本文主要是介绍【转】UML建模之状态图(Statechart Diagram),希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
状态图目录:
一、状态图简介(Brief introduction)
二、状态图元素(State Diagram Elements)
1、状态(States)
2、转移(Transitions)
3、动作(State Actions)
4、自身转移(Self-Transitions)
5、组合状态(Compound States)
6、进入节点(Entry Point)
7、退出节点(Exit Point)
8、历史状态(History States)
9、并发区域(Concurrent Regions)
三、状态图案例分析(State Diagram Example Analysis)
四、总结(Summary)
一、状态图简介(Brief introduction)
状态图(Statechart Diagram)主要用于描述一个对象在其生存期间的动态行为,表现为一个对象所经历的状态序列,引起状态转移的事件(Event),以及因状态转移而伴随的动作(Action)。一般可以用状态机对一个对象的生命周期建模,状态图用于显示状态机(State Machine Diagram),重点在与描述状态图的控制流。
如下图例子,状态机描述了门对象的生存期间的状态序列,引起转移的事件,以及因状态转移而伴随的动作(Action).
状态有Opened、Closed、Locked。
事件有 Open、Close、Lock和Unlock。
注意:
1、 并不是所有的事件都会引起状态的转移,比如当门是处于【Opened】状态,不能进行【Lock】事件。
2、 转移(Transition)有警备条件(guard condition),比如只有doorWay->isEmpty 条件满足时,才会响应事件。
二、状态图元素(State Diagram Elements)
1、状态(States)
指在对象的生命周期中的某个条件或者状况,在此期间对象将满足某些条件、执行某些活动活活等待某些事件。所有对象都有状态,状态是对象执行了一系列活动的结果,当某个事件发生后,对象的状态将发生变化。
状态用圆角矩形表示

初态和终态(Initial and Final States)
初态用实心圆点表示,终态用圆形内嵌圆点表示。

2、转移(Transitions)
转移(Transitions)是两个状态之间的一种关系,表示对象将在源状态(Source State)中执行一定的动作,并在某个特定事件发生而且某个特定的警界条件满足时进入目标状态(Target State)
事件标记(Trigger):是转移的诱因,可以是一个信号,事件、条件变化(a change in some condition)和时间表达式。
警界条件(Guard Condition):当警界条件满足时,事件才会引发转移(Transition)。
结果(Effect):对象状态转移后的结果。
3、动作(State Actions)
动作(Actions)是一个可执行的原子操作,也就是说动作是不可中断的,其执行时间是可忽略不计的。
在上例中,对象状态转移后的结果显示在转移线上,如果目标状态有许多转移,而且每个转移有相同的结果,这时把转移后的结果(Effect)展示在目标状态中(Target State)更好一些,可以定义进入动作(Entry Action )和退出动作(Exit Action),如下图
4、自身转移(Self-Transitions)
状态可以有返回自身状态的转移,称之为自身转移(Self-Transitions)
2S后,Poll input事件执行,转移到自己状态【Waiting】
5、组合状态(Compound States)
嵌套在另外一个状态中的状态称之为子状态(sub-state),一个含有子状态的状态被称作组合状态(Compound States). 如下图,【Check PIN】是组合状态,【Enter PIN】是子状态。
也可用以下方式进行描述

如上图,状态机【Check PIN】的细节被分割到另外一个图中了。
6、进入节点(Entry Point)
如下图所示,由于一些原因并不会执行初始化(initialization),而是直接通过一个节点进入状态【Ready】,则此节点称之为进入节点(Entry Point)
7、退出节点(Exit Point)
8、历史状态(History States)
历史状态是一个伪状态(Pseudostate),其目的是记住从组合状态中退出时所处的子状态,当再次进入组合状态,可直接进入这个子状态,而不是再次从组合状态的初态开始。
在上图的状态图中,正常的状态顺序是:【Washing】- >【Rinsing】->【Spinning】。
如果是从状态【Rinsing】突然停电(Power Cut)退出,,洗衣机停止工作进入状态【Power Off】,当电力恢复时直接进入状态【Running】。
9、并发区域(Concurrent Regions)
状态图可以分为区域,而区域又包括退出或者当前执行的子状态。说明组合状态在某一时刻可以同时达到多个子状态。如下图刹车系统,同时进入前刹车【Applying Front Brakes】状态和后刹车【Applying Rear Brakes】状态。

三、状态图案例分析(State Diagram Example Analysis)

