth_persp_converted:")
print(depth_persp_converted)print("depth_persp[277][277]:")
print(depth_persp[277][277])
print("depth_persp:")
print(depth_persp)
print("depth_ortho_converted[277][277]:")
print(depth_ortho_converted[277][277])
print("depth_ortho_converted:")
print(depth_ortho_converted)
输出:
depth_ortho[277][277]:
0.17295325
depth_ortho:
[[0.63084936 0.12969959 0.13633609 ... 0.5946181 0.59479845 0.4128834 ]
[0.29537833 0.3383578 0.5370909 ... 0.53237784 0.90082276 0.5761422 ]
[0.32716596 0.12419498 0.6801119 ... 0.55152595 0.48904026 0.8486302 ]
...
[0.30268252 0.2692206 0.73559785 ... 0.210132 0.06937218 0.61453307]
[0.30586207 0.18751395 0.5052029 ... 0.364128 0.3952657 0.09071398]
[0.64812434 0.6937938 0.5302503 ... 0.21545482 0.274127 0.7742363 ]]
depth_persp_converted[277][277]:
0.17295341
depth_persp_converted:
[[0.8015802 0.16468817 0.17299668 ... 0.7539958 0.75473905 0.5242654 ]
[0.37506145 0.4293407 0.68104595 ... 0.6746088 1.142268 0.73106426]
[0.41514048 0.15748264 0.8618096 ... 0.6983931 0.61969155 1.0760863 ]
...
[0.38381162 0.34114605 0.93148196 ... 0.26590642 0.08784546 0.7787128 ]
[0.388108 0.23777282 0.6401722 ... 0.46109253 0.5008643 0.11502781]
[0.82296646 0.88035184 0.6723719 ... 0.2730161 0.34760055 0.98242503]]
depth_persp[277][277]:
0.17295325
depth_persp:
[[0.63084936 0.12969959 0.13633609 ... 0.5946181 0.59479845 0.4128834 ]
[0.29537833 0.3383578 0.5370909 ... 0.53237784 0.90082276 0.5761422 ]
[0.32716596 0.12419498 0.6801119 ... 0.55152595 0.48904026 0.8486302 ]
...
[0.30268252 0.2692206 0.73559785 ... 0.210132 0.06937218 0.61453307]
[0.30586207 0.18751395 0.5052029 ... 0.364128 0.3952657 0.09071398]
[0.64812434 0.6937938 0.5302503 ... 0.21545482 0.274127 0.7742363 ]]
depth_ortho_converted[277][277]:
0.17295307
depth_ortho_converted:
[[0.49648297 0.10214445 0.10744441 ... 0.46892923 0.4687517 0.32516485]
[0.23262416 0.26665536 0.4235641 ... 0.42013407 0.7104127 0.45405012]
[0.25783455 0.09794345 0.53672194 ... 0.4355439 0.3859345 0.6692523 ]
...
