本文主要是介绍vtk三维场景基本要素 灯光、相机、颜色、纹理映射 简介,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
整理一下VTK 三维场景基本要素,后面会一一进行整理;
1. 灯光 vtkLight
剧场里有各式各样的灯光,三维渲染场景中也一样,可以有多个灯光存在。灯光和相机 是三维渲染场景必备的要素,vtkRenderer会自动创建默认的灯光和相机;
vtkLight可以分为位置灯光(Positional Light,也叫聚光灯)和方向灯光(Direction Light)。 位置灯光是光源位置在渲染场景中的某个位置,可以指定灯光的衰减值、锥角等;方向灯光 即光源位置在无穷远,可以认为光线是平行的,比如自然界中的太阳光。光源的位置和焦点 的连线定义光线的方向,默认的vtkLight为方向灯光。
VTK中用 vtkLight 代表现实场景中的灯光。常用方法如下:SetColor( ) 设置灯光颜色SetPoison( ) 设置灯光位置SetFocalPoint( ) 设置灯光焦点SetIntensity( ) 设置灯光强度SetSwitch( )/SwitchOn( )/SwitchOff( ) 打开或关闭对应灯光
样例:
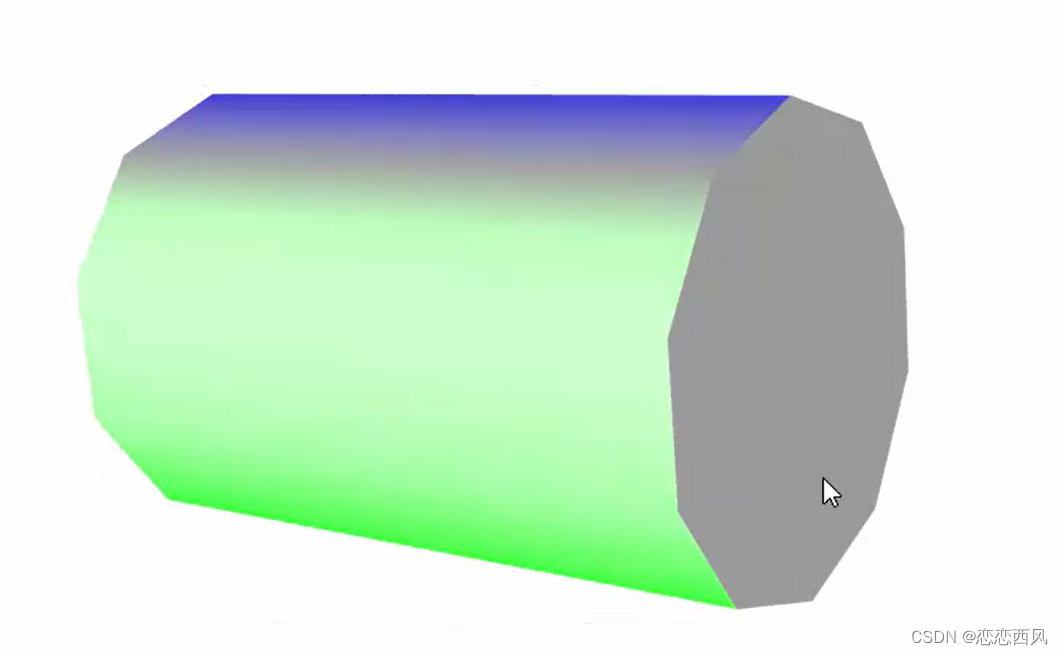
本程序光照示例定义了两个vtkLight对象,一个为绿色光,位置在(0,0,1),焦点对着相机的焦点; 另一个为蓝色光,位置在(0,0,-1),焦点也是对着相机的焦点,最后调用vtkRenderer的方法 AddLight()将两个灯光对象加入到渲染场景中。因为Renderer里可以有多个灯光,所以VTK 提供的接口是AddLight()而不是SetLight。
#include <QApplication>
#include <vtkAutoInit.h>
VTK_MODULE_INIT(vtkRenderingOpenGL2)
VTK_MODULE_INIT(vtkInteractionStyle)#include <vtkSmartPointer.h>
#include <vtkRenderWindow.h>
#include <vtkRenderer.h>
#include <vtkRenderWindowInteractor.h>
#include <vtkInteractorStyleTrackballCamera.h>
#include <vtkCylinderSource.h>
#include <vtkPolyDataMapper.h>
#include <vtkActor.h>
#include <vtkLight.h>
#include <vtkCamera.h>
#include <vtkProperty.h>int main()
{vtkSmartPointer<vtkCylinderSource> cylinder = vtkSmartPointer<vtkCylinderSource>::New();cylinder->SetHeight( 3.0 );cylinder->SetRadius( 1.0 );cylinder->SetResolution( 10 );vtkSmartPointer<vtkPolyDataMapper> cylinderMapper = vtkSmartPointer<vtkPolyDataMapper>::New();cylinderMapper->SetInputConnection( cylinder->GetOutputPort() );vtkSmartPointer<vtkActor> cylinderActor = vtkSmartPointer<vtkActor>::New();cylinderActor->SetMapper( cylinderMapper );vtkSmartPointer<vtkRenderer> renderer = vtkSmartPointer<vtkRenderer>::New();renderer->AddActor( cylinderActor );renderer->SetBackground( 1.0, 1.0, 1.0 );vtkSmartPointer<vtkRenderWindow> renWin = vtkSmartPointer<vtkRenderWindow>::New();renWin->AddRenderer( renderer );renWin->SetSize( 640, 480 );renWin->Render();renWin->SetWindowName("RenderCylinder-Lights");vtkSmartPointer<vtkRenderWindowInteractor> iren = vtkSmartPointer<vtkRenderWindowInteractor>::New();iren->SetRenderWindow(renWin);vtkSmartPointer<vtkInteractorStyleTrackballCamera> style = vtkSmartPointer<vtkInteractorStyleTrackballCamera>::New();iren->SetInteractorStyle(style);vtkSmartPointer<vtkLight> myLight = vtkSmartPointer<vtkLight>::New();myLight->SetColor(0,1,0); //设置光颜色 