按照blink518的建议(“出货中”是属于条件分支应该使用Decision),改成如下图也是很好的做法:
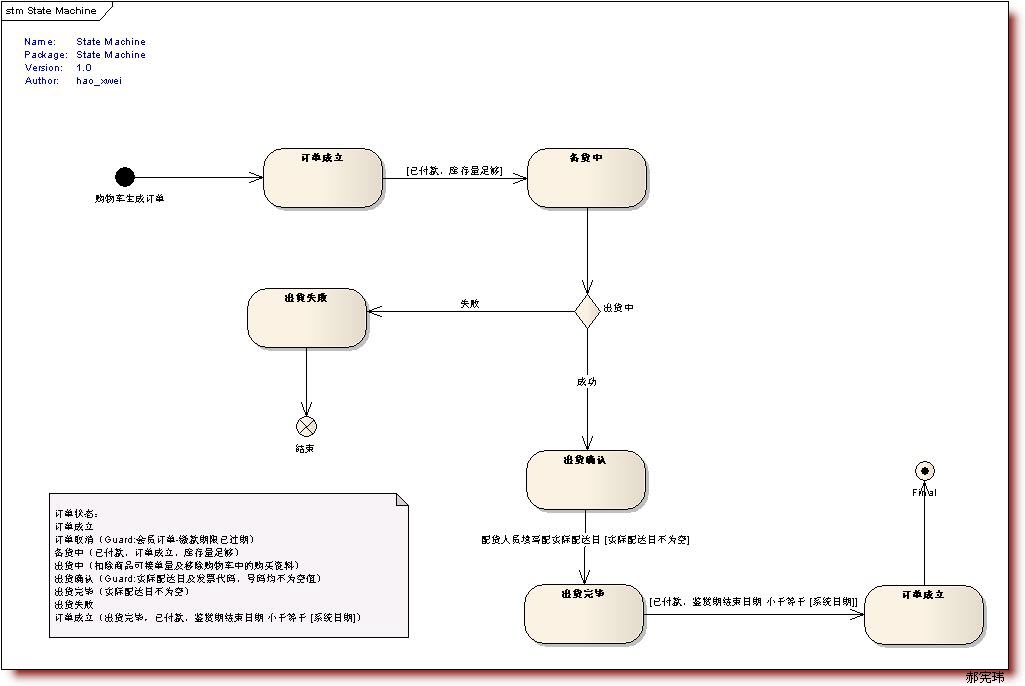
订单成立状态主要有:
订单成立
订单取消(Guard:会员订单-缴款期限已过期)
备货中(Guard:已付款、订单成立、库存量足够)
出货中(Effect:扣除商品可接单量及移除购物车中的购买资料)
出货确认(Guard:实际配达日及发票代码、号码均不为空值)
出货完毕(Guard:实际配达日不为空)
出货失败
订单成立(Guard:出货完毕,已付款、鉴赏期结束日期 小于等于 [系统日期])
分析:
1、购物车生成订单进入状态【订单成立】
2、系统检测订单已经付款并且库存量足够,则进入状态【备货中】
3、物流发货,进入状态【发货中】,状态转移为【发货中】后,需要做的操作有“扣除商品可接单量及移除购物车中的购买资料”
4、发货完毕后,状态分为【出货确认】和状态【出货失败】,如果状态是【出货失败】,则【结束】,如果状态为【出货确认】,则进入下一步。
5、配货人员填写实际配达日期,进入状态【出货完毕】。
6、如果”已付款、鉴赏期结束日期 小于等于 [系统日期]”,则【订单成立】。
四、总结(Summary)
状态图重点在于描述对象的状态及其状态之间的转移,状态图的基本元素主要有:状态、转移、动作、自身转移、组合状态、进入节点、退出节点、历史状态、并发区域等,状态中的事件分为调用事件(Call)、变化事件(Change)、时间事件(Time)和信号事件(Singal)。最后以实例对状态对进行了分析。

版权
作者:灵动生活
出处:http://www.cnblogs.com/ywqu
如果你认为此文章有用,请点击底端的【推荐】让其他人也了解此文章,
你也可以加我的新浪微博,以便实时了解我的动态:http://weibo.com/ywqu
WOWO英语(英语培训学校):http://www.wowomandarin.cn 上海电子商务解决方案:http://www.hello36.com
上海闪酷系列解决方案:
电子商务解决方案 移动电商APP软件 培训学校管理系统 购物分享社区系统 移动开发解决方案 在线问卷调查系统
本文版权归作者和博客园共有,欢迎转载,但未经作者同意必须保留此段声明,且在文章页面明显位置给出原文连接,否则保留追究法律责任的权利。
这篇关于【转】UML建模之状态图(Statechart Diagram)的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!