[0.23870227 0.21245952 0.58090675 ... 0.1660564 0.05478369 0.4849681 ]
[0.24104528 0.14787847 0.39868954 ... 0.2875544 0.31193072 0.07153945]
[0.510428 0.5467698 0.41816944 ... 0.17002945 0.21618383 0.6101655 ]]
解释
1. compute_projection_parameters 函数
compute_projection_parameters函数的目的是根据给定的视场角(Field of View, FOV)和图像分辨率来计算透视投影所需的参数。这些参数主要是焦距(f)和图像的中心点坐标(cx,cy)。这些参数对于将三维空间中的点投影到二维图像平面上,以及进行透视投影与正交投影之间的转换非常重要。
a. 参数解释
-
fov:视场角,表示相机视角的宽度。在三维图形和计算机视觉中,FOV是一个关键参数,因为它定义了可见场景的范围。视场角越大,相机能够看到的场景就越宽广。
-
resolution:图像分辨率,通常以像素为单位表示图像的宽度和高度。在这个上下文中,分辨率告诉我们图像平面的尺寸,这对于计算图像中点的位置非常重要。
b. 函数计算
焦距(f) 的计算基于视场角(FOV)和图像宽度。焦距是一个表示相机与图像平面之间距离的参数,它影响着场景在图像平面上的投影方式。在这个函数中,焦距是通过下面的公式计算的:
f = 0.5 × w i d t h / t a n ( F O V / 2 ) f = 0.5 × width / tan(FOV/2) f=0.5×width/tan(FOV/2)
这个公式利用了简单的三角形几何关系,其中假设图像平面的宽度直接对应于视场角的跨度。通过这个公式,我们可以根据视场角和图像宽度计算出焦距。
图像中心点坐标(cx,cy) 的计算很直接:它们是图像宽度和高度的一半。图像中心点是图像平面上的一个关键参考点,因为它通常被用作投影和反投影过程中的原点。
2. ortho_to_persp 函数
ortho_to_persp函数的目的是将正交投影的深度图转换为透视投影的深度图。这个转换过程需要根据视场角(FOV)、图像分辨率以及焦距(f)和图像中心(cx, cy)这些计算出的投影参数来完成。
a. 计算投影参数:
首先,利用compute_projection_parameters函数根据FOV和图像分辨率计算出焦距(f)和图像中心(cx, cy)。
b. 生成像素坐标网格:
使用jnp.indices生成一个与输入深度图相同尺寸的像素坐标网格。这个网格包含了每个像素点的行(y)和列(x)坐标。
c. 计算透视深度值:
- 通过(x - cx)和(y - cy)计算每个像素点相对于图像中心的偏移。
- 使用偏移值和深度值(z)以及焦距(f)来调整每个像素的深度值。这里,深度值(z)乘以偏移量除以焦距,计算出在透视视图下像素的“新”位置。
- 最后,利用
jnp.sqrt(x_persp**2 + y_persp**2 + z**2)计算每个像素点在透视投影中的实际深度值。这个步骤通过考虑像素在透视投影中的三维空间位置(考虑深度z)来调整深度图,使得远处的物体看起来更小,近处的物体看起来更大。
3. persp_to_ortho 函数
persp_to_ortho函数的目的是将透视投影的深度图转换为正交投影的深度图。这个过程需要逆转透视投影中深度与像素位置关系的影响,恢复到一个正交视图中,其中物体的大小不会因为它们距离相机的远近而改变。
a. 计算投影参数:
首先,利用compute_projection_parameters函数根据FOV和图像分辨率计算出焦距(f)和图像中心(cx, cy)。
b. 生成像素坐标网格:
使用jnp.indices生成一个与输入深度图相同尺寸的像素坐标网格。这个网格包含了每个像素点的行(y)和列(x)坐标。
c. 计算正交深度值:
在公式depth_ortho = z / jnp.sqrt(((x - cx) / f)**2 + ((y - cy) / f)**2 + 1)中:
(x - cx)和(y - cy)计算的是像素点相对于图像中心的位置差异。/ f是根据焦距来缩放这些差异,使其与实际的视角对应起来。((x - cx) / f)**2 + ((y - cy) / f)**2计算的是像素点从图像中心到该点的距离的平方,这个距离是在图像平面上的。- +1实际上是在计算直角三角形的斜边长度时必须添加的项。想象一个直角三角形,其中
(x - cx) / f和(y - cy) / f代表两个直角边上的长度,而我们想要找的是斜边的长度,即从相机到像素点的实际距离。在这种情况下,+1代表了这个直角三角形斜边计算中的垂直边(即相机到图像平面的距离),它是一个常数,因为在透视投影中,所有的像素点都是从相同的焦点投影到图像平面上的。+1在这里同时确保了对于所有像素,即使在图像中心(x=cx,y=cy)也能正确处理深度值。 - 最后用已知的深度
z比上这个比例得到正交投影下的深度值。
这篇关于pythonJax小记(五):python: 使用Jax深度图像(正交投影和透视投影之间的转换)(持续更新,评论区可以补充)的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!




