本文主要是介绍大疆L1激光点云数据处理(DJI Terra-大疆智图),希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
大疆L1激光点云数据处理
- 前言
- 处理步骤
- 查看成果
前言
大疆L1是一个激光雷达载荷,该载荷包括一个激光点云传感器和一个可见光传感器。截止2023年12月,已经发布了升级版L2,本文以L1获取的数据为例。
- 在使用L1的时候,应该开启RTK模式,否则无法在DJI Terra中处理
- 软件:DJI Terra(大疆智图)
该软件是大疆官方发布的点云处理软件,在非付费版中,可以将L1中的激光点云数据转换成常用的点云格式,如LAS/PLY/PCD/S3MB等
处理步骤
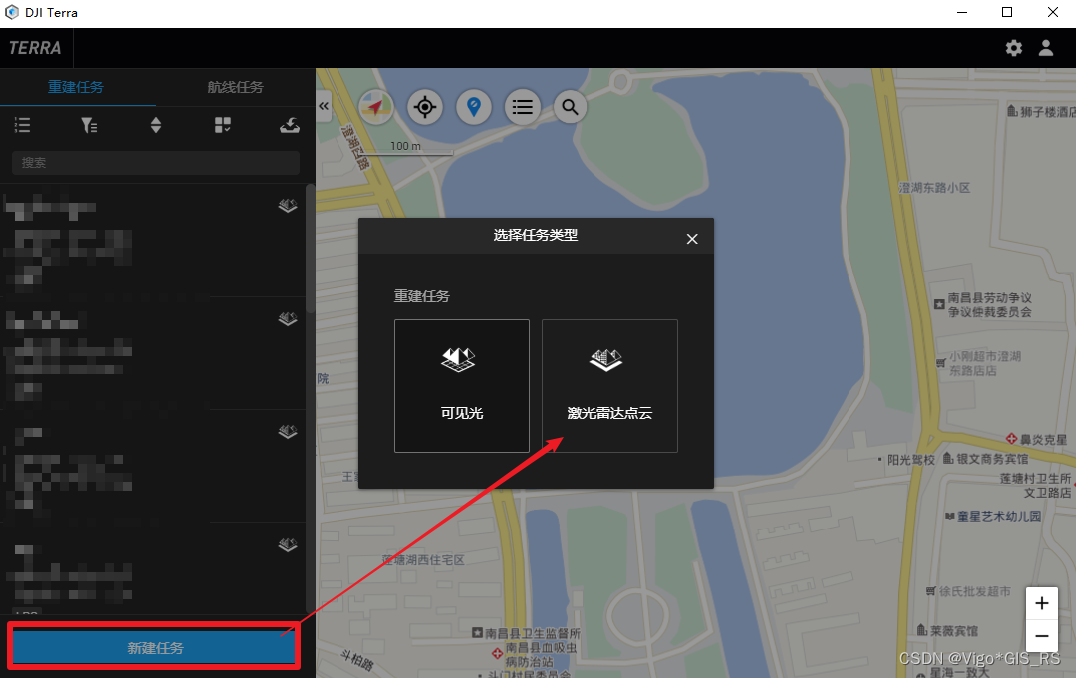
- 在DJI Terra中新建项目,点击新建任务,选择激光雷达点云
- 输入项目名称
- 添加点云数据,选择点云所在的文件夹