myLight->SetPosition(0,0,1); //设置光照位置myLight->SetFocalPoint(renderer->GetActiveCamera()->GetFocalPoint()); //设置灯光焦点renderer->AddLight(myLight);vtkSmartPointer<vtkLight> myLight2 =vtkSmartPointer<vtkLight>::New();myLight2->SetColor(0,0,1); //设置光颜色 myLight2->SetPosition(0,0,-1); //设置光照位置myLight2->SetFocalPoint(renderer->GetActiveCamera()->GetFocalPoint()); //设置灯光焦点renderer->AddLight(myLight2);iren->Initialize();iren->Start();return EXIT_SUCCESS;
}2.相机 vtkCamera
观众的眼睛好比三维渲染场景中的相机,在VTK中用vtkCamera类来表示。vtkCamera 负责把三维场景投影到二维平面,如屏幕。相机投影示意图如图2-4所示。从下图可以看出与相机投影相关的要素主要有如下儿个
1)相机位置
相机所处的位置,用vtkCamera::SetPosition()方法设置。
2)相机焦点
用vtkCamera::SetFocusPoint()方法设置,默认的焦点位置在世界坐标系的 原点o
3)朝上方向
朝上方向即哪个方向为相机朝上的方向。就好比直立看东西,方向为头朝 上,看到的东西也是直立的,如果倒立看某个东西,这时方向为头朝下,看到的东西就是倒 立的。相机位置、相机焦点和朝上方向三个因素确定了相机的实际方向,即确定相机的视图。
4)投影方向
相机位置到相机焦点的向量方向即为投影方向。
5)投影方法
该要素用于确定Actor是如何映射到像平面的。vtkCamera定义了两种投 影方法:一种是正交投影(Orthographic Projection),也叫平行投影(Parallel Projection),即 进入相机的光线与投影方向是平行的:另一种是透视投影(Perspective Projection),即所有光 线相交于一点。该投影方法最符合人类眼睛对于景物所产生的近大远小的视觉习惯。
6)视角
透视投影时需要指定相机的视角(View Angle),默认的视角大小为30° ,可 以用 vtkCamera::SetViewAngle()方法设置。
7)前后裁剪平面
裁剪平面与投影方向相交,一般与投影方向也是垂直的。裁剪平面主 要用于评估Actor与相机距离的远近,只有在前后裁剪平面之间的Actor才是可见的。裁剪平 面的位置可以用vtkCamera::SetClippingRange()方法设置。
如何生成和设置相机:
vtkSmartPointer<vtkCamera> myCamera = vtkSmartPointer<vtkCamera>::New();myCamera->SetClippingRange(0.0475, 2.3786); //裁剪平面的位置 裁剪平面主 要用于评估Actor与相机距离的远近,只有在前后裁剪平面之间的Actor才是可见的myCamera->SetFocalPoint(0.0573, -0.2134, -0.0523); //相机焦点myCamera->SetPosition(0.3245, -0.1139, 1); //相机位置myCamera->SetViewUp(-0.2234, 0.9983, 0.0345); //相机朝上方向renderer->SetActiveCamera(myCamera); //相机设置到渲染场景中
控制相机运动的方法
Dolly()Roll()Azimuth()Yaw()Elevation()Pitch()Zoom()
3.颜色
颜色是Actor重要的属性之一。VTK采用RGB和HSV两种颜色系统来描述颜色。
RGB颜色系统
RGB颜色系统由三个颜色分量:红色(R)、绿色(G)和蓝色(B)的组合表示,在 VTK里,这三个分量的取值范围都是0〜1, (0, 0, 0)表示黑色,(1, 1, 1)表示白色。 vtkProperty::SetColor(r, g, b)釆用的就是RGB颜色系统设置颜色属性值。
HSV颜色系统
HSV颜色系统同样也是由三个分量来决定颜色,它们分别是:色相(Hue),表示颜色 的基本属性,就是通常所说的颜色名称,如红色、黄色等;饱和度(Saturation),是指颜色 的纯度,其值越高则越纯;值(Value,也就是强度Intensity或者亮度Bright),值为0通常 表示的是黑色,值为1表示的是最亮的颜色。这三个分量的取值范围0~1。
类vtkLookupTable提供了 HSV颜色系统设置的方法。
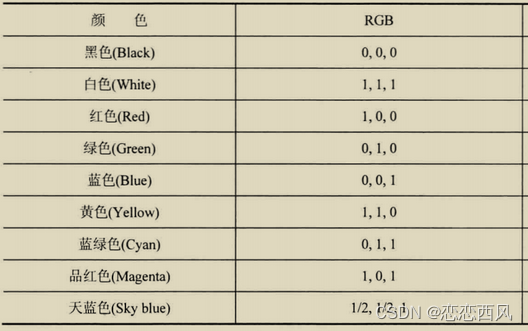
常用颜色RGB值
4. 纹理映射
纹理映射是把二维图像“贴”到三维物体表面。纹理投射是创建现实的,引人注目的可视化的一个强大的图象工具。2D纹理投射背后的基本思想是图象可以在绘制过程中被“糊制”到一个表面,因此创建了更丰富且更细节的图象。纹理投射需要两块信息:在VTK中是一个vtkImageData数据集的一个纹理图片;和控制一个表面上纹理定位的的纹理坐标
这篇关于vtk三维场景基本要素 灯光、相机、颜色、纹理映射 简介的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!