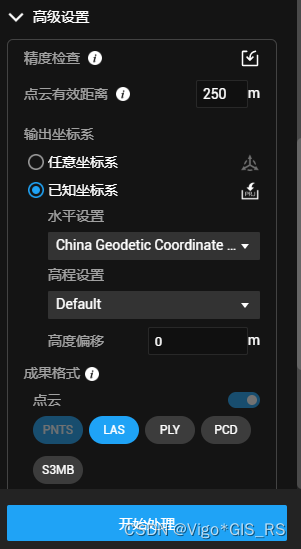
- 在高级设置中选择点云的有效距离、坐标和成果格式,然后点击开始处理。
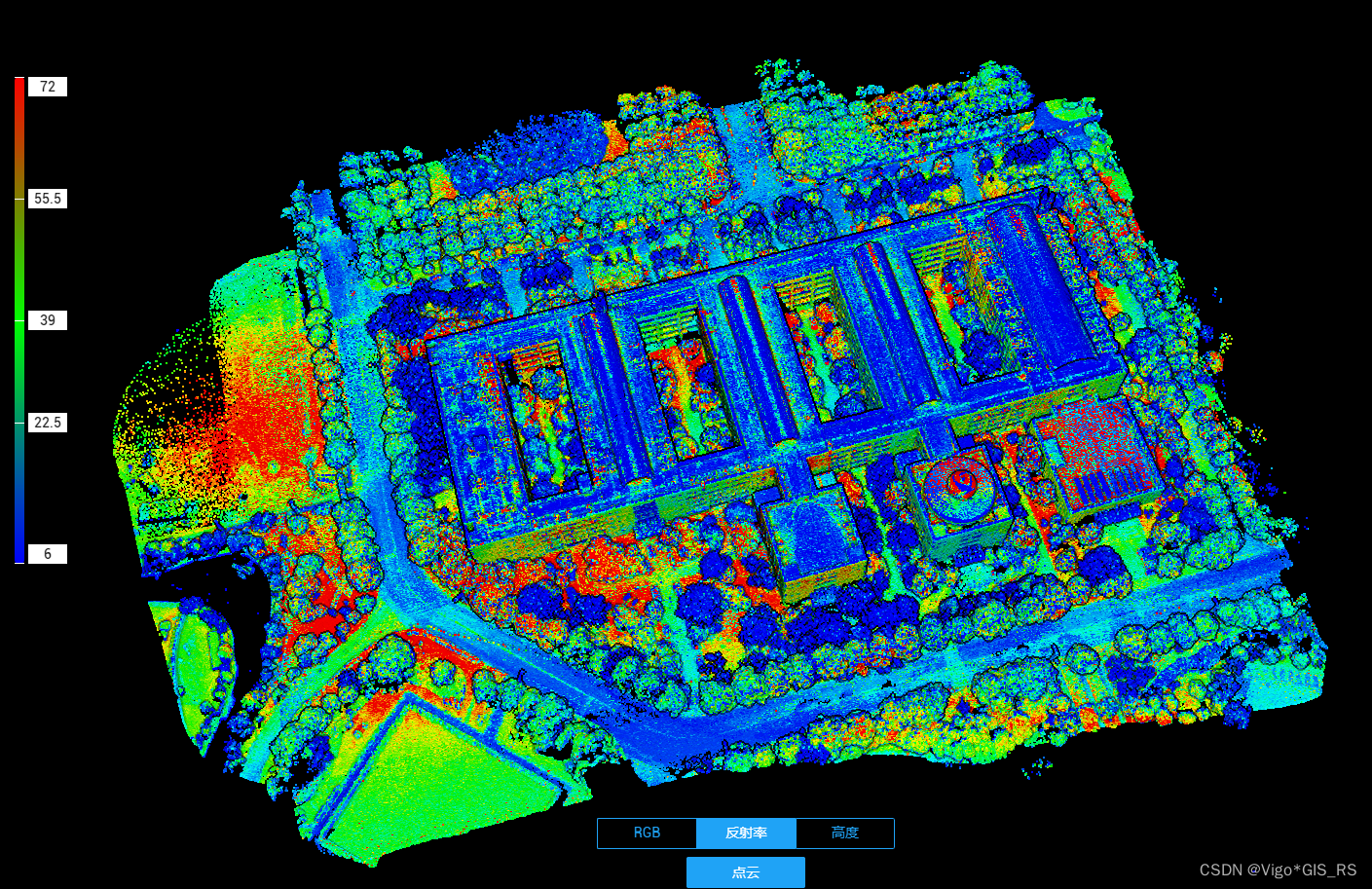
- 查看点云输出成果
查看成果
在DJI Terra中,我们需要先设定好成果输出路径

打开这个路径,找到项目文件夹

这个las就是刚刚做好的点云。
这篇关于大疆L1激光点云数据处理(DJI Terra-大疆智图)的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!